Open source movement has unleashed human creativity, having a big impact in production, prototyping and innovation. It has enabled anyone to make IoT devices, drones, robotics and also customization to fit specific contexts.
We will see how the advances made in the last years in the open source hardware and software ecosystem have allowed a fast growth of costly and complex systems with a lower budget and more friendly learning curves. Also we will walk through the main differences between open source hardware and industrial proprietary software.
In this seminar the students will be introduced on how to develop hardware projects covering the whole process including research, prototyping and documentation.
We will focus on actuators like different types of motors, solenoid valves, pneumatics, relays, electromagnets and how to control them from a microcontroller.

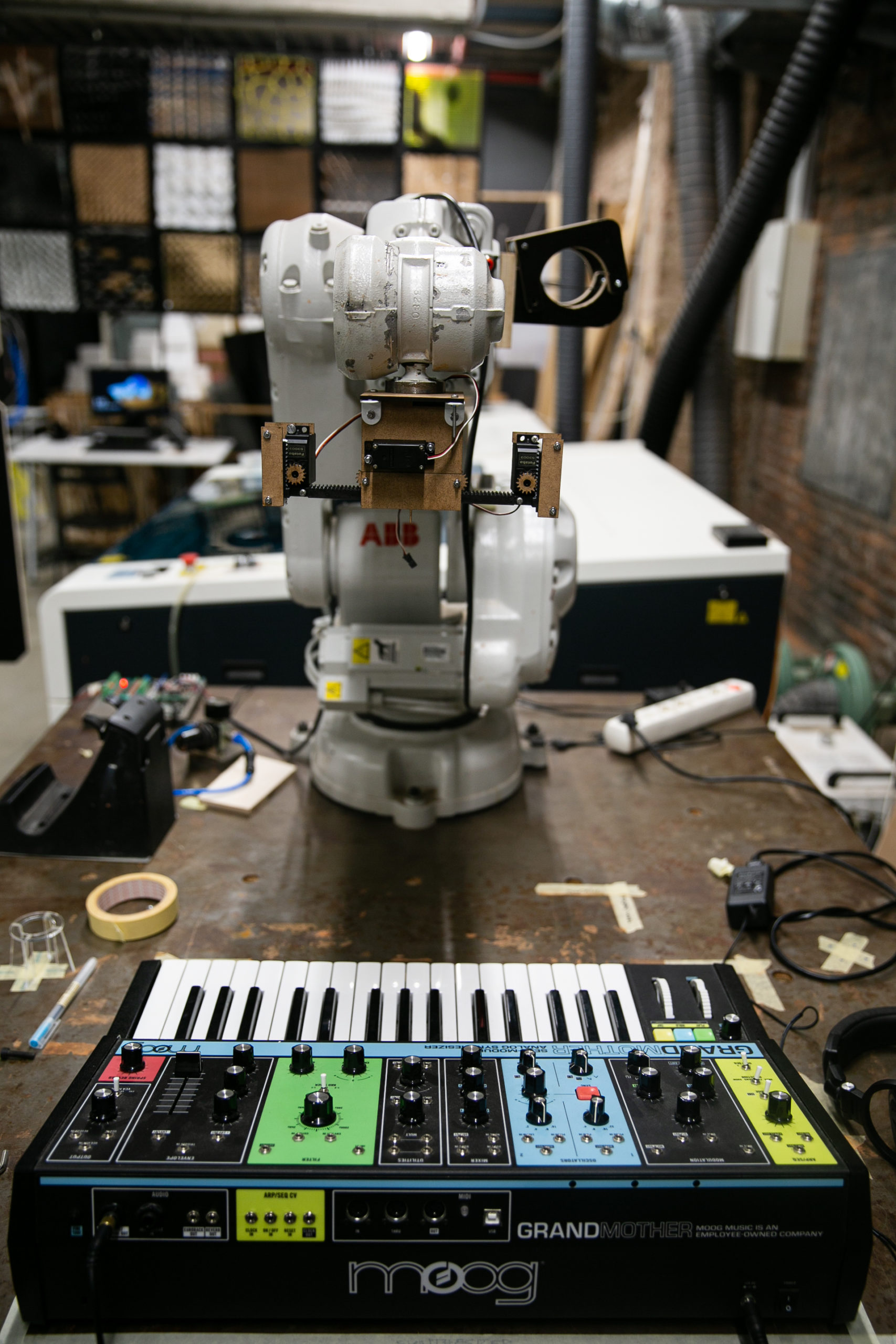
Photo Credits DOT BOT//PATTERN BOT
Learning Objectives
The objective of the seminar is to give an overview of the state of the art in robotic actuation, discuss the practical implementation of such actuators, and brainstorm how these actuators and the robotic arms could bring new levels of versatility, agility and efficiency to the production and construction processes.
At course completion the student will learn:
- How to use microcontrollers and embedded systems
- How to control different actuators like motors, relays, electrovalves, etc..
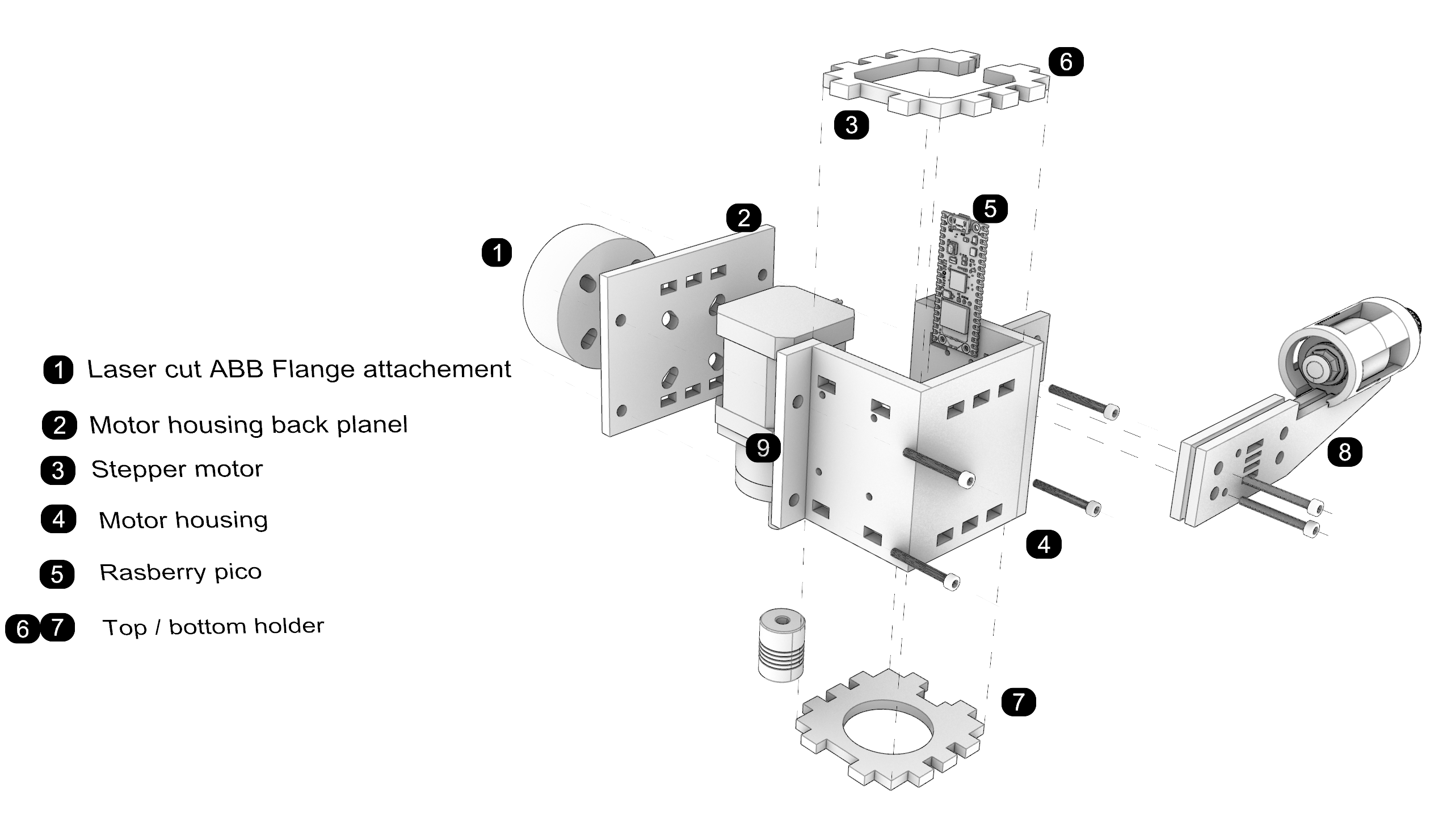
- Communication between ABB arm robot and custom end effector