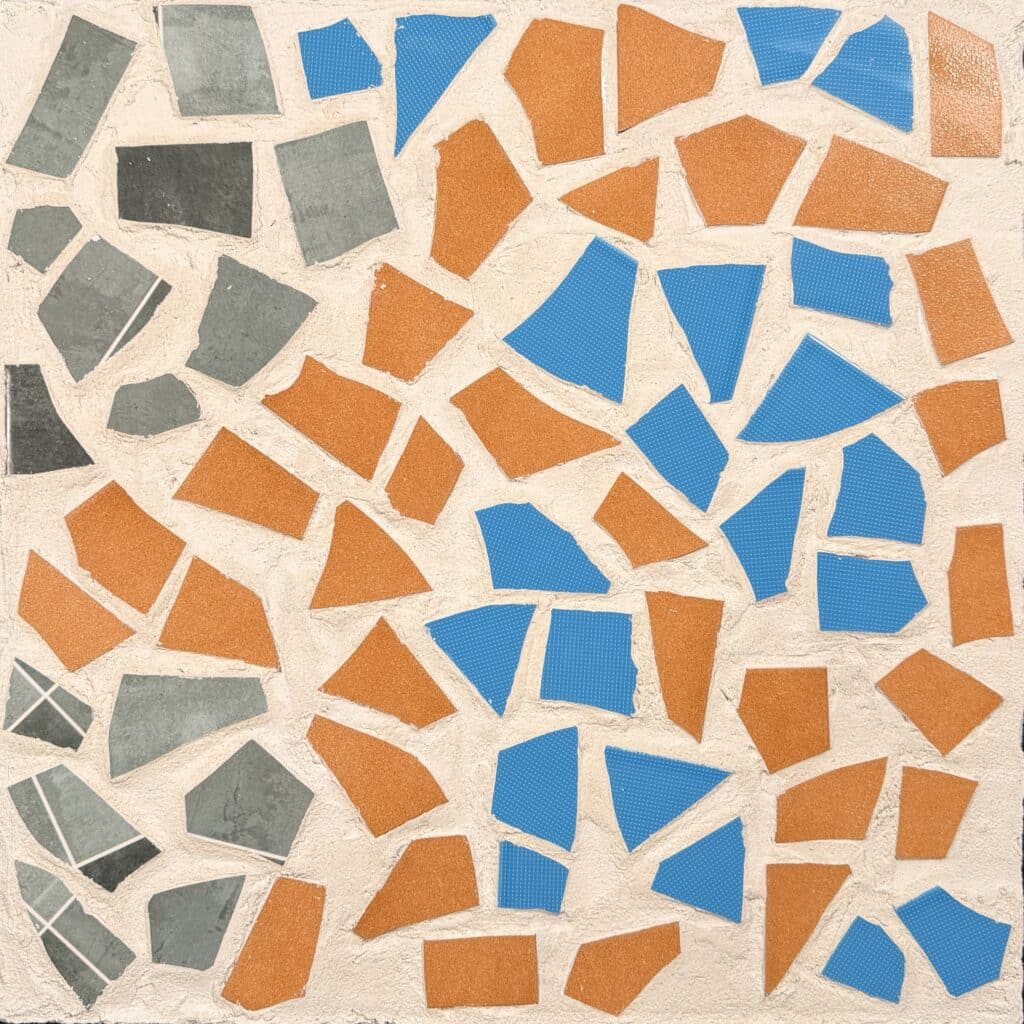
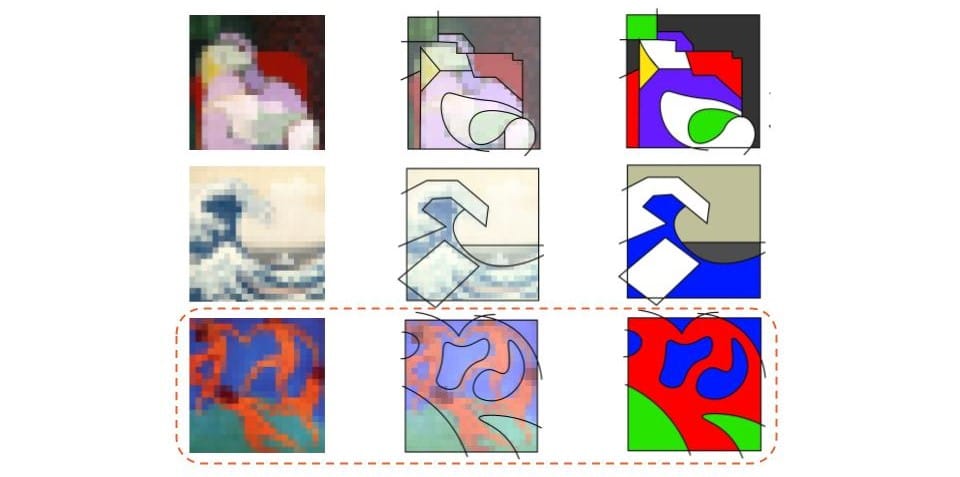
This project investigates the reinterpretation of the traditional mosaic technique of Trencadís through contemporary methods of digital and robotic fabrication. The process began with manual explorations aimed at understanding the material and compositional logic underlying Trencadís—specifically, the principles governing the arrangement and fitting of irregular fragments to generate cohesive surfaces. These initial studies provided critical insights into the spatial and geometric relationships inherent in the craft.
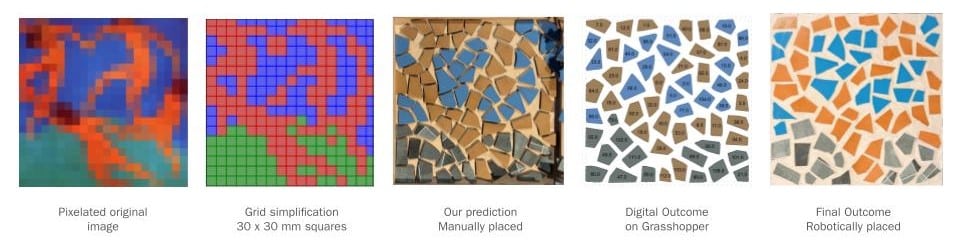
Building on this foundational understanding, the project transitioned into a digital workflow. Individual tile fragments were scanned and processed using Python-based computational tools to extract and refine geometric data. The processed data was subsequently integrated into a Grasshopper environment to develop and simulate the final design intent. The workflow culminated in the robotic execution of the Trencadís pattern, where the precision and repeatability of robotic fabrication were leveraged to reinterpret the expressive irregularity of the manual process. This exploration highlights the potential of combining traditional craft sensibilities with computational design and robotic fabrication techniques to generate novel material expressions.
Manual Exploration
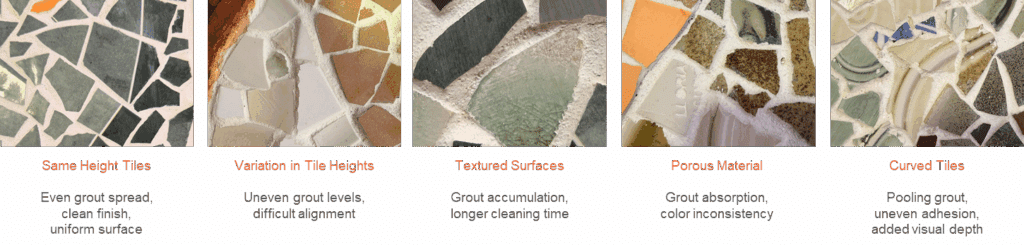
Observations: Manual Exploration
Design Development
Robotic Exploration & Fabrication
Observations
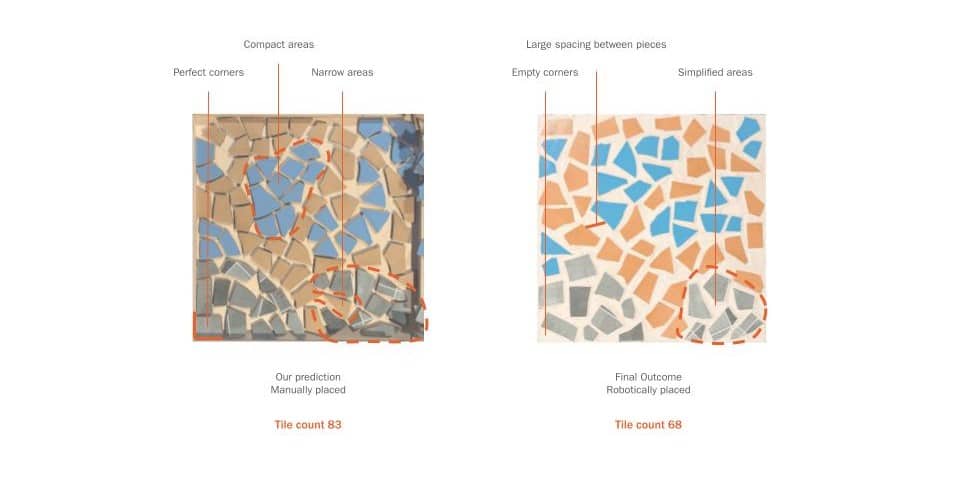
Final Result