Sorting for Salvageable Materials
This course was mainly to understand automated collaborative multiagent systems in different environments. Term’s 3 topic (Human-Machine-Collaboration) is recognized through this course by exploring the possibilities of the processes and us being capable of mapping in different diagrams how we imagine a scenario with an automated procedure.
For this task, we proposed a scenario of sorting materials from a demolition site that can be reused for reconstruction. We chose this topic because as architects, we think that it is important to think on reusing construction materials as much as we can for our projects, and what better than implementing an automated efficient process for it?
The environment we propose within the selected scenario is a non-deterministic environment. This because depending on the demolition site, the area changes and so some randomness is involved on the process. It is also considered as a closed environent since no new agents would enter the system besides the ones we include in the process. It is also a continours-real world environment and it is accessible in scanning since the bots within the automated system would be mapping the area.
Goal: Organizind demolition site by sorting materials

Once we established our goal, we chose which types of agents would help us to reach it. For this, we selected 9 agents and we listed down the description of each one.

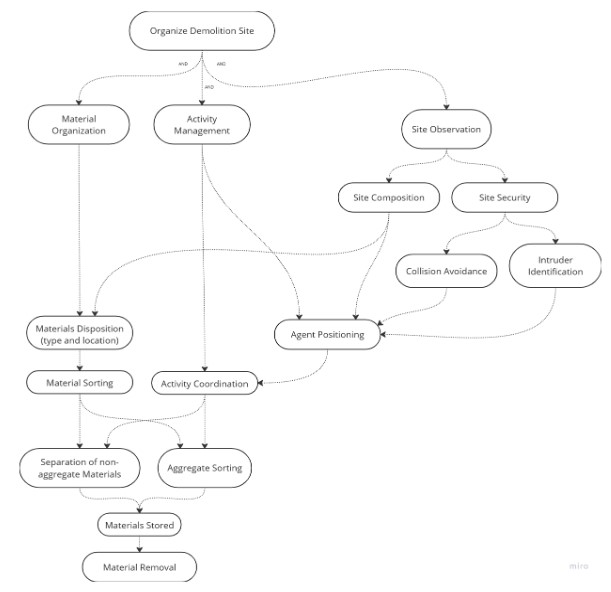
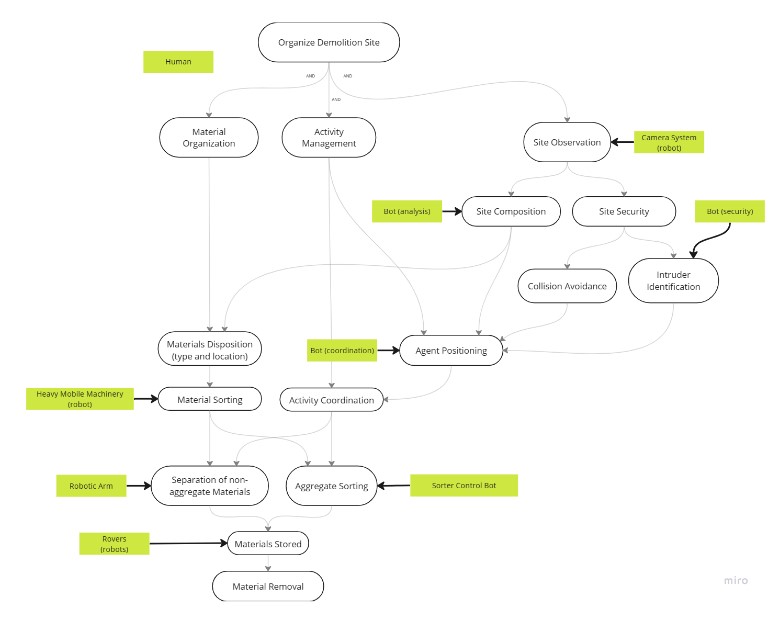
Then we made a diagram which listed the goals we want to achieve in our process. This includes the main goal at the top and is subdivided into smaller goals that are needed to reach the mail one. The map on the left side of the page represents the goals map and the map on the right side is the same map but with the agents involved. This map is important through the process because once the agent with its task is defined, they need to have a goal to make decisions within their own task in order to reach it.
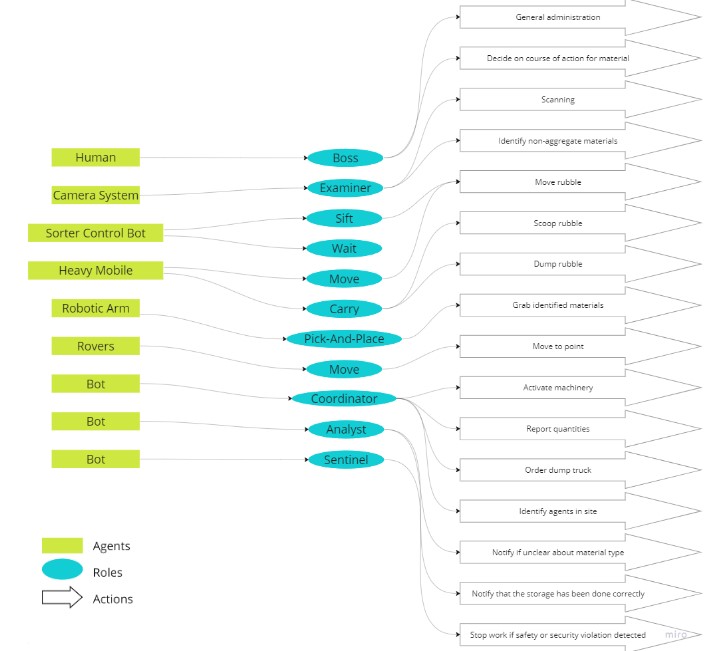
At the time that the agents have a goal, they play a certain role. And within each role there are certain actions that the agent needs to do. The map we created according to our agents, roles and actions is represented on the diagram below:
As every procedure, there are certain norms that the involved part need to follow. At this time, we have named the agents, their roles, their actions, their goals and their overall description. To make sure that they follow their instructions the most optimal way, we decided to include certain norms on the automated process to achieve the best effciency possible. The norms we enlisted for the agents are shown below:
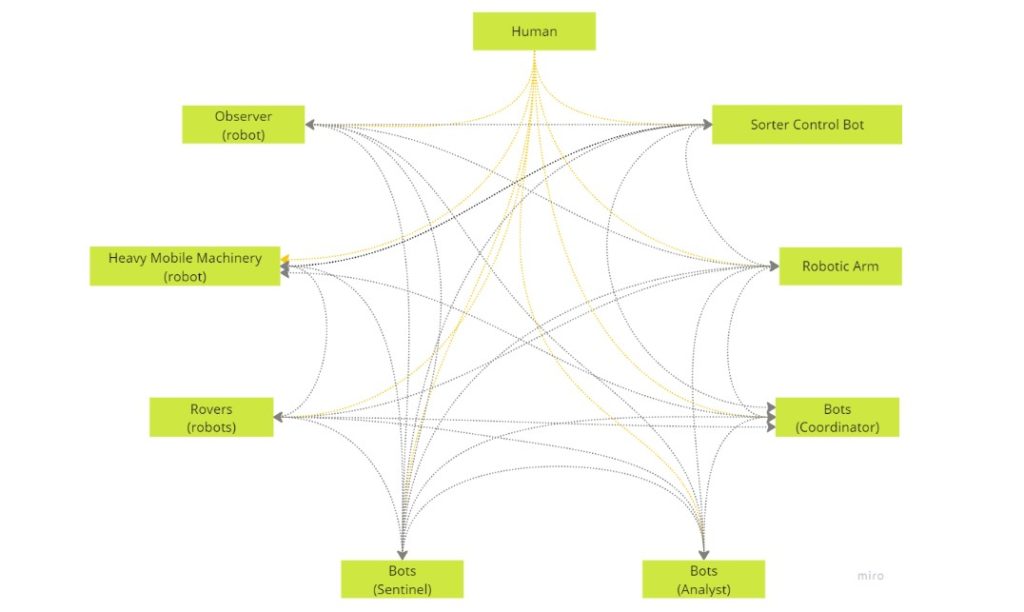
Finally, we decided to map two diagrams which represent the communication between the agents (first diagram) during the overall process and how are they related in order to fullfill their tasks and reach the final goal. The second map is the list of the data bases communications between the agents. They are mapped in order to understand all the important information which is gathered during the process.