
PROJESCT INTRODUCTION
This project is a robot end-effector solution that can carry multiple objects and rotate them at different angles and displacements during a single pick and place motion. The solution solves the efficiency problem of current robotics applications in architectural masonry by outputting the robot’s spatial motion through a grasshopper and picking and placing multiple objects and then using a Raspberry Pi Pico to control the servo motors to rotate each object at a different angle. We chose Ryuichi Sakamoto’s song “Merry Christmas Mr Lawrence” and made a series of design attempts based on its melody. Not only is the design a tribute to the musician, who passed away this year, but it is also a design that explores the possibilities of customisation with this technology.
PROBLEM?Efficiency issues in the application of robots in masonry?
Robots have been used in construction masonry for a long time. It has not been widely popularized due to productivity, cost, and difficulty of application. Through this course, we hope to provide improved solutions for productivity.
Parameterized Brick Wall
Parameterized brick walls as a typical result of robotics applications in construction. Morphologically it allows more interesting designs to get off the ground. However, the current prevalent robotic masonry process uses grippers to simulate the process of manual bricklaying. It is difficult to improve in productivity. Sometimes the time for comprehensive process development, material preparation, testing, and so on. Robot efficiency is lower than handmade labor. The advantage of the current robotic masonry process is only to solve the design and accuracy problems.
Manuel
Manual masonry requires the use of external formwork. Low productivity, uncontrollable accuracy, high labor cost investment.
GRIPPER
Robotic fixtures improve production accuracy and product stability. However, it is also a single pickup brick. There is no significant improvement in work efficiency.




Parameterized Brick Wall Manuel Gripper Multiple rotatable robot end-effector
SOLUTION?Multiple rotatable robot end-effector?
The robot end-effector in this study is many times more efficient than the fixture for the same workflow.
Multiple rotatable robot end-effector?Pre-design?
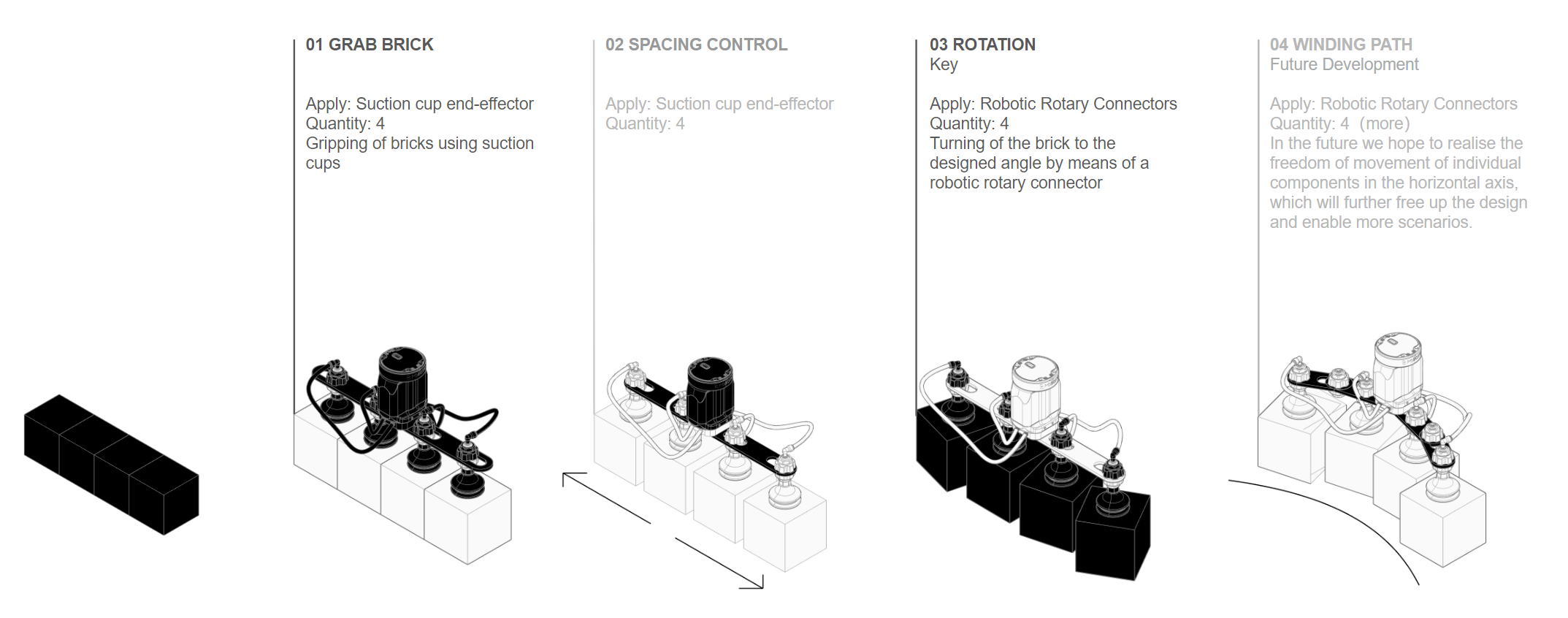
TECHNOLOGICAL LINE
The technical route is divided into four steps. Each step involves different technical points. Each breakthrough in a technical point can lead to a different degree of design liberation.
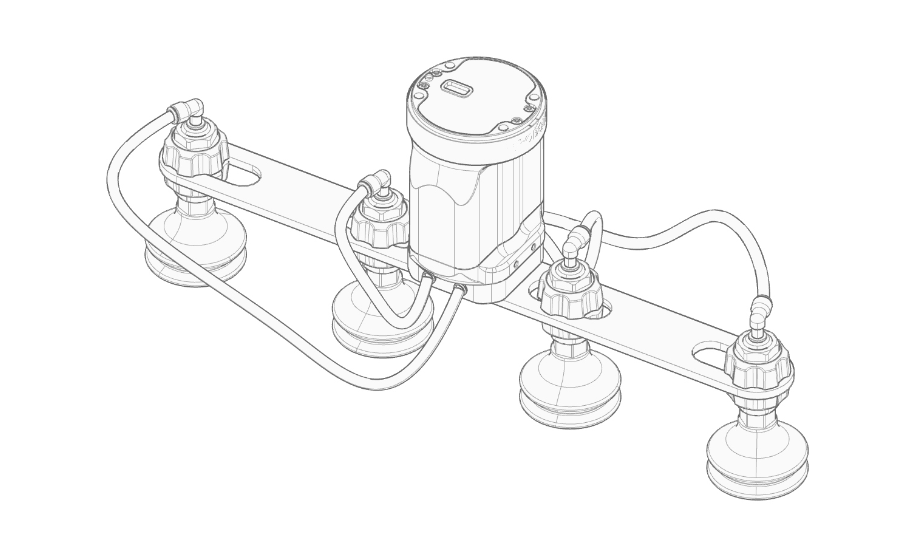
END EFFECTOR
UNITS
Simultaneous gripping of multiple objects with servo motors and rotation at different angles and gripping of cubes with suction cups.Component 3 has an in-built spring to prevent damage to the end-effector, eliminating a certain amount of error and acting as a cushion when the suction cup comes into contact with the cube.
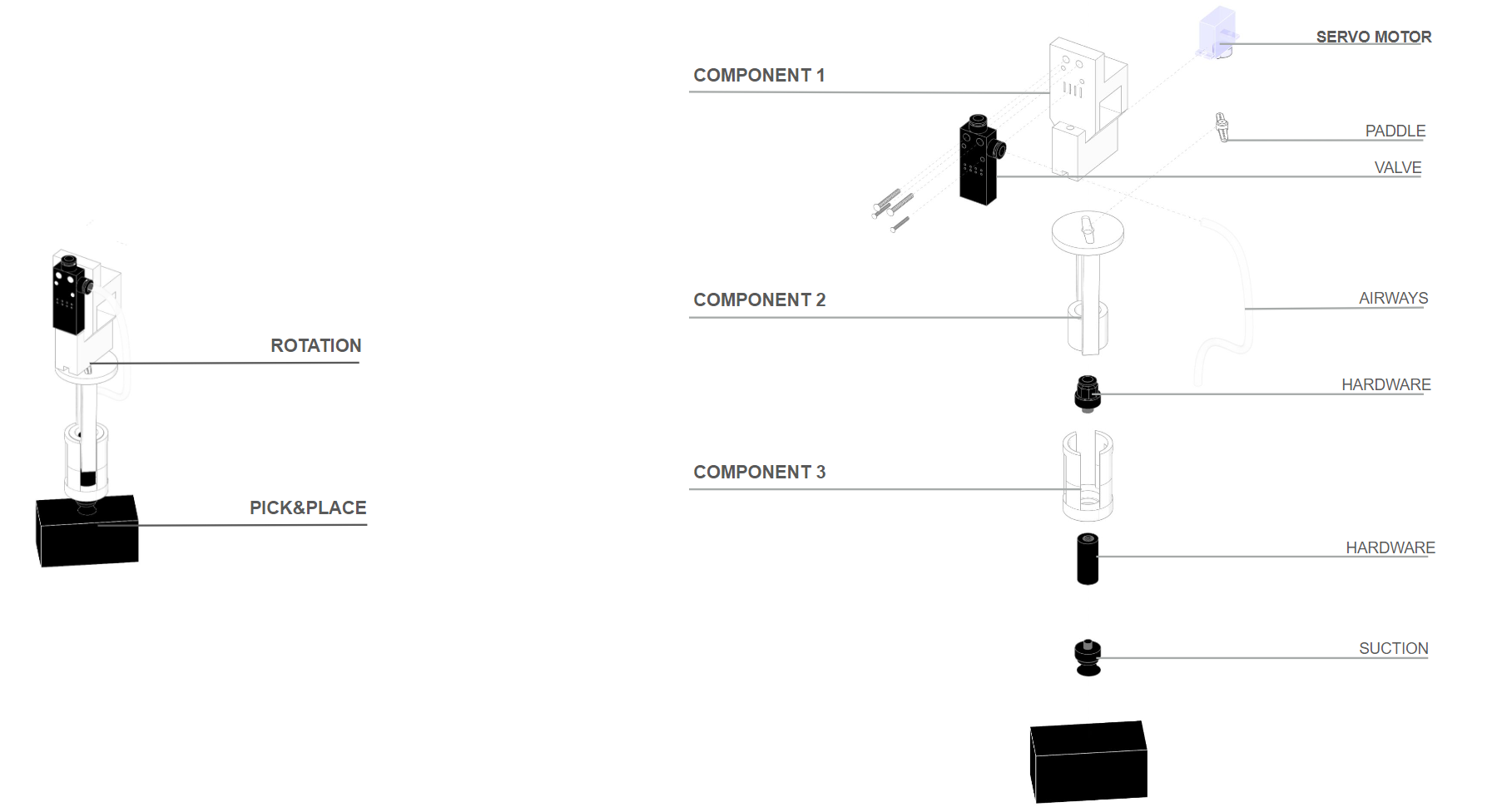
Exploded view of end-effector component
End-effector component motion simulation
COMBINATION AND SIMULATION
We connect and fix the 4 units equidistant by means of aluminium profiles. And write the execution code for the operation of the four servo motors. Finally, it is connected to the robotic arm flange through the 3D printed connectors above. Forming the complete end-effector
Assembling and implementing code
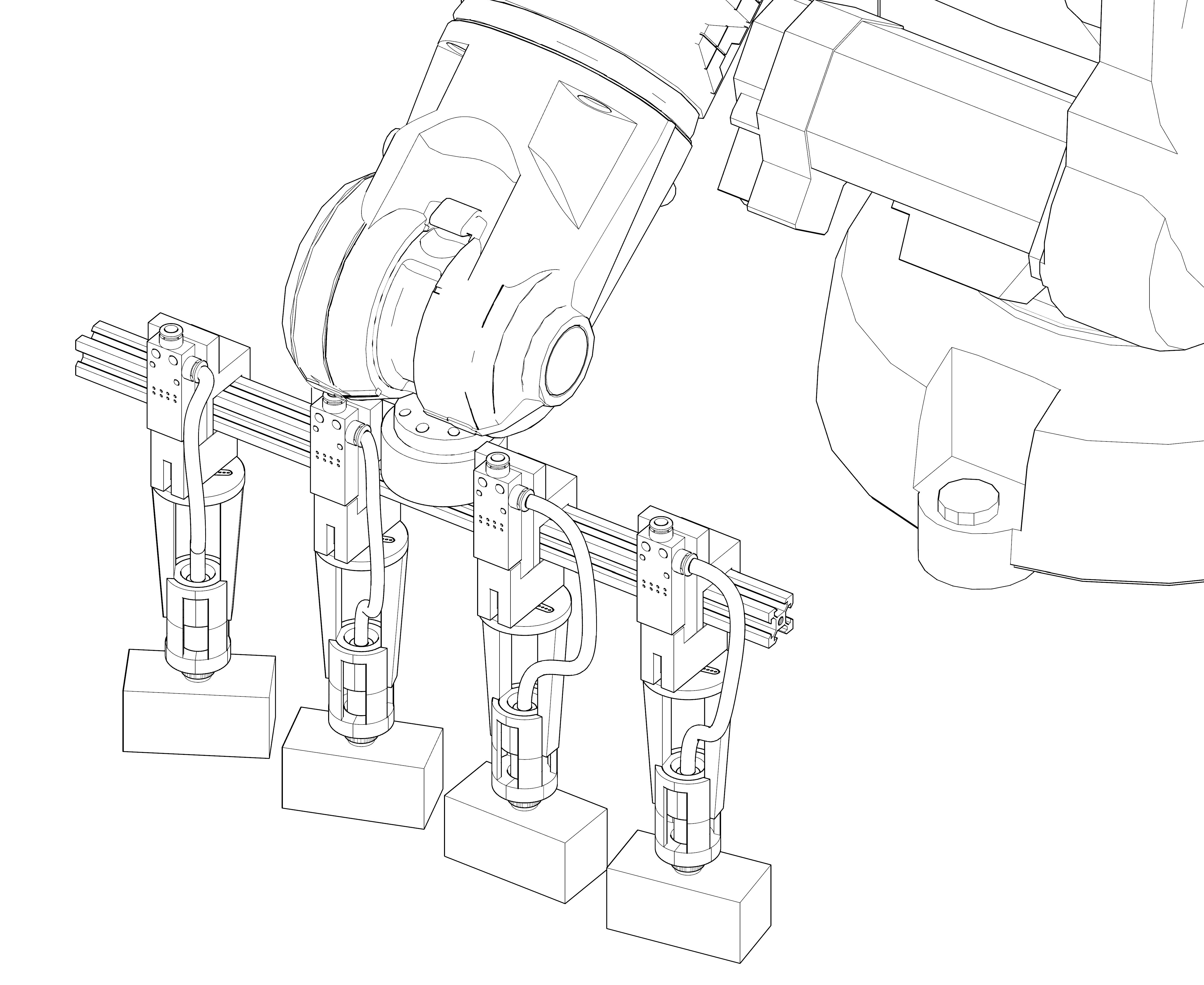
End-effector connection
CIRCUIT
The system will utilise a Raspberry Pi Pico for angular control of servo motors. Rotation at different angles based on the output signal from the grasshopper.

Circuit Schematic Presentation
ANGLE DEFINITON
We define four angles (0°, 10°, 20°, 30°) in the grasshopper by means of 0 and 1 and send signals to the motor to rotate the angles accordingly.
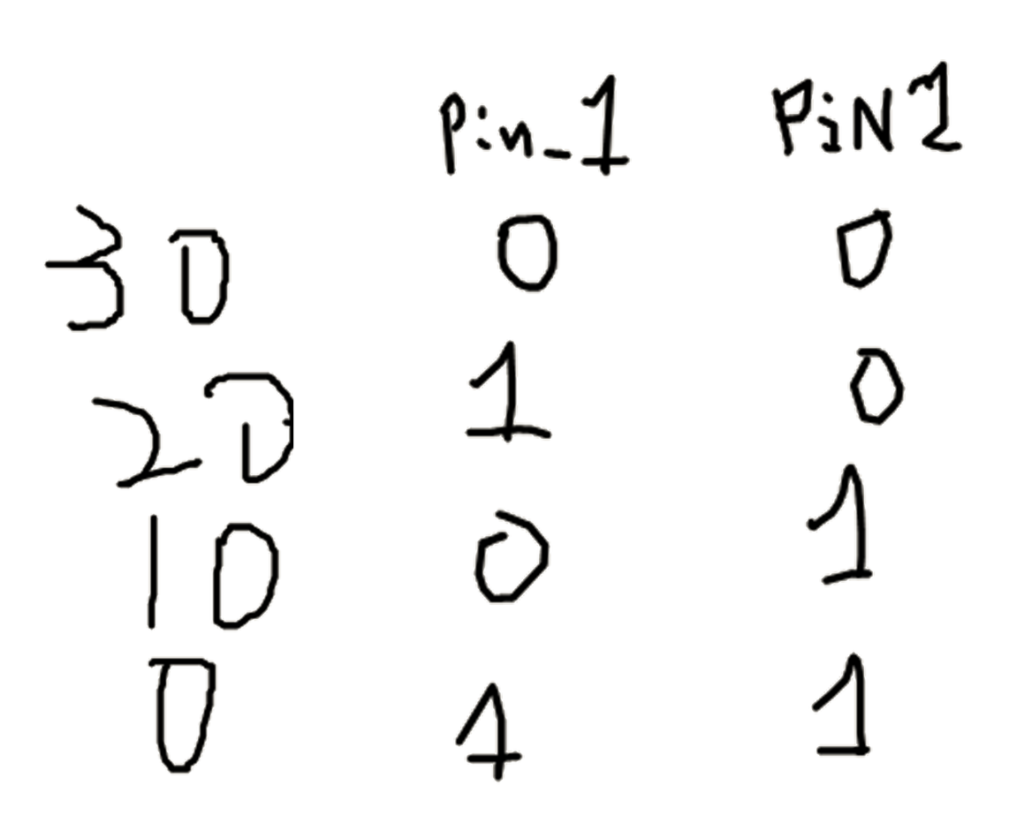
Angle Rule
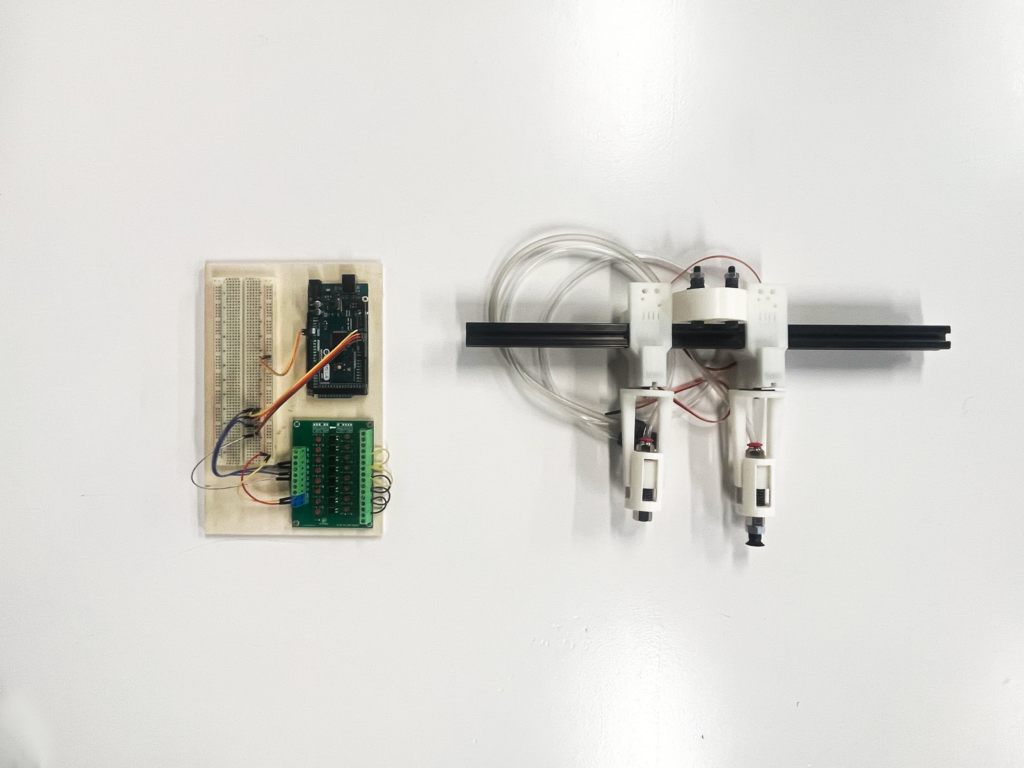
HARDWARE MANUFACTURE
We built the circuit and the end-effector.All things considered, we chose two units of the end-effector for the robot construction. This allows for a more flexible design in a limited space.
DESIGN_The Brick Wall of Songs
Tribute to Ryuichi Sakamoto
Ryuichi Sakamoto was a Japanese composer, pianist, record producer, and actor who pursued a diverse range of styles as a solo artist and as a member of Yellow Magic Orchestra (YMO). With his bandmates Haruomi Hosono and Yukihiro Takahashi, Sakamoto influenced and pioneered a number of electronic music genres.
Unfortunately this musician left us this year. So we wanted to honor him and each of his notes in a special way. In this coming Christmas.
Selected representative works of Mr. Ryuichi Sakamoto’s life – Merry Christmas Mr. Lawrence We convert the audio waveform visualization into a brick rotation angle.
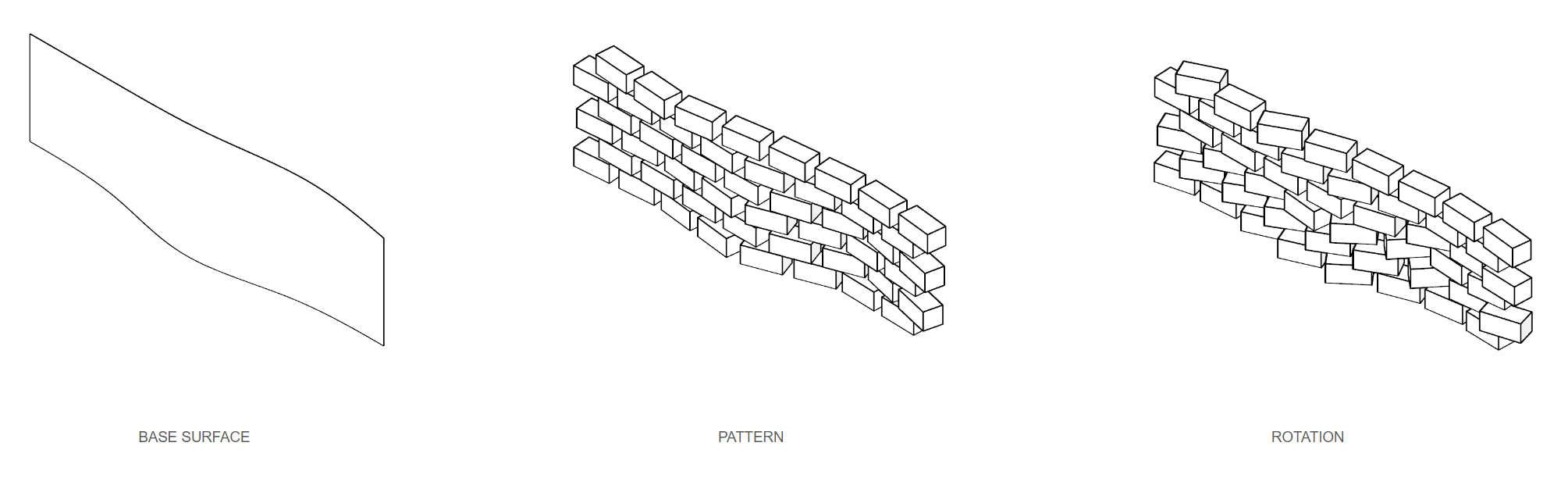
ROTATION ANGLE INTERFERENCE
We translate the range of the audio into the angle of rotation of the cube


Pattern Rotation
We transformed the audio into a data structure based on the absence of fluctuations and notated the music with a rotation of the cube.
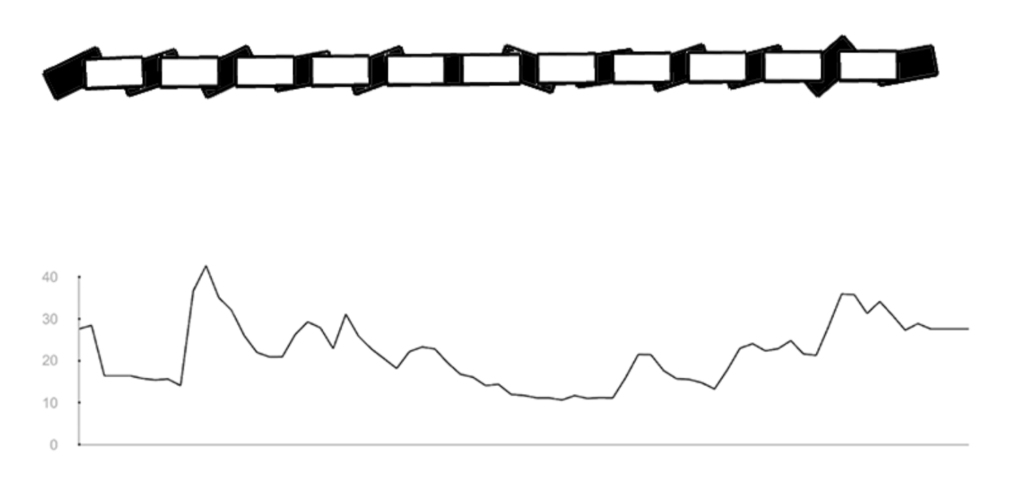
Layer 1 audio interference
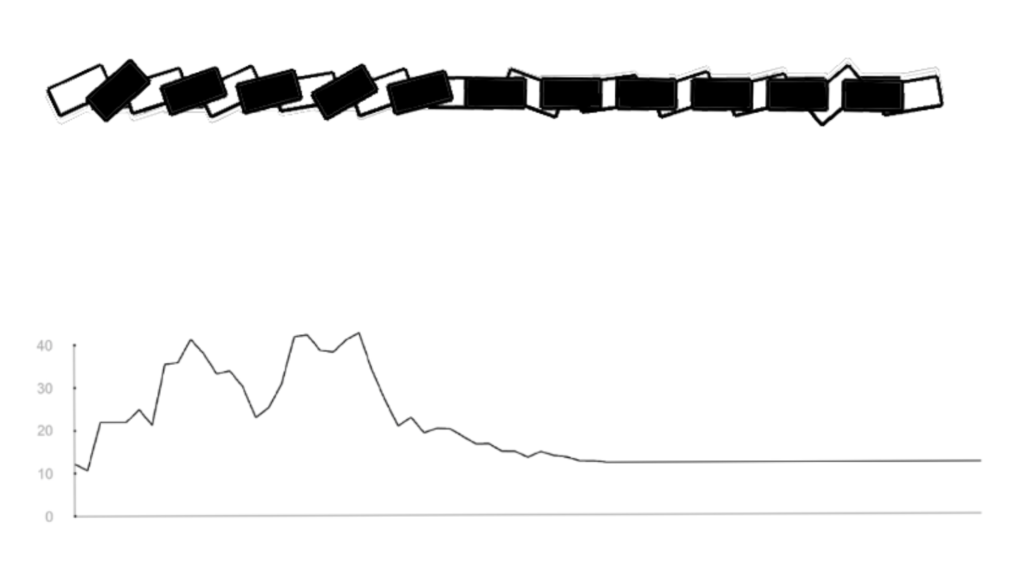
Layer 2 audio interference
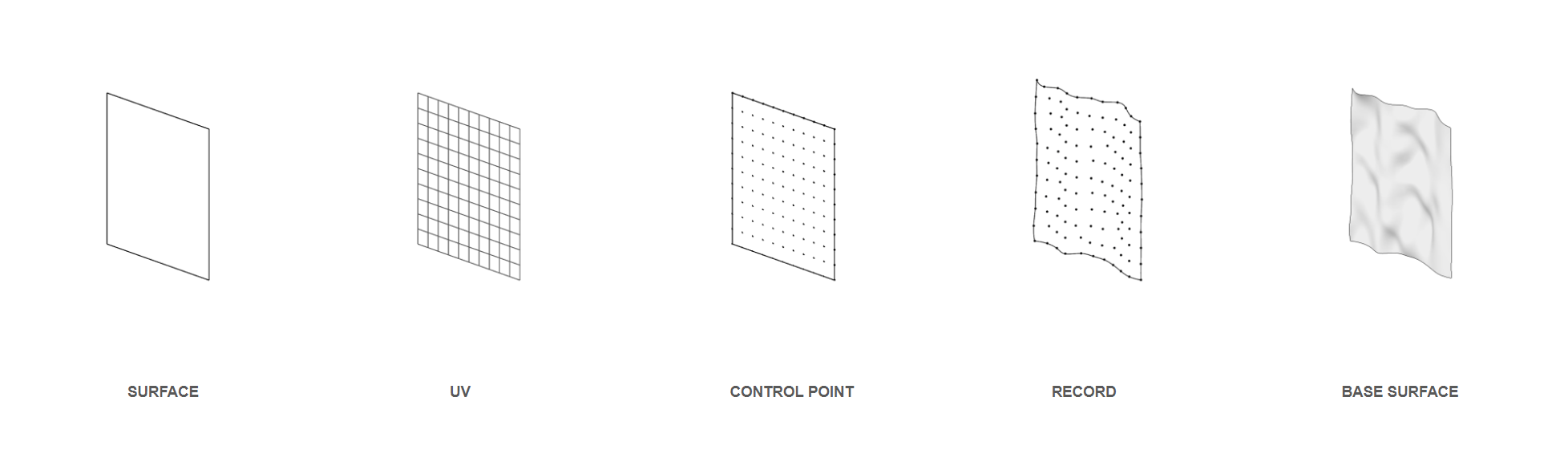
BASE SURFACE
We extract the UV points of the surface. Using the same data these points are translated and then horizontally connected to a line. Finally Loft them to get the base surface of the recorded melody.
TEST SECTION
We have taken a part of the model and put it into practice to demonstrate the feasibility of the technology.
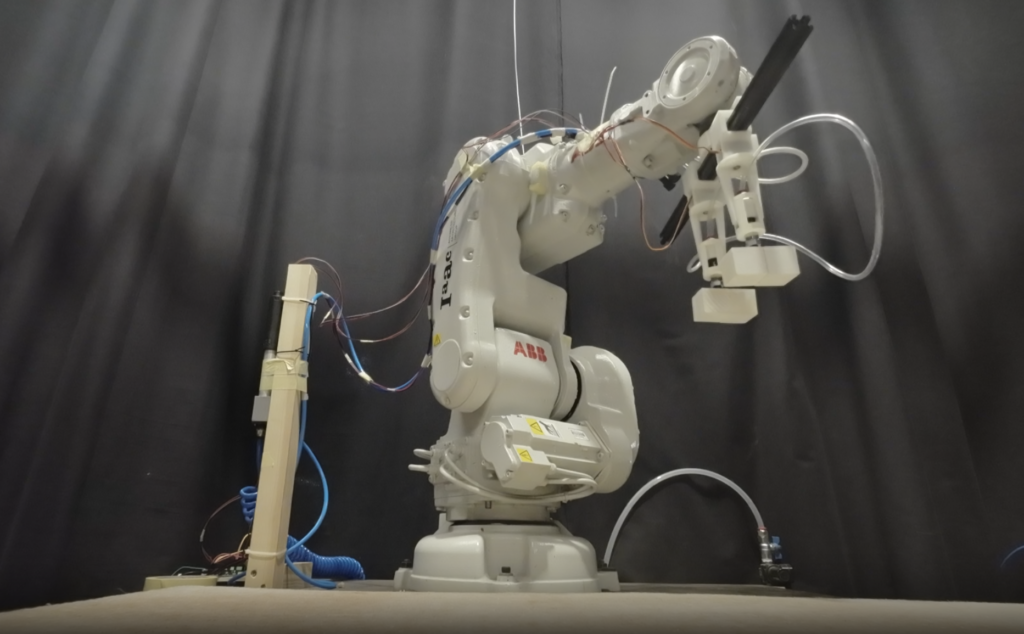
INTEGRATED APPLICATION
In the end we simulated and practiced this technology on an ABB robot.The feasibility and future potential of this technology was also demonstrated. This could be a key productivity improvement in robotic brick and masonry work. It is innovative in this field. But if well realised it needs more in-depth research.
VISUAL MEDIA
This media dynamic expresses our ideas and part of our working process
