
Workshop 3.1: Material Intelligence
Workshop UAL@IAAC
TEAM: IAAC Leonard Elias Böker | Carpenter/Designer
IAAC Janny Zhang | Architecture
IAAC Elias El Asmar | Architecture
IAAC Sam Holcombe | Architecture
UFG Moritz Aigner | Design Technologist
UFG Christina Kraxberger | Architecture
Material Intelligence is a cross-collaborative workshop between IAAC*, TALM** and Linz*** as part of a EU funded scheme, SCALExD:
SCALExD is a European initiative aimed at training a new generation of “digital” craftsmen—emerging designers, artists, and architects—through the development of an interdisciplinary educational program at the crossroads of art, design, architecture, and engineering” ~ https://scalexd.eu/
Through a shared central project of a 1:1 prototype column students addressed and learned ideas of material investigations, digital twin scanning and using two robots collaboratively at the same time. This was split between manually mixing and placing material such as bricks and mortar as well as engaging with the avante-garde robotic software workflows such as PRC (Parametric Robot Control) with the creator of the software Johannes Braumann. At the same time we worked in groups to design an alternative column system for future workshops.
1:1 PROTOTYPE



With a team led by Marta Rota we mixed mortar and layed the foundations for our columns. Additional mix was then prepared for each layer and applied for the robot to lay bricks.
With a team then led by Martin Schwab we then took photogrammetric digital twin of the column layer by layer. If bricks were slightly moved or the column deviated from the expected path the system was able to adapt.
At the same time a team led by Johannes Braumann organised two ABB6700. One had a pneumatic gripper to pick up and move bricks whilst another had a trowel attached as an end-effector to smooth mortar before placing the next layer.
ALTERNATIVE COLUMN SYSTEM
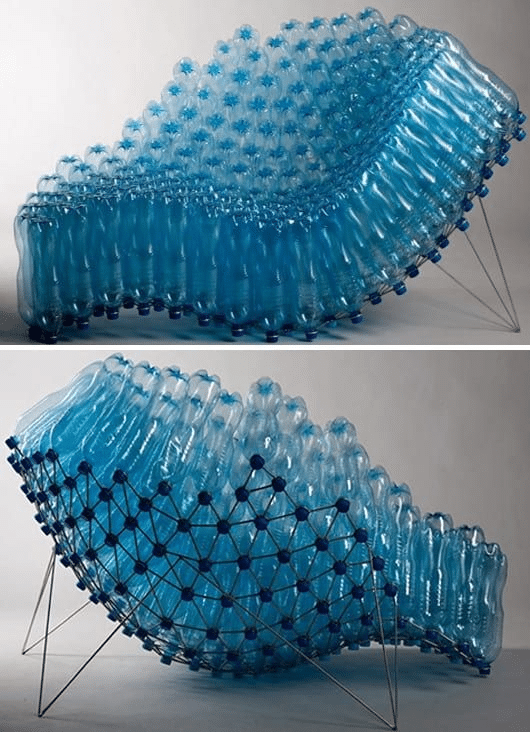
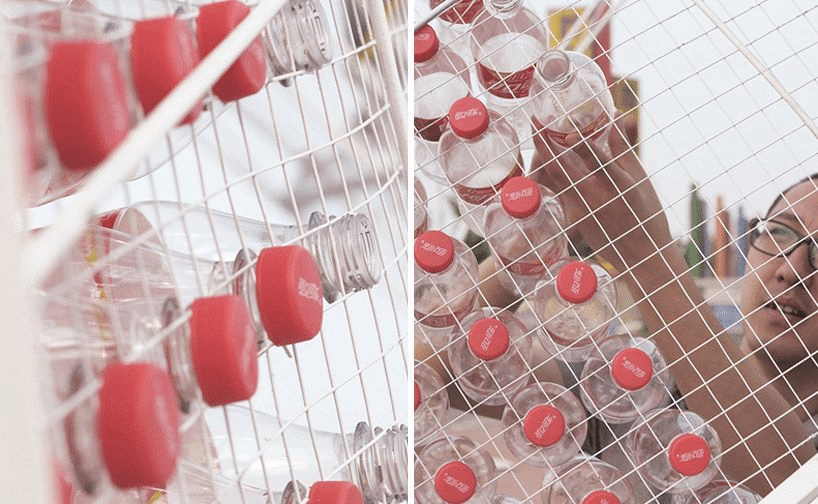
When discussing materiality, the conversation centred on what materials in Barcelona are wasted in the city, which in comparison to our own cultures led to the discussion of Pfand Systems around Europe. Pfand or deposit in German is a concept where consumers pay a small fee when purchasing bottles which encourages them to return to collection points after to receive back. In Barcelona however, there is no system and it is difficult to even find plastic recycling points in the city despite we find ourselves in a global ecological crisis and the city has a well-developed waste management scheme. We wanted to combine this with a de constructable metal structure for our column so as to create a temporary ephemeral object which would highlight this issue.

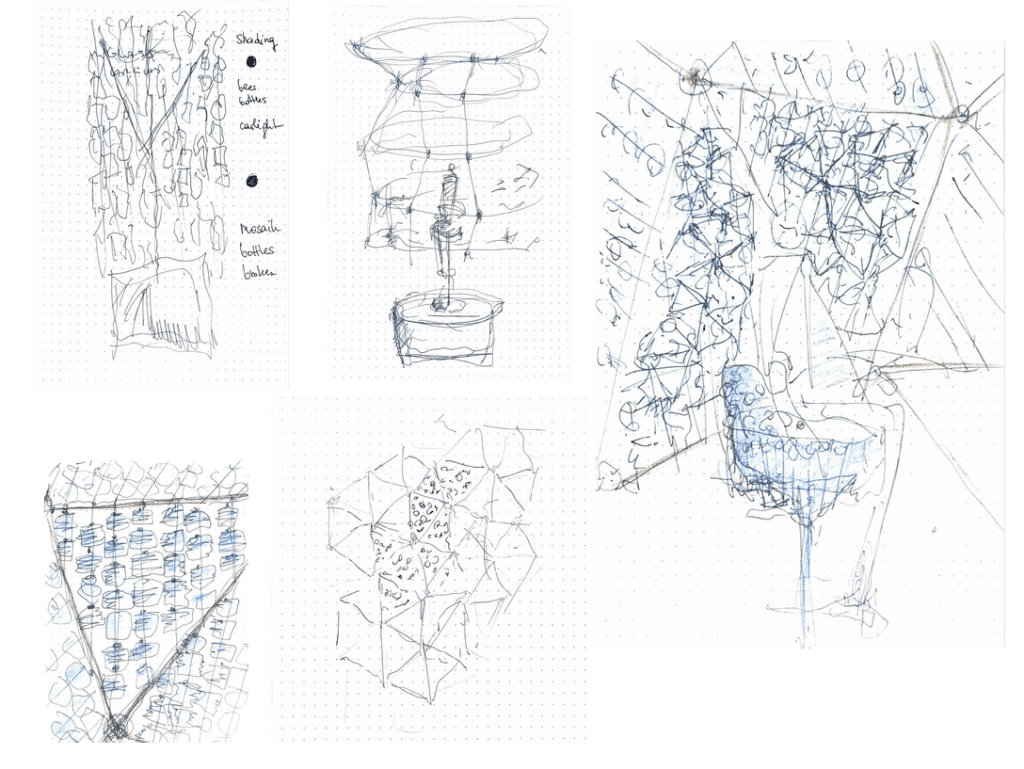
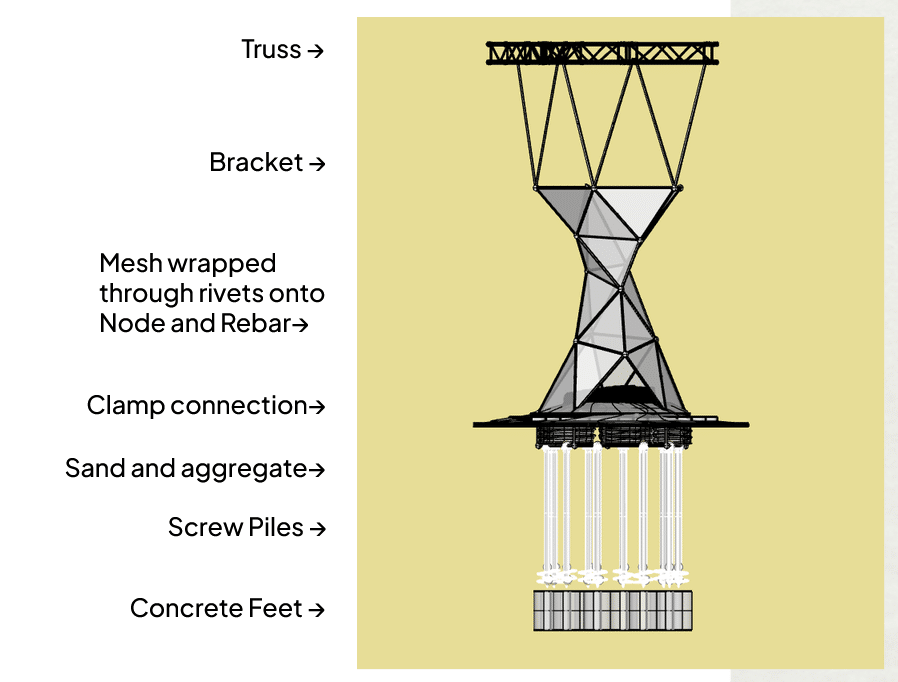
For structural intergrity as a tensile column we used a triangulated mesh skin where the bottles could placed through and then secured with their own caps minimising the need for extra materials as a joint system. From these initial sketches this was then translated into a digital model with grasshopper.
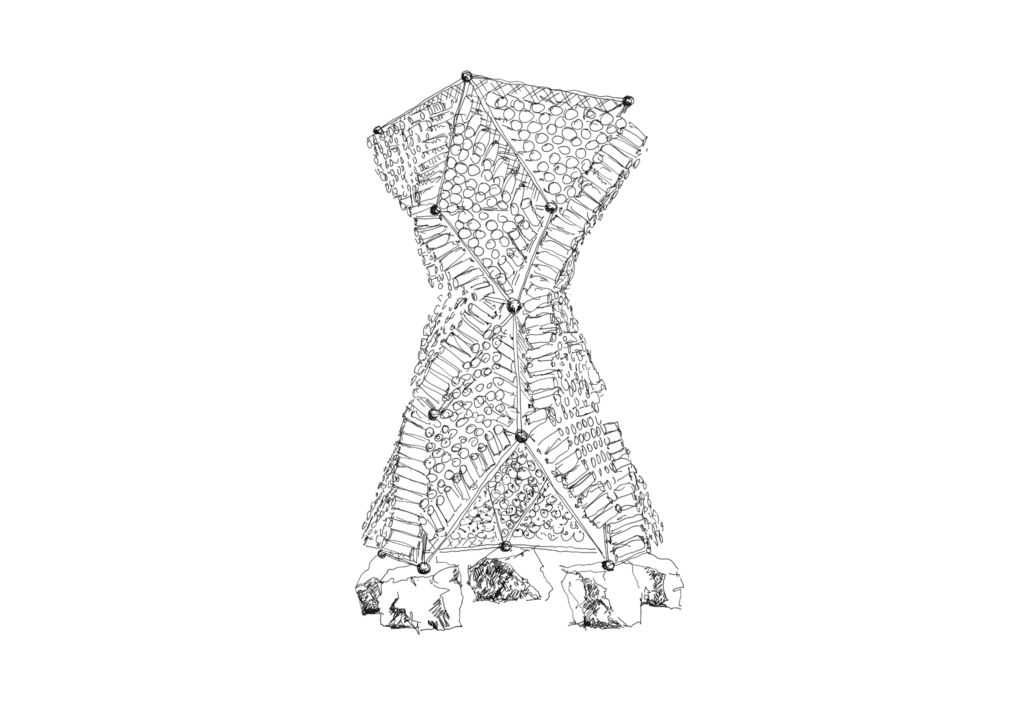
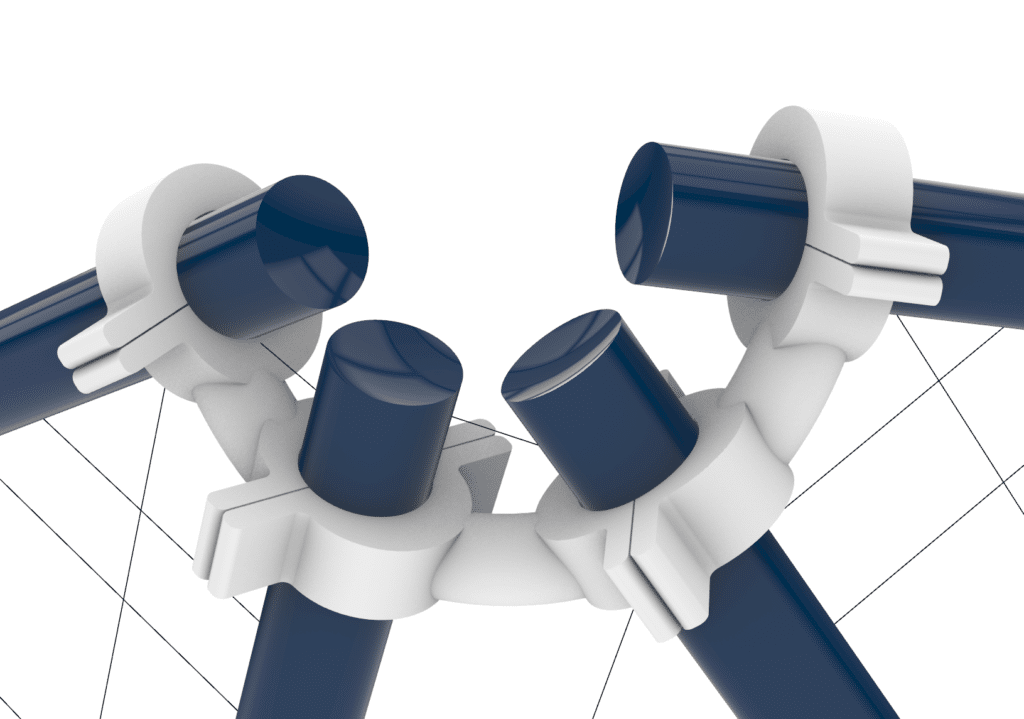
With the digital twin evolved we then discussed how this would need to be articulated as a real object to construct and de-construct easily. Using old scaffolding poles we investigated how this would be clamped together using scaffolding brackets. Also considering if the design had to withstand harsher weather conditions or became a more permanent structural member as a system how this could be given a serious substructure and cap/ bracket to join onto a truss structure roof system.
Finally we proposed how the robot could be used in this system with a colour scanning process to map an exact design and then pick and place in collaboration with a human to screw the caps on. This simulation shows an ABB6700 like we used in the workshop following a path developed in PRC.
FINAL RENDERS



The workshop was led by:
Marta Rota – Architect and sustainability consultant – Linz
Martin Schwab – Engineering and materials expert – Linz
Johannes Braumann – Professor and robotics specialist – Linz
Pit Siebenaler – Robotics faculty specialist – IAAC
*Institute of Advanced Architecture of Catalonia, **École Supérieure d’Art et de Design TALM, ***Kunstuniversität Linz
