CIRCUIT – Hardware II Project
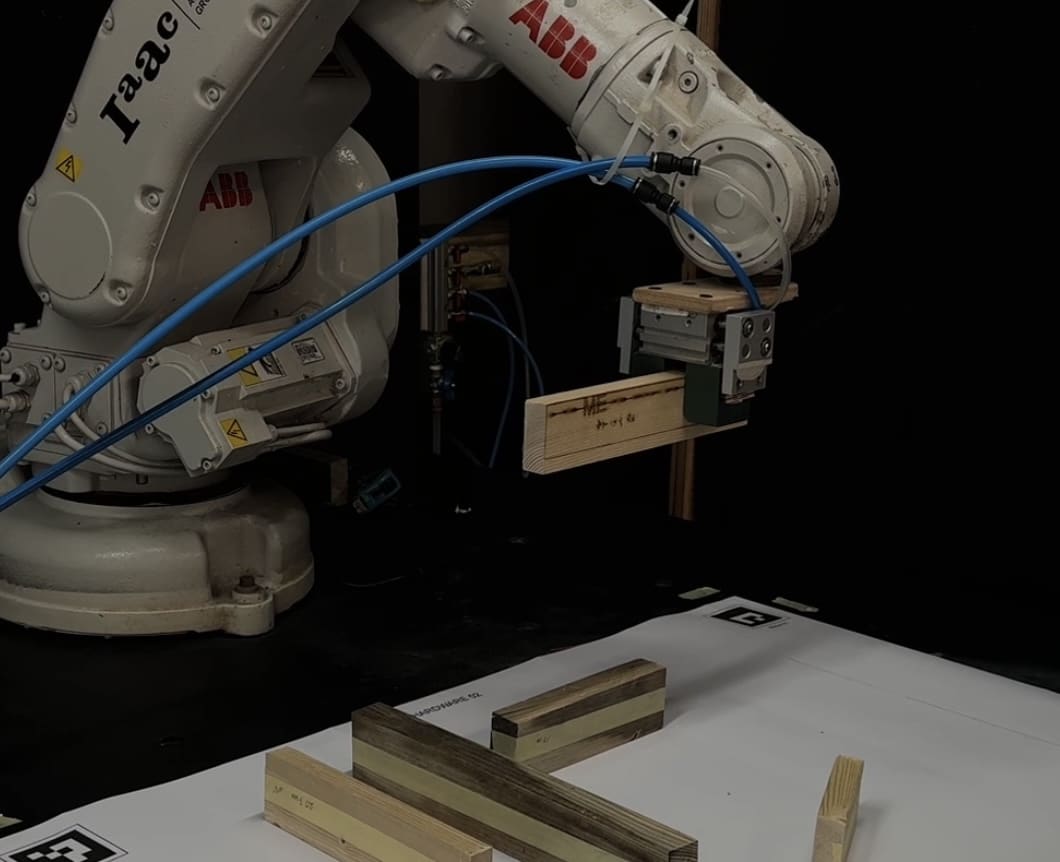
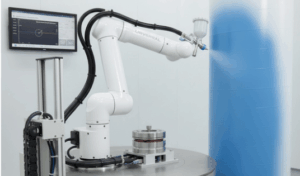
Circular Intelligence for Robotic Classification & Upcycling of Industrial Timber How can robotic system identify, measure and sort reusable construction materials based on predefined constraints? This project proposes a vision-guided robotic system for supporting the reuse of construction materials through automated detection, analysis, and manipulation. A fixed RGB camera in an eye-to-hand configuration observes a … Read more