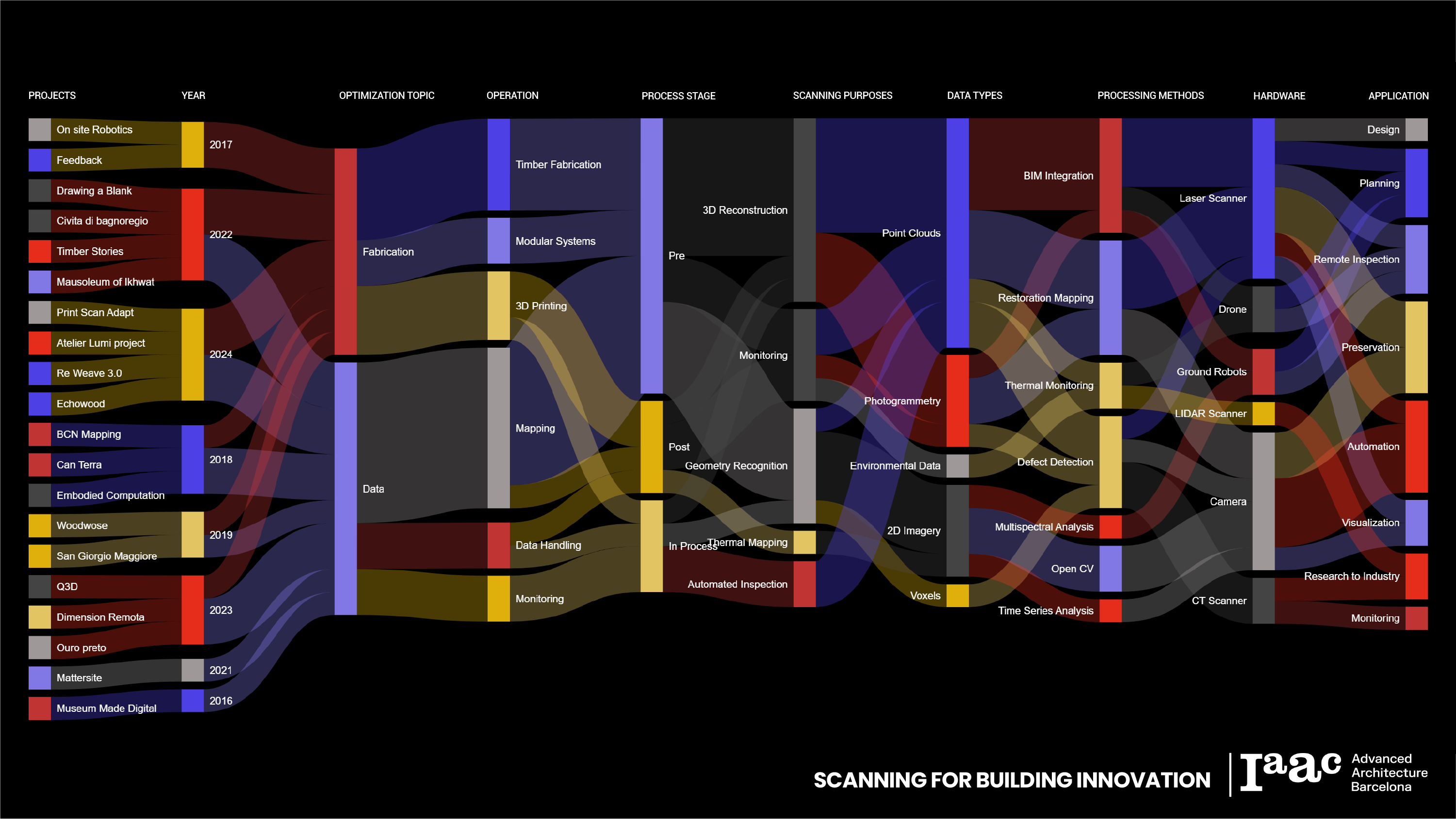
Smart Waste Management
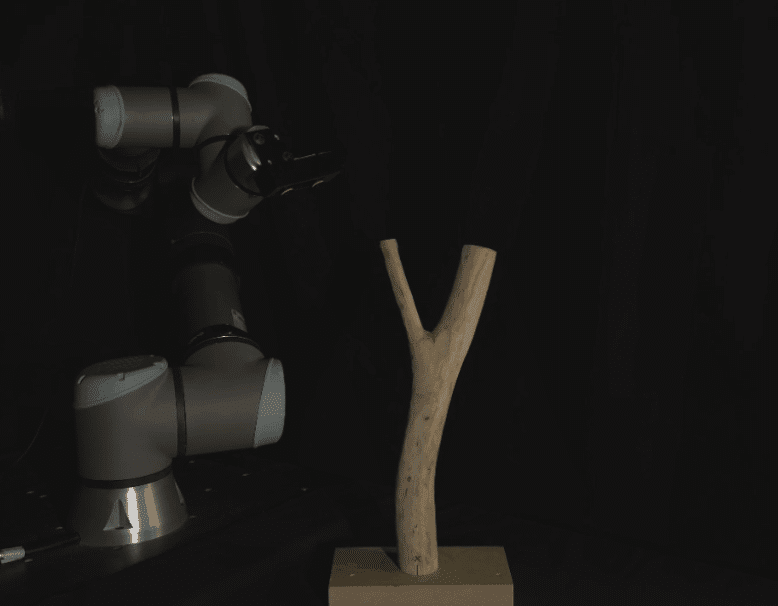
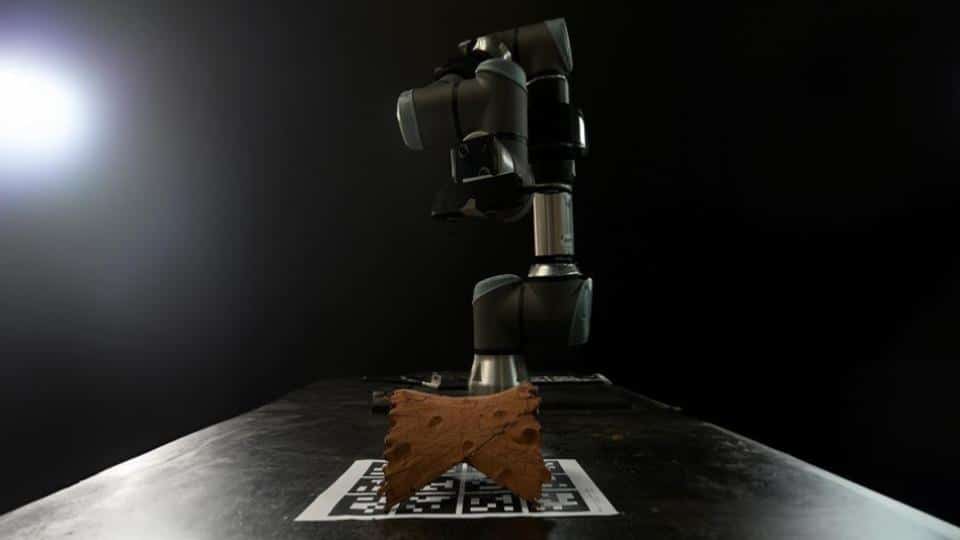
Mobile Robotic Scanning & Discrete Element Analysis This workshop served as an introduction to mobile robotics for scanning. We explored various types of mobile robots and different kinds of sensors, focusing on how they integrate with one another to enable diverse scanning approaches. Based on these investigations, we designed a specific scanning methodology suited to … Read more