
The 3-axis robotic arm project represents an exploration into the realms of robotics, automation, and mechatronics. At its core, the project aims to develop a versatile and precise robotic arm system with three degrees of freedom. The initial prototype, equipped with servo motors as actuators and an Arduino as the central processing unit, demonstrates the fundamental principles of kinematics and control systems.
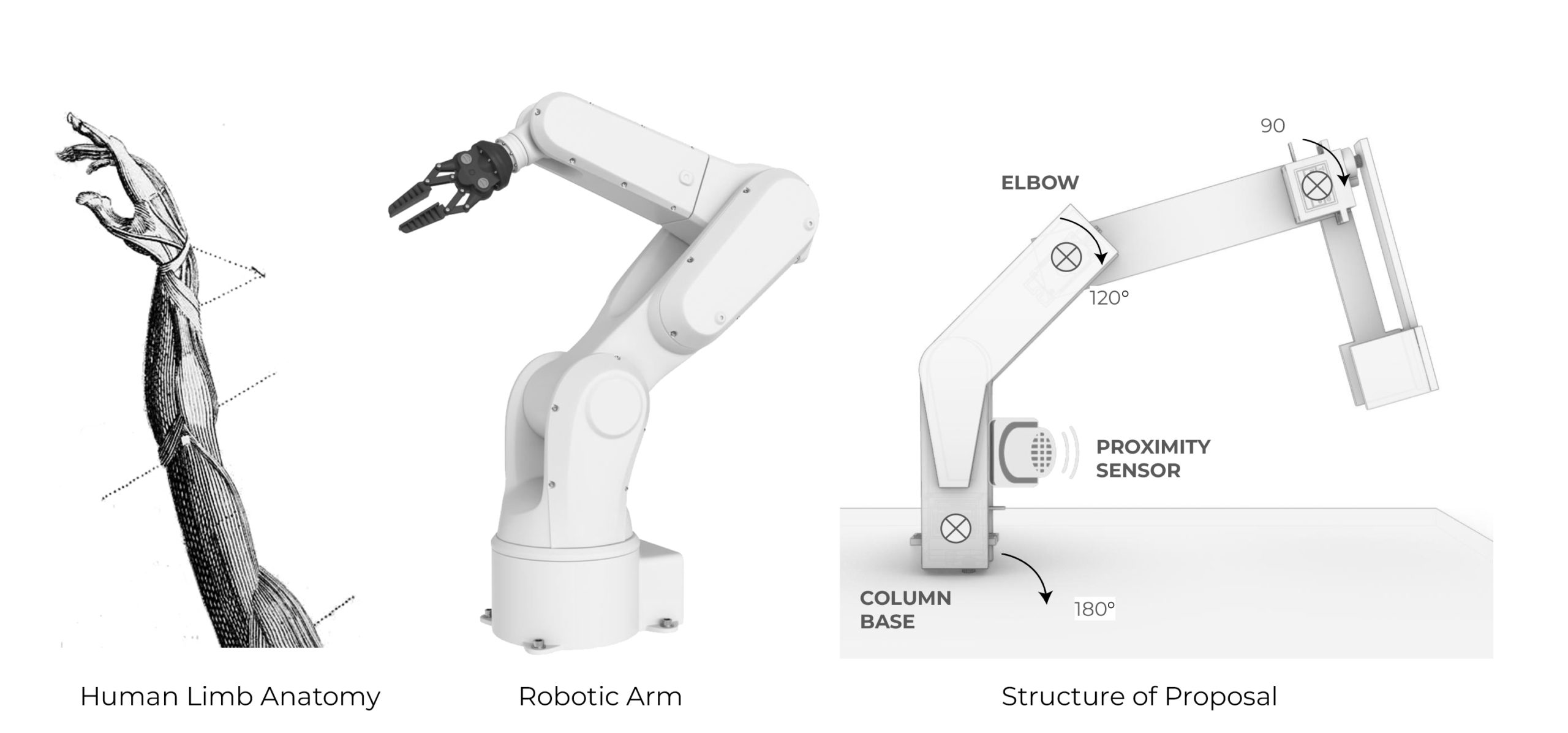
The arm’s structure, inspired by human limb anatomy, leverages multiple joints for increased flexibility and dexterity. The incorporation of servo motors facilitates controlled and programmable movements at each joint, enabling the arm to navigate its surroundings with precision. The system’s architecture, managed by an Arduino micro controller, orchestrates motor movements through a joystick control system to achieve specific positions and orientations while the ultrasonic sensor facilitates safety parameters.
CONCEPT
Akin to human limbs, they are anchored to a base and feature multiple joints as axes, enabling diverse movements. The arm’s agility escalates with more rotary joints.
This multi-jointed structure mimics human dexterity, employing servo motors as actuators for controlled joint movement. Arduino serves as the central processing unit, directing and programming precise motor movements, ensuring exact control over the arm’s position and orientation.
This project delves into the exploration of kinematics, dynamics, and control systems in the realm of robotic arm design.
IDEATION – IN A GLIMPSE
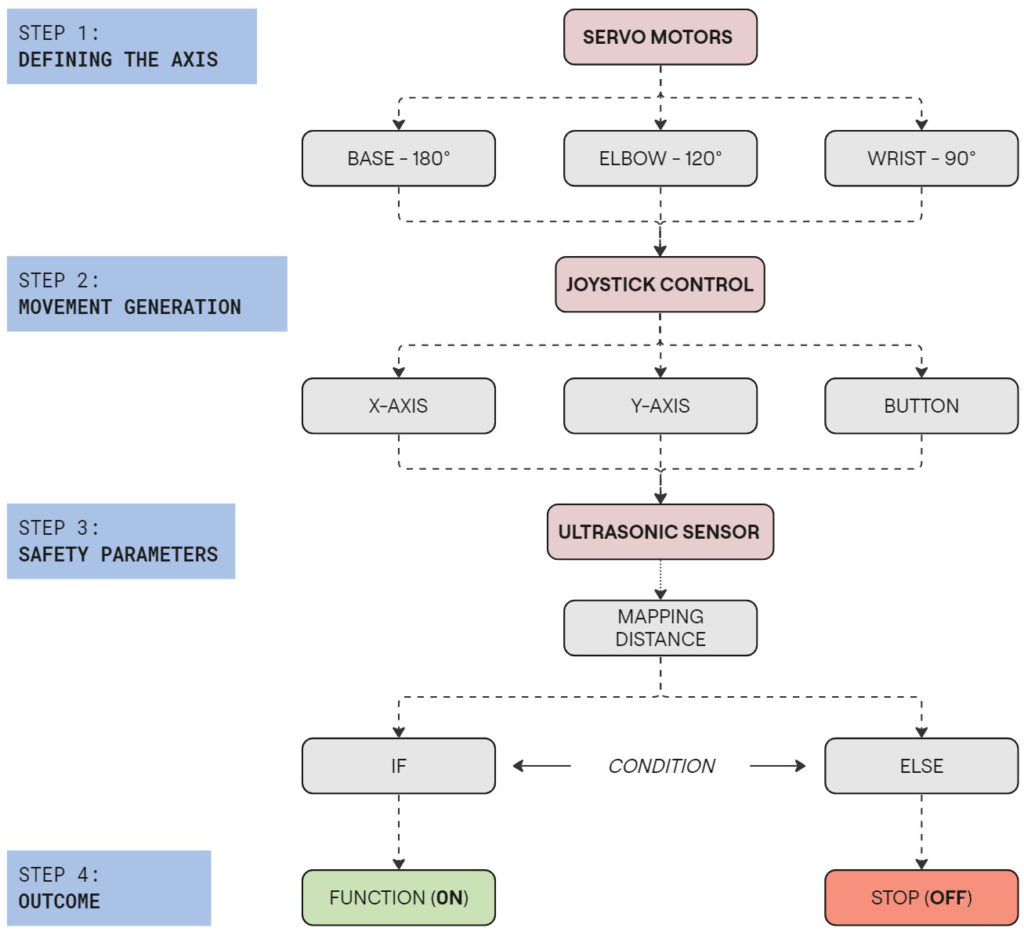
PSEUDOCODE – APPROACH
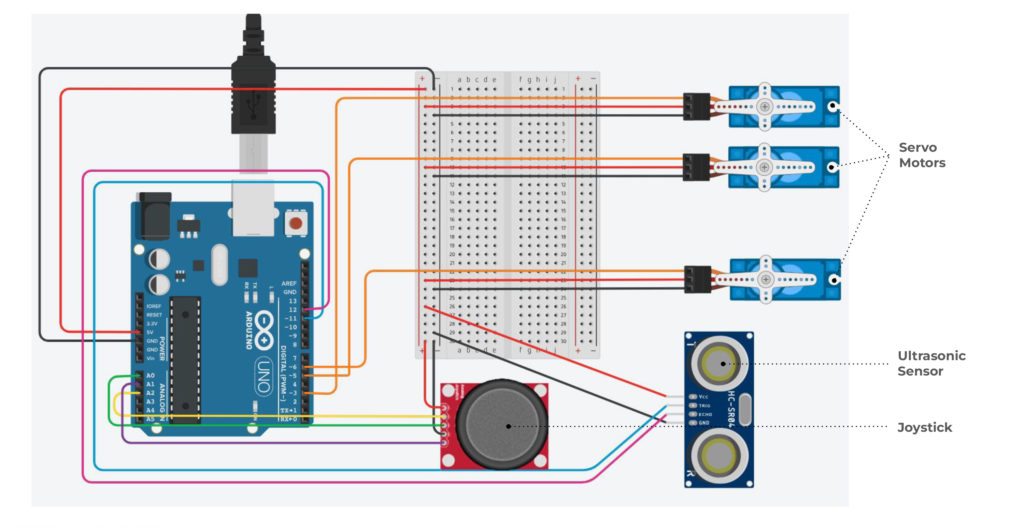
SCHEMATIC OF CIRCUIT – USING ARDUINO
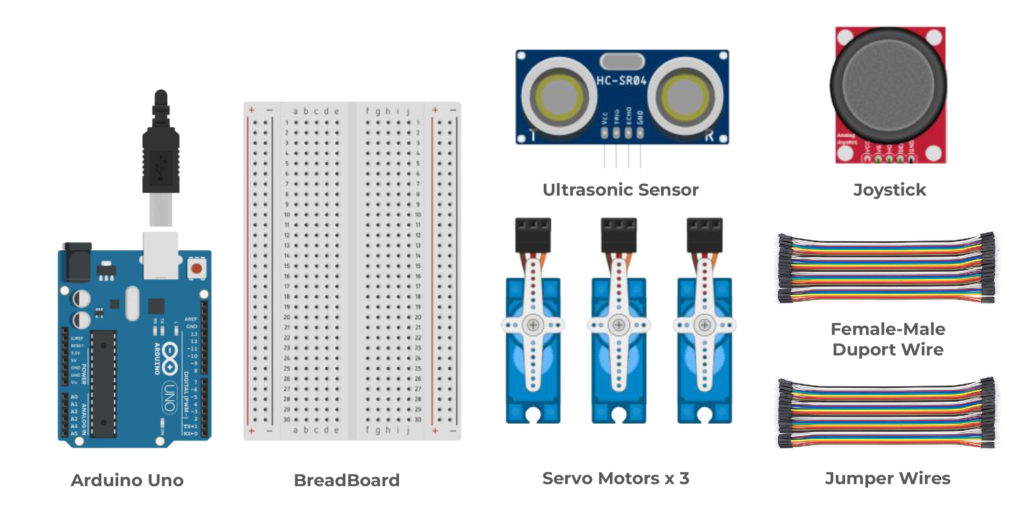
BILL OF MATERIALS (BOM)
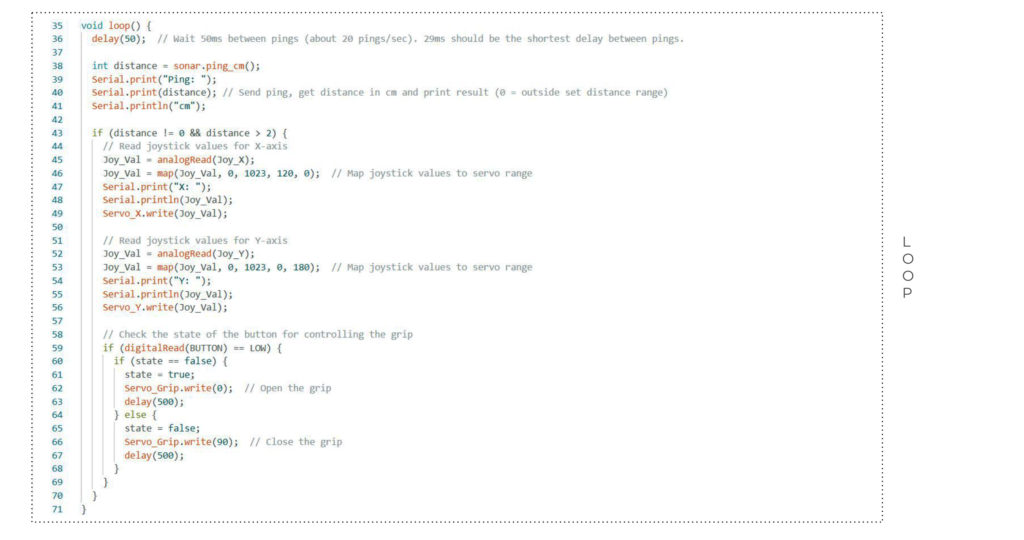
CODE

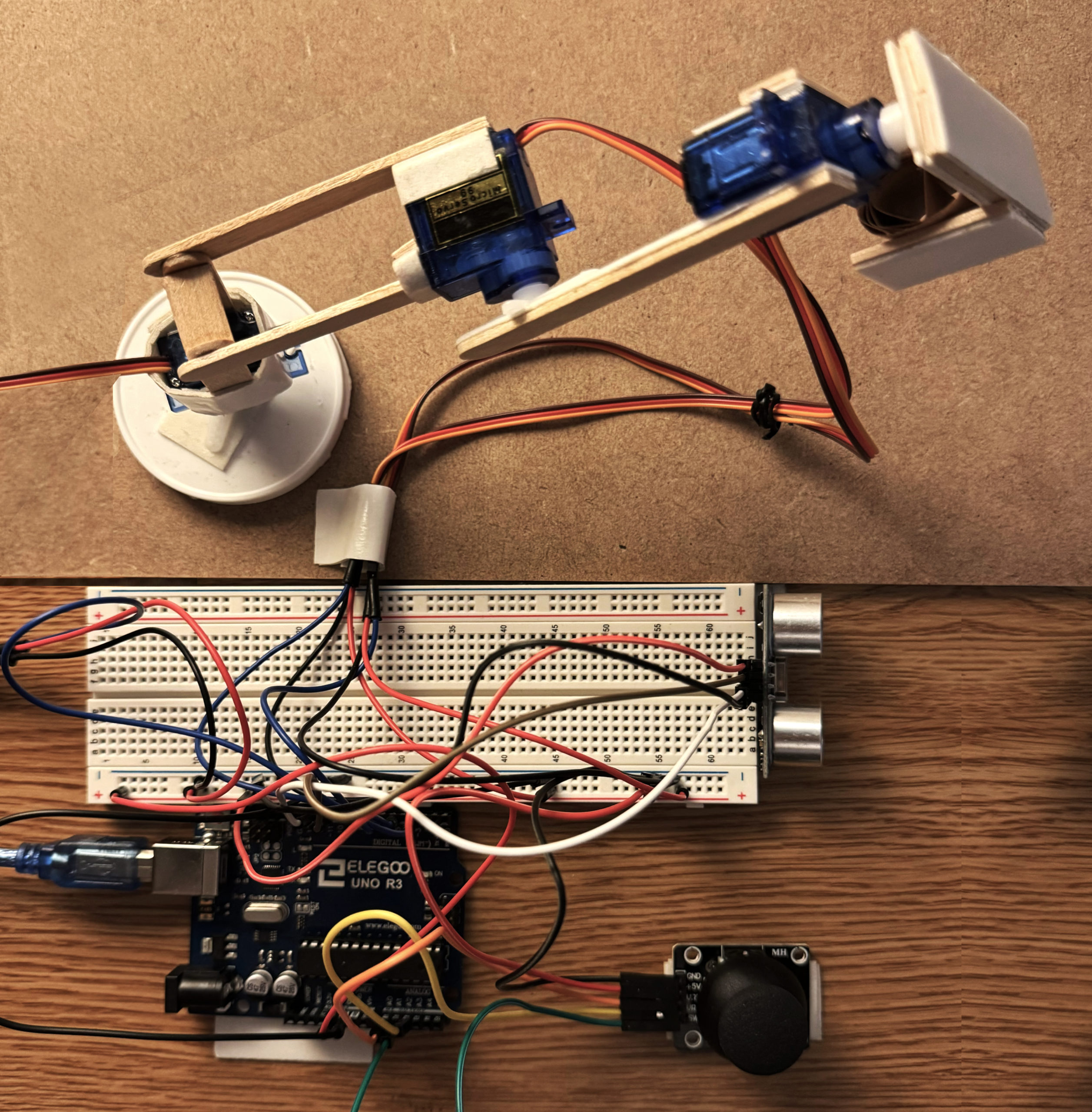
PROTOTYPE
VIDEO
