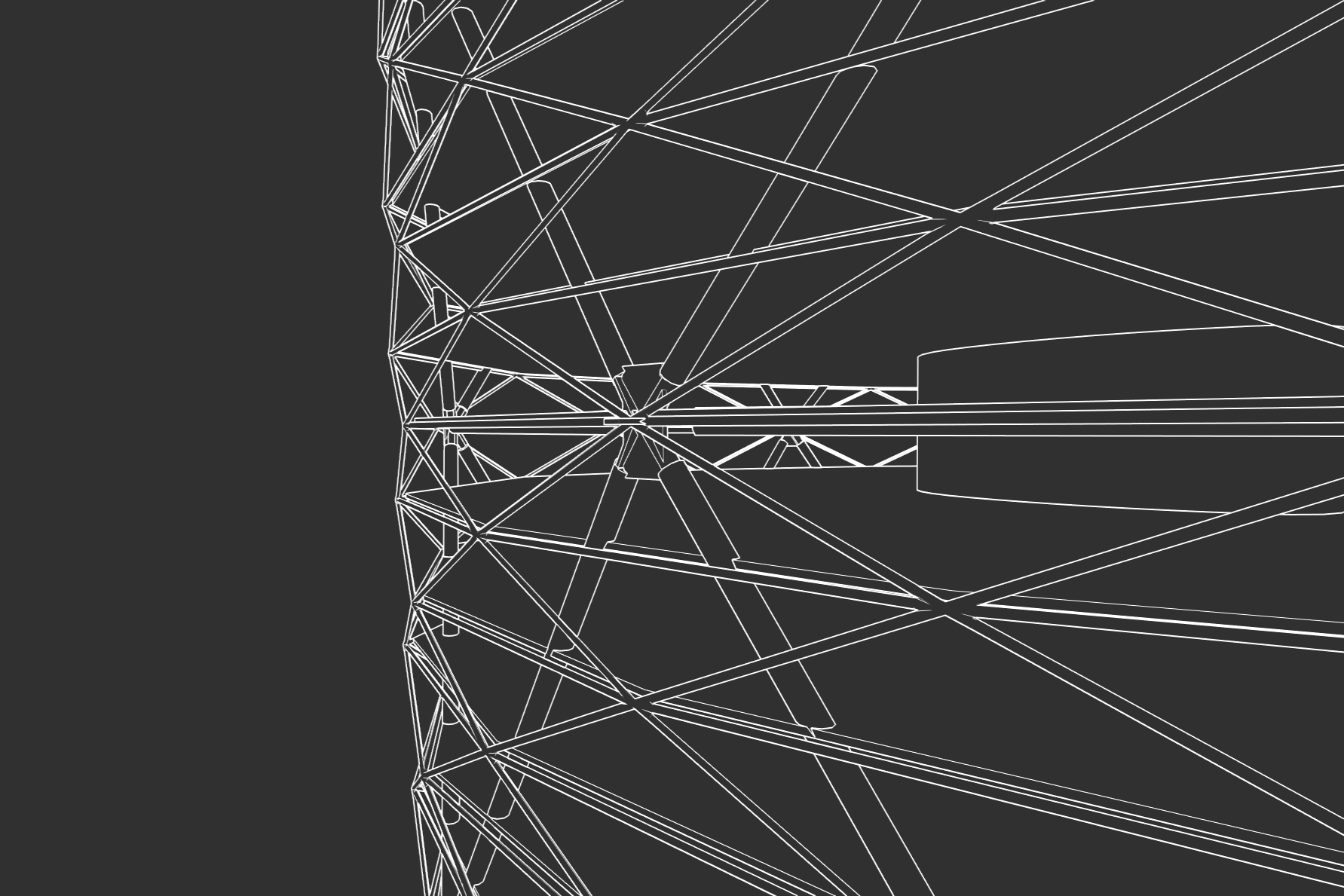
PfandPfandPFAND🤔
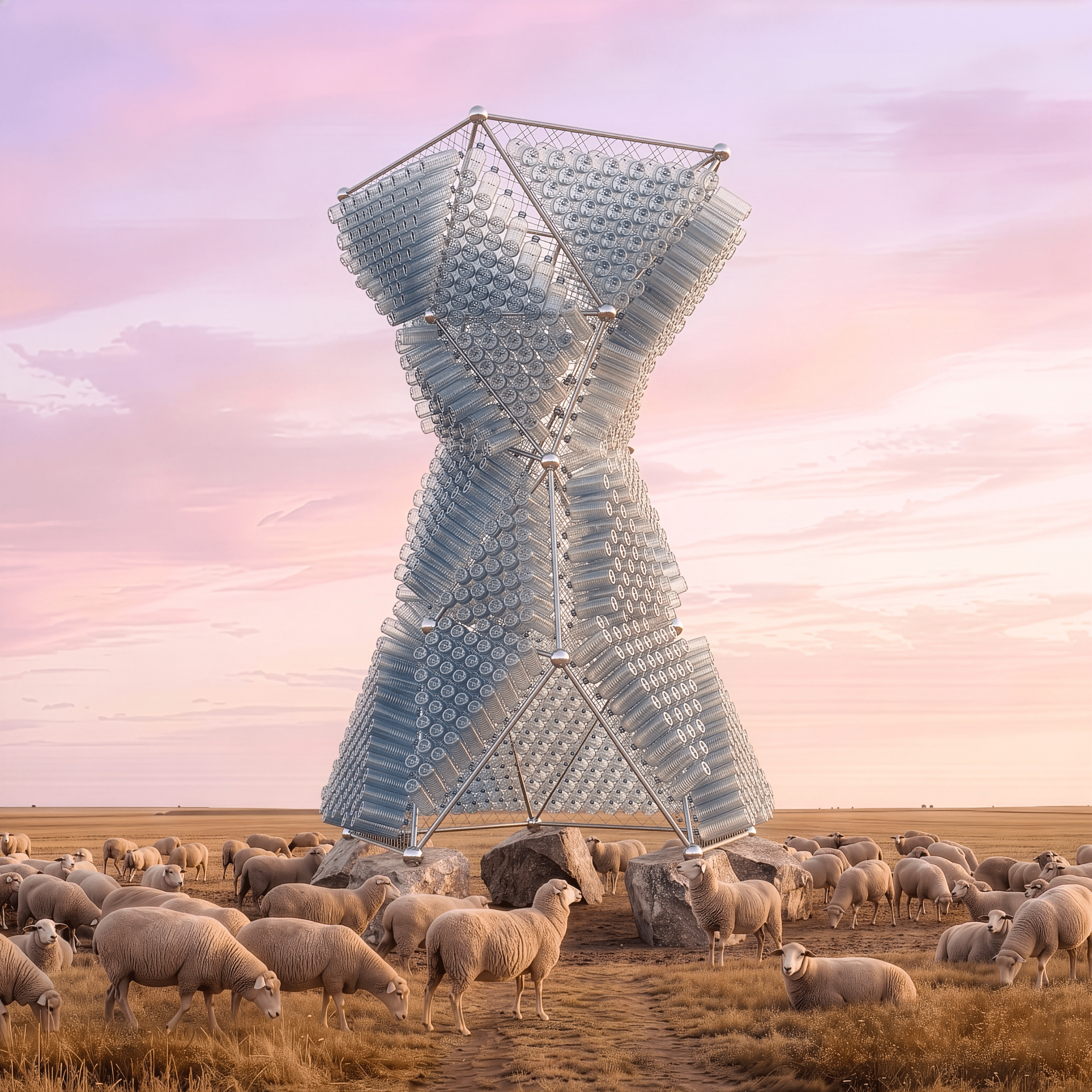
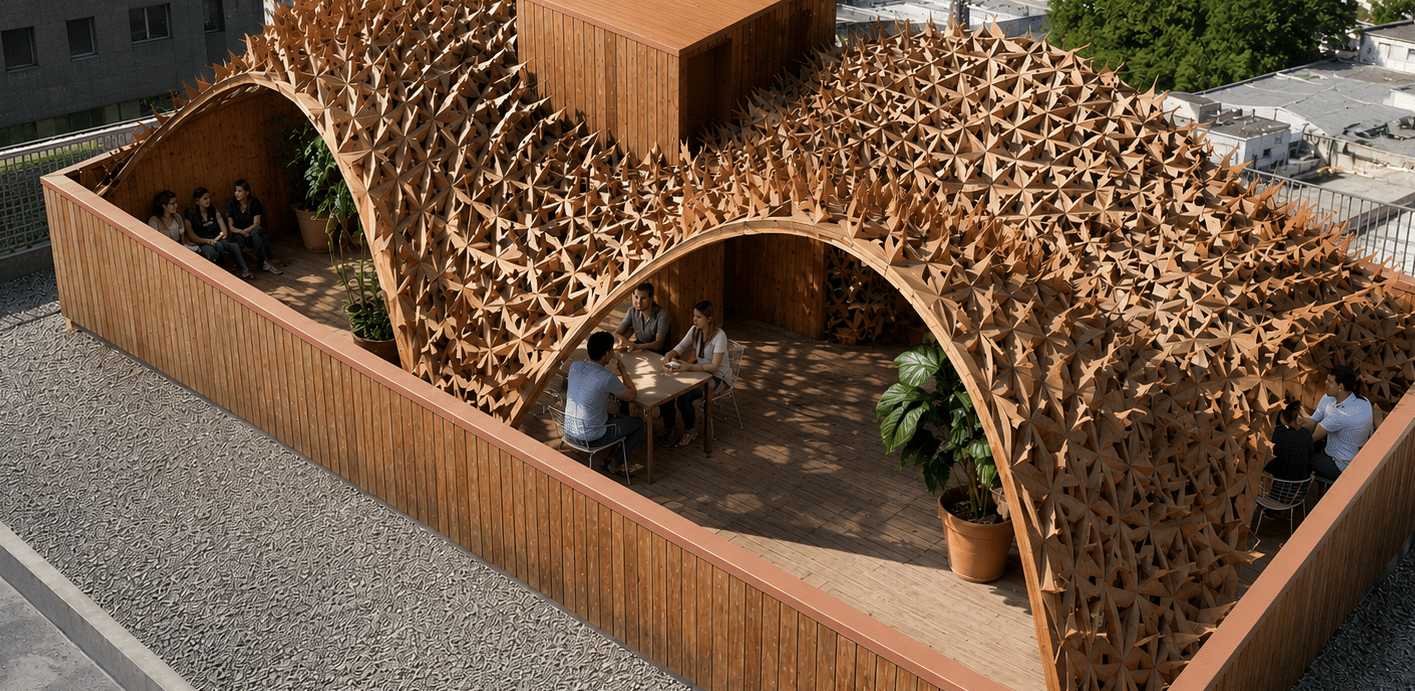
Workshop 3.1: Material Intelligence Workshop UAL@IAAC TEAM: IAAC Leonard Elias Böker | Carpenter/DesignerIAAC Janny Zhang | ArchitectureIAAC Elias El Asmar | ArchitectureIAAC Sam Holcombe | ArchitectureUFG Moritz Aigner | Design TechnologistUFG Christina Kraxberger | Architecture Material Intelligence is a cross-collaborative workshop between IAAC*, TALM** and Linz*** as part of a EU funded scheme, SCALExD: SCALExD … Read more