Thermo – Acoustic Urban Pavilion
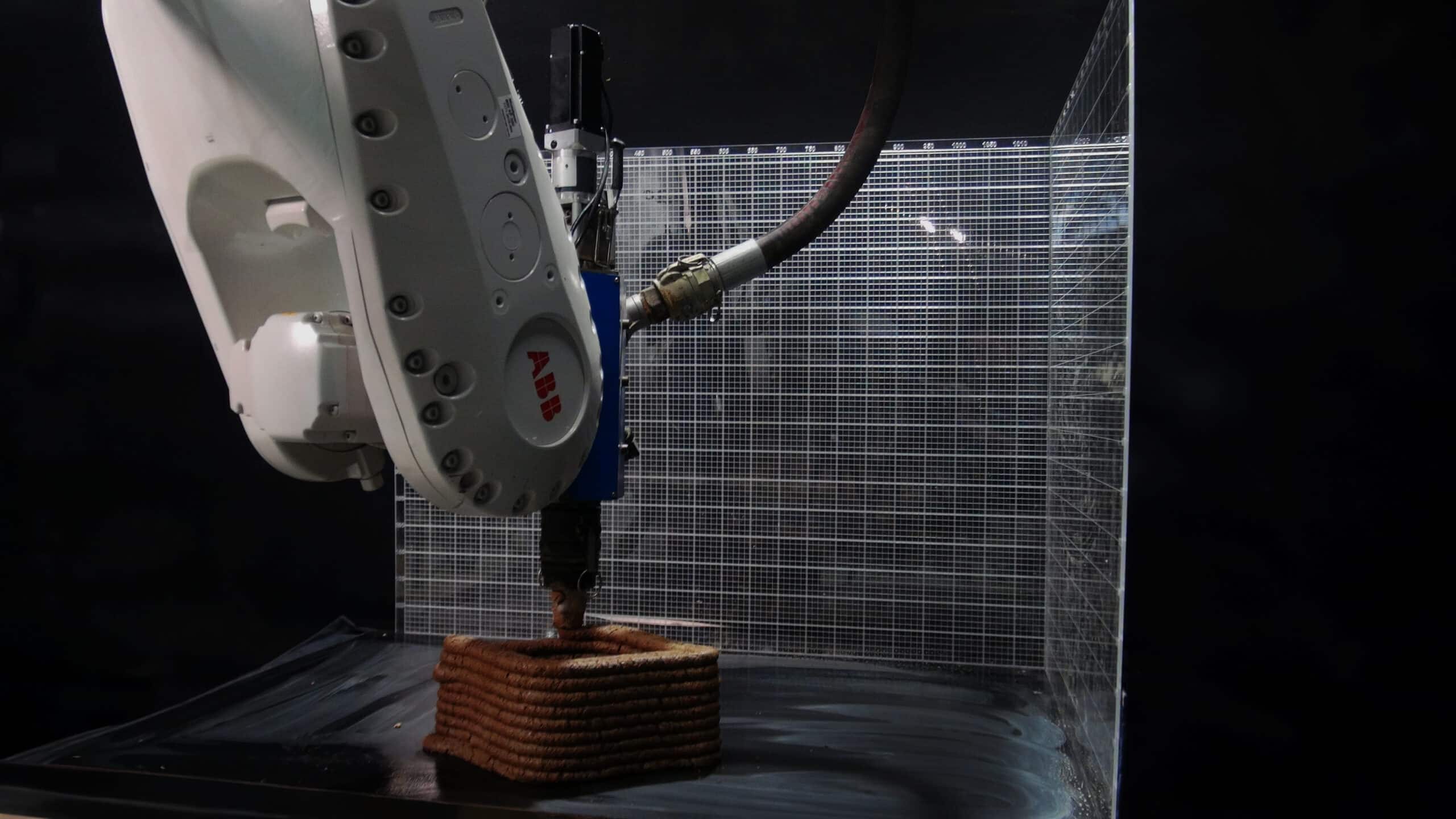
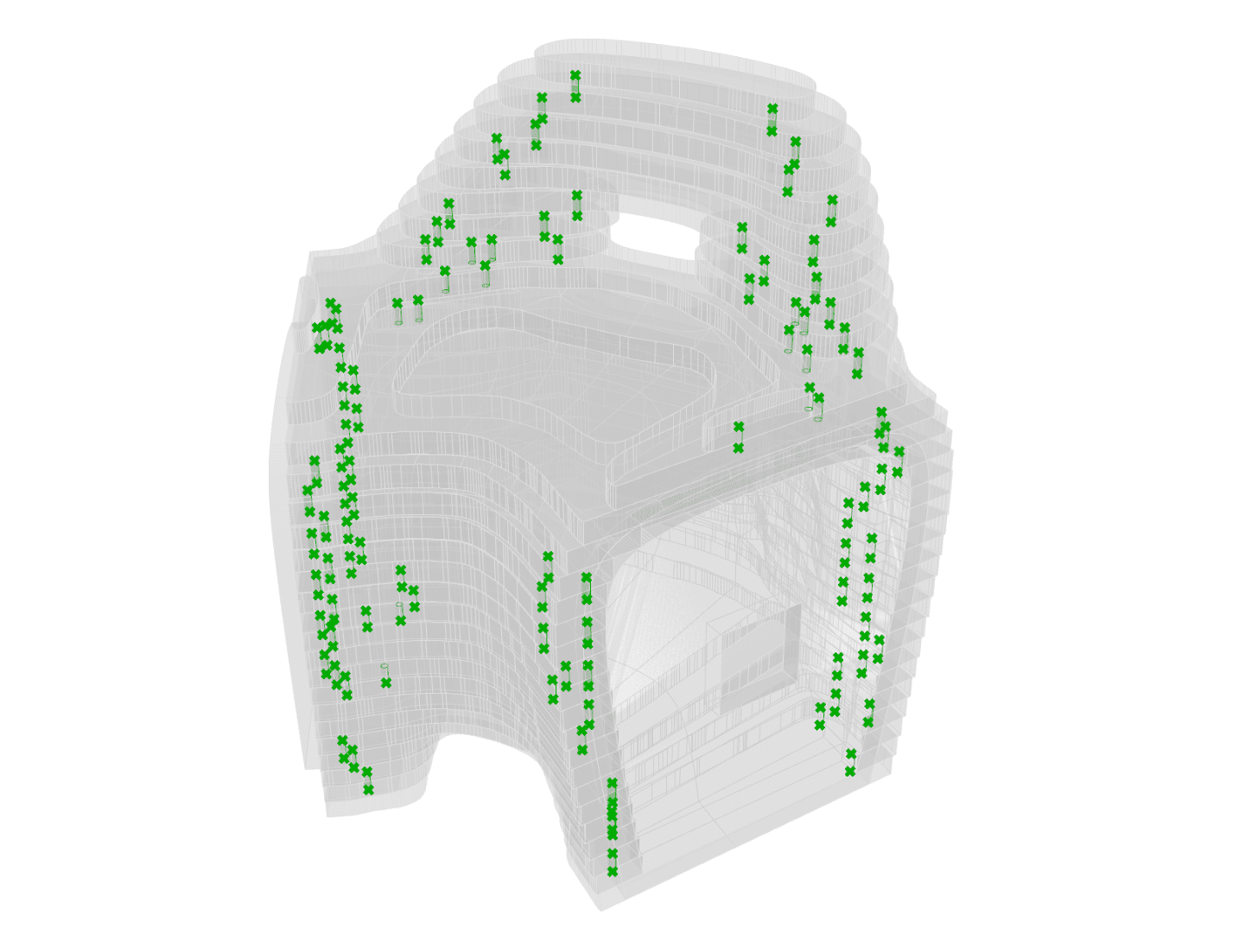
01 | Concept 02 | Resonance 03 | Prototype 04 | Components 05 | Circuit diagram If the temperature inside the pavilion is high or the noise level outside is high, both panels will close automatically using the servo motors. Below is how this logic connects to your architecture layers and the circuit design: 06 … Read more