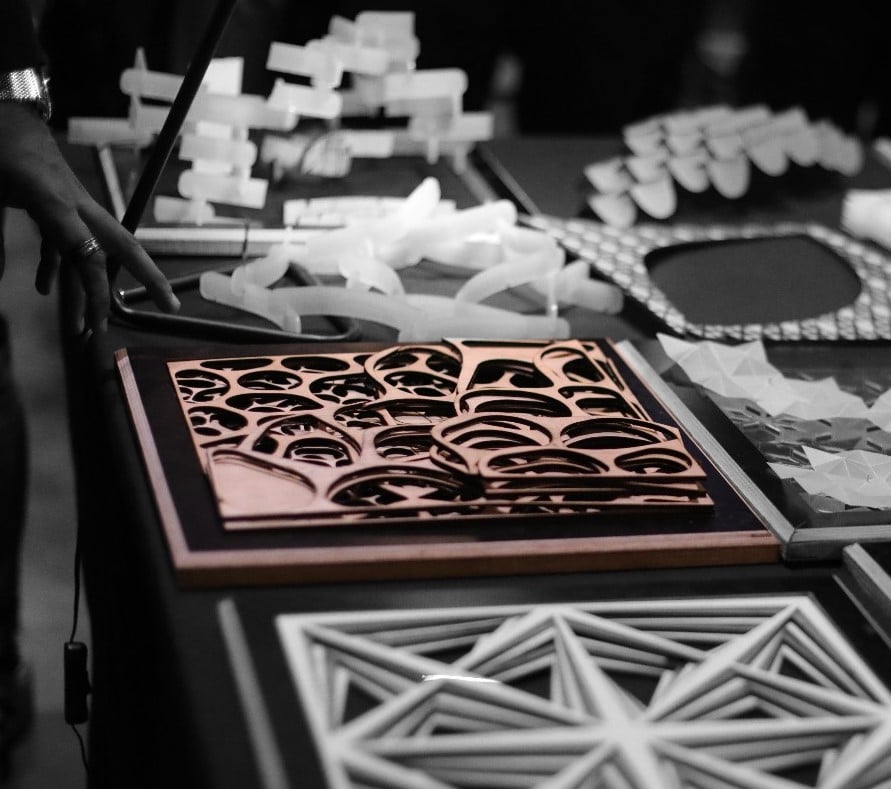
Design for Manufacturing of 3D Printed Architectural Systems
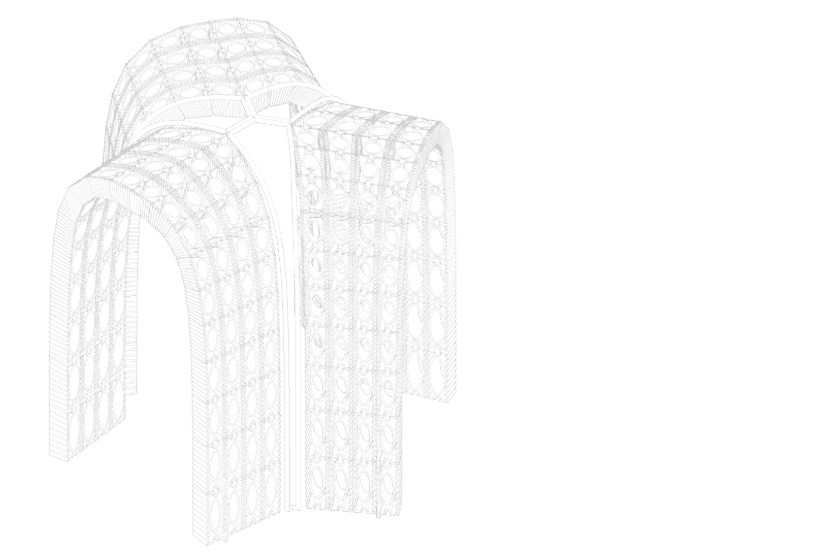
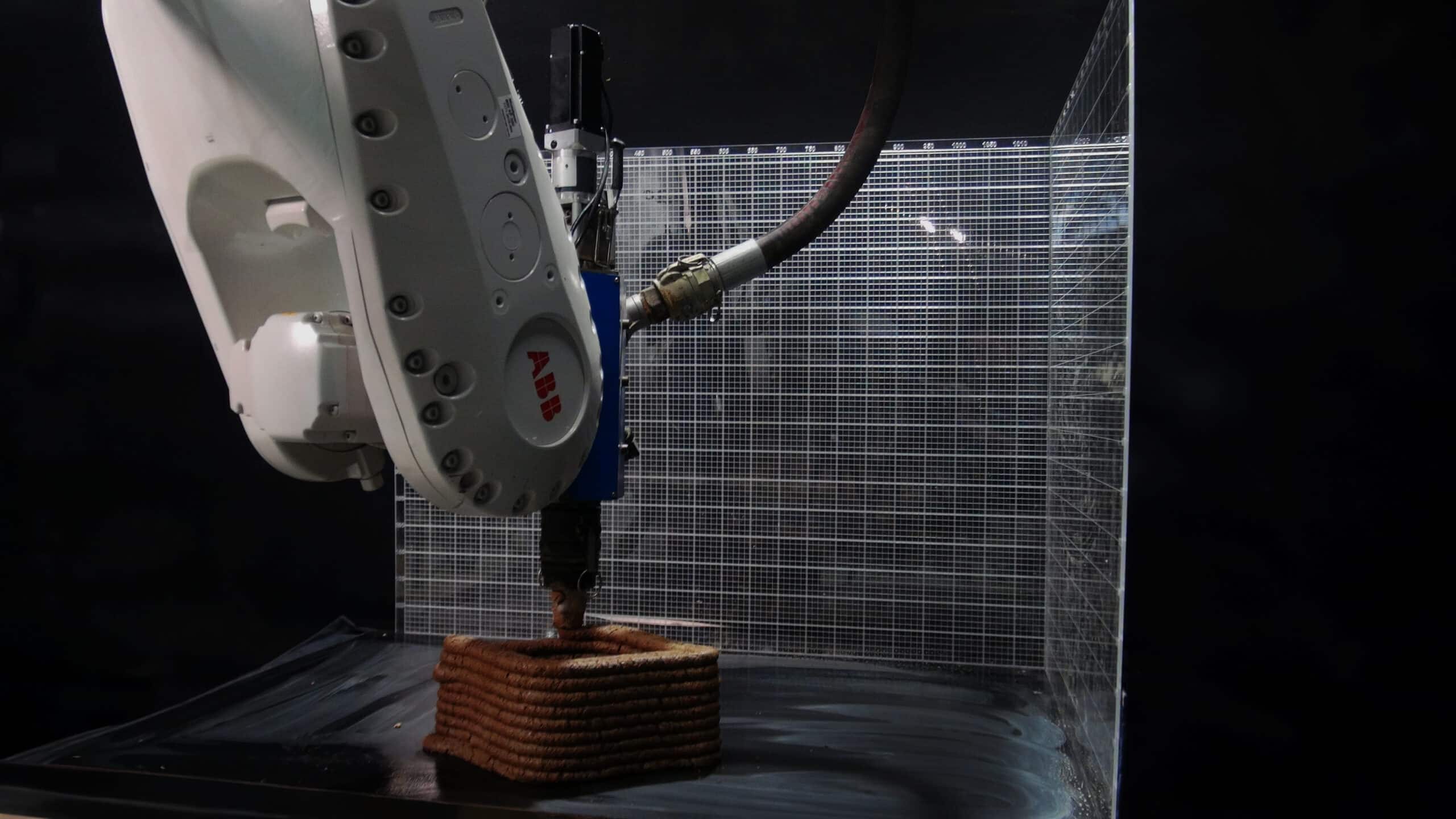
The project involves a large geometric form designed for clay 3D printing, consisting of 6 identical sections. This article will present the results of our analyses that explore the technical challenges and opportunities of this geometric design during the clay fabrication process. The workflow begins by rationalizing the pavilion structure into 6 symmetrical parts, isolating … Read more