Mortadella’s Tangled Dreams : A Robotic System for Material Conscious Weaving

https://youtu.be/9mTKVgDhBbM https://youtu.be/Ojcx7vGV24s https://youtu.be/nUvq2GNaiFw

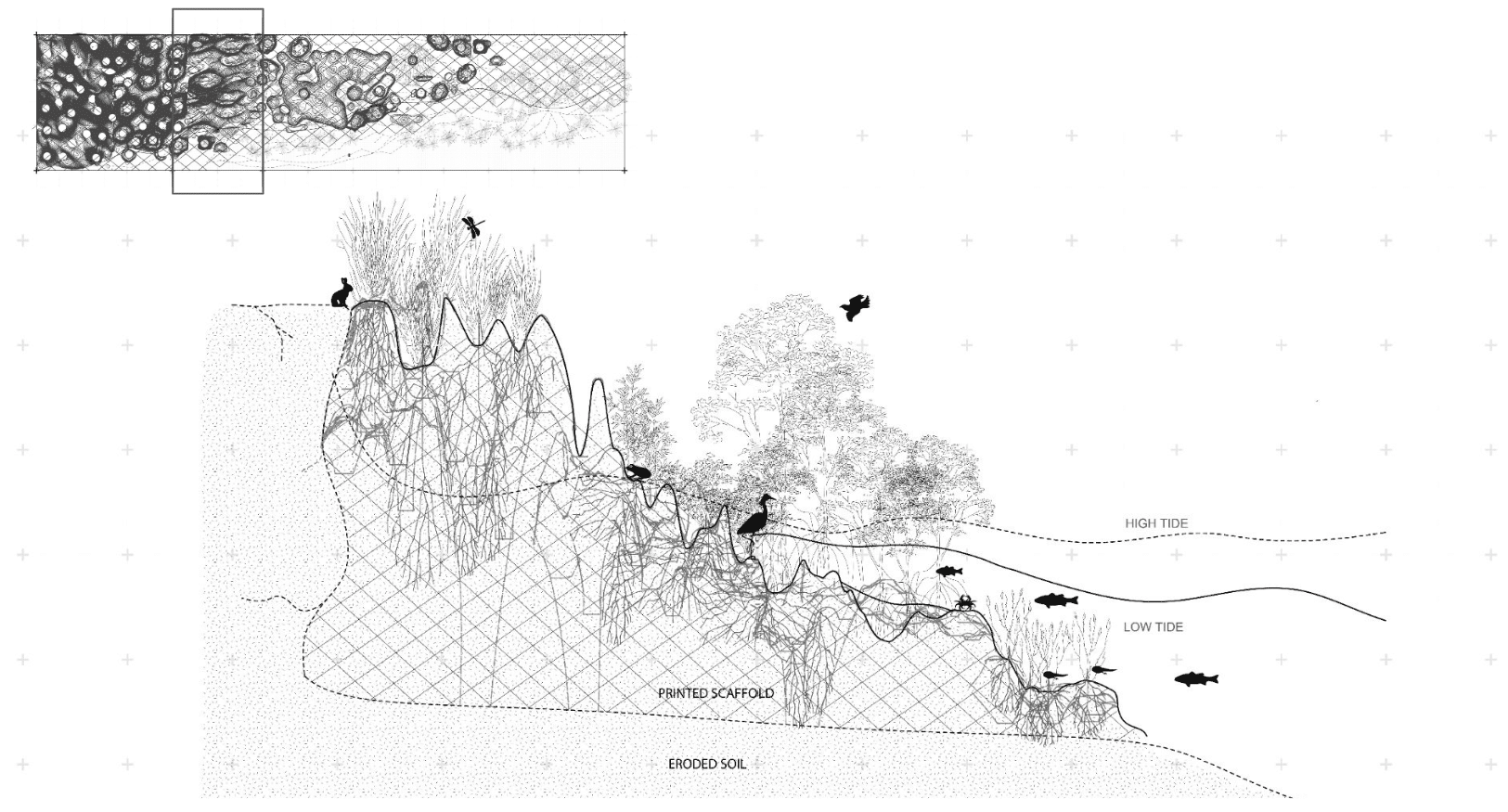
An exploration of root structures and material study 70% of the world’s population lives along coastlines and rivers, out of which, thousands of people get affected yearly due to erosion. However, our marine ecosystems such as mangroves and soils have the capability of storing large amounts of CO2 and provide a barrier amongst erosion. CAUSES … Read more

The plastic crisis has reached staggering proportions. If all the plastic waste on Earth were laid out, it would be enough to cover the entire surface of Argentina ankle-deep. Every year, we produce 300 million tons of plastic globally. Yet only 10% remains in use, while more than 80% is discarded. Of this discarded plastic, … Read more

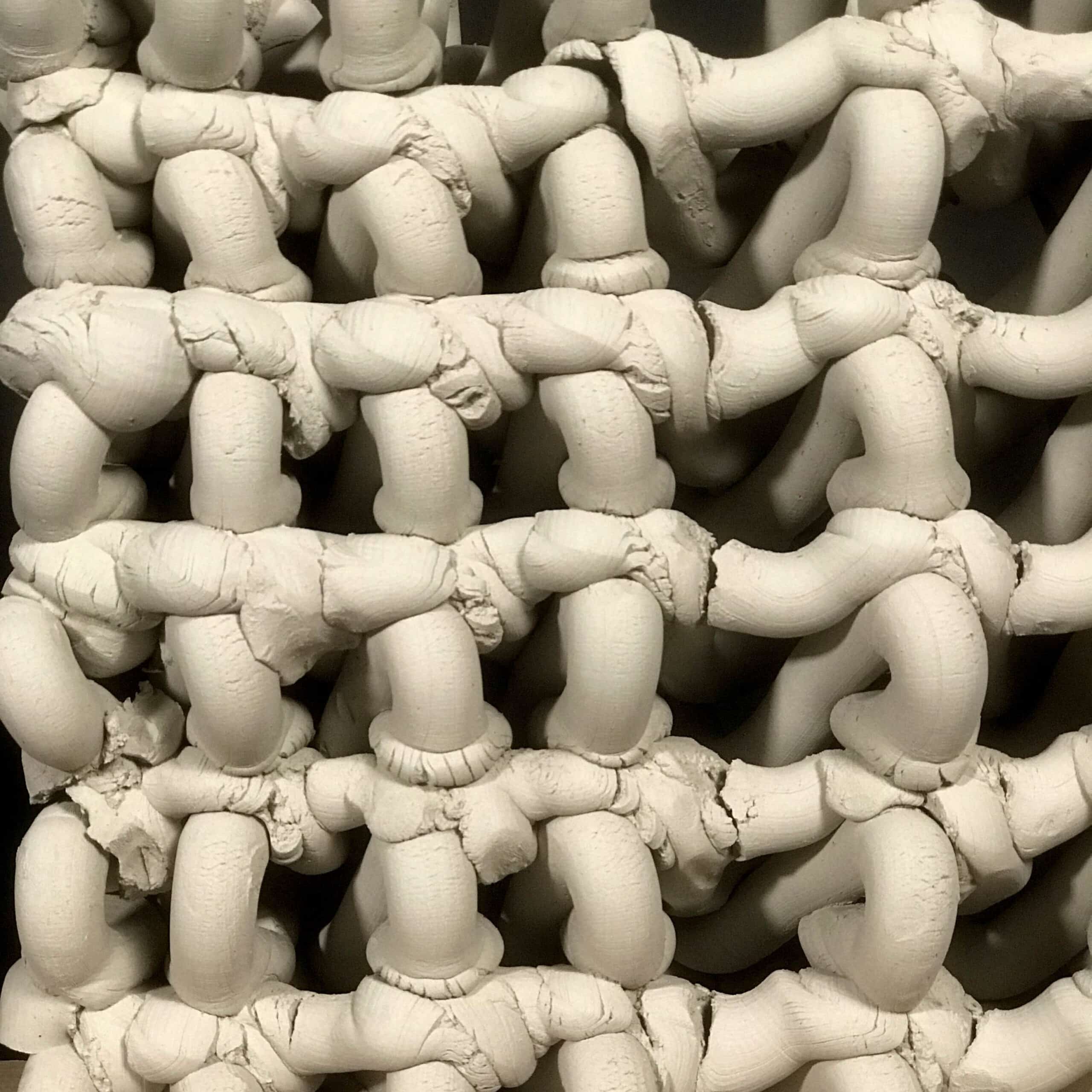
Bio-Receptive Interfaces is a performative multi-material clay-based system for indoor environments, integrating hydrogel vascularity to host an ecosystem of cryptogams and vascular plants. Fusing biological intelligence with embedded sensors and AI, it sustains a prolonged hydration cycle, purifies air, sequesters carbon, and reintroduces ecological presence into synthetic indoor worlds—transforming sealed spaces into living, responsive, multi-species … Read more

Crafting performative structures through robotic earth injection in dynamic fiber scaffolds Terraweave is an architectural research project that explores how robotic additive manufacturing can enhance the performance of natural building materials. Conducted as part of the Master in Robotics and Advanced Construction at IAAC, the project investigates the integration of willow scaffolds and earth injection … Read more
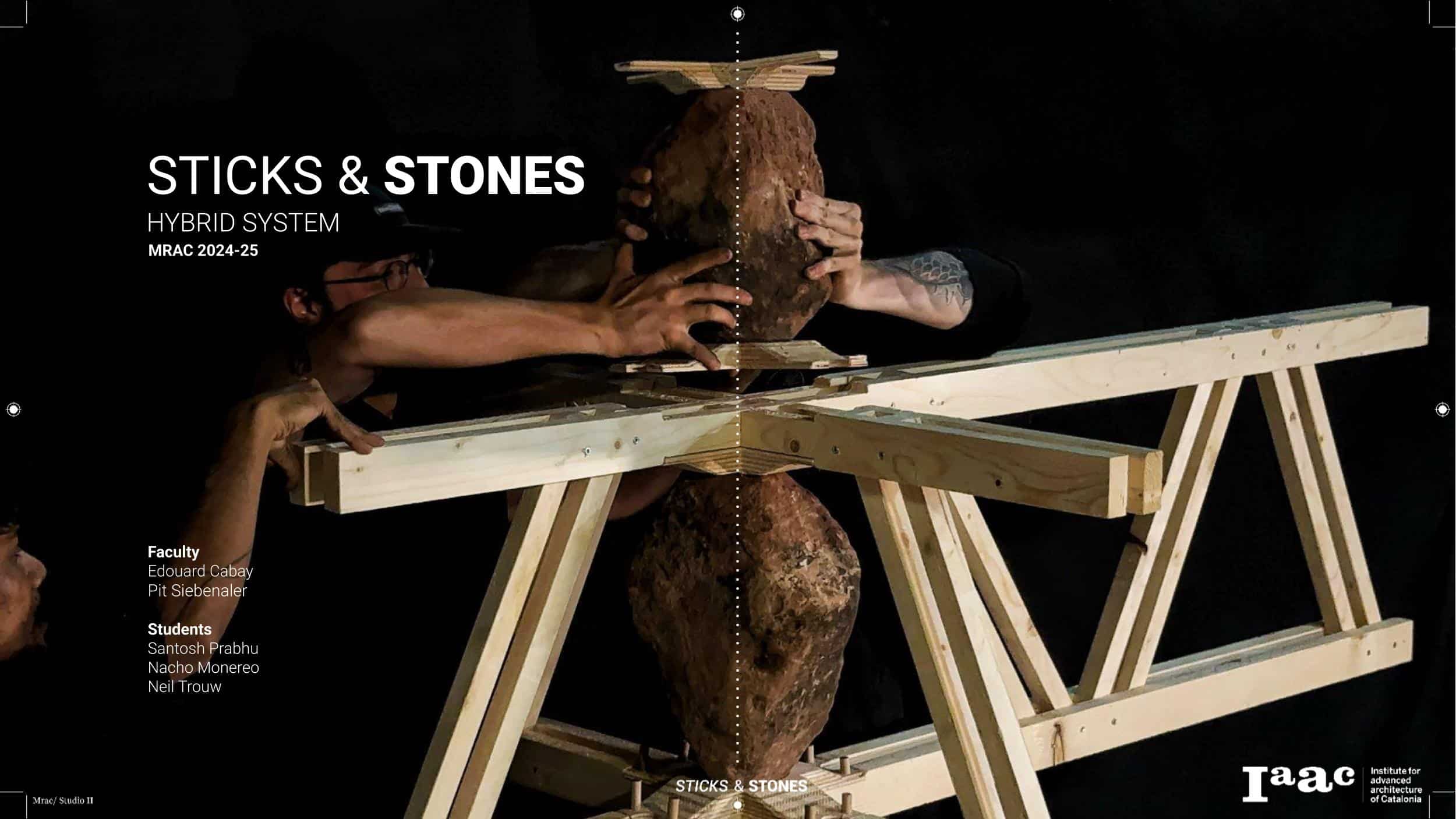
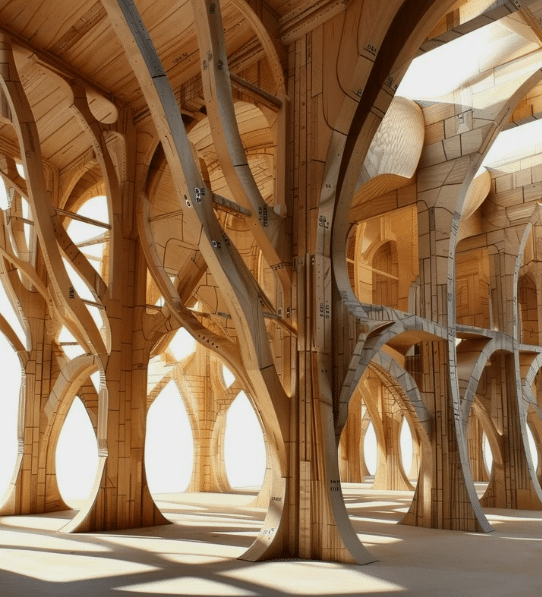
Hybrid Timber and Stone Constrcuction System Utilisng 6-axis Robotic Fabriction Our research begins with a critique of how we build today. Technological advancements have enabled rapid, standardized, and seemingly affordable construction. But these efficiencies hide deeper costs. In reality, we’re paying through the loss of cultural specificity, environmental integrity, and material identity. What emerges is … Read more
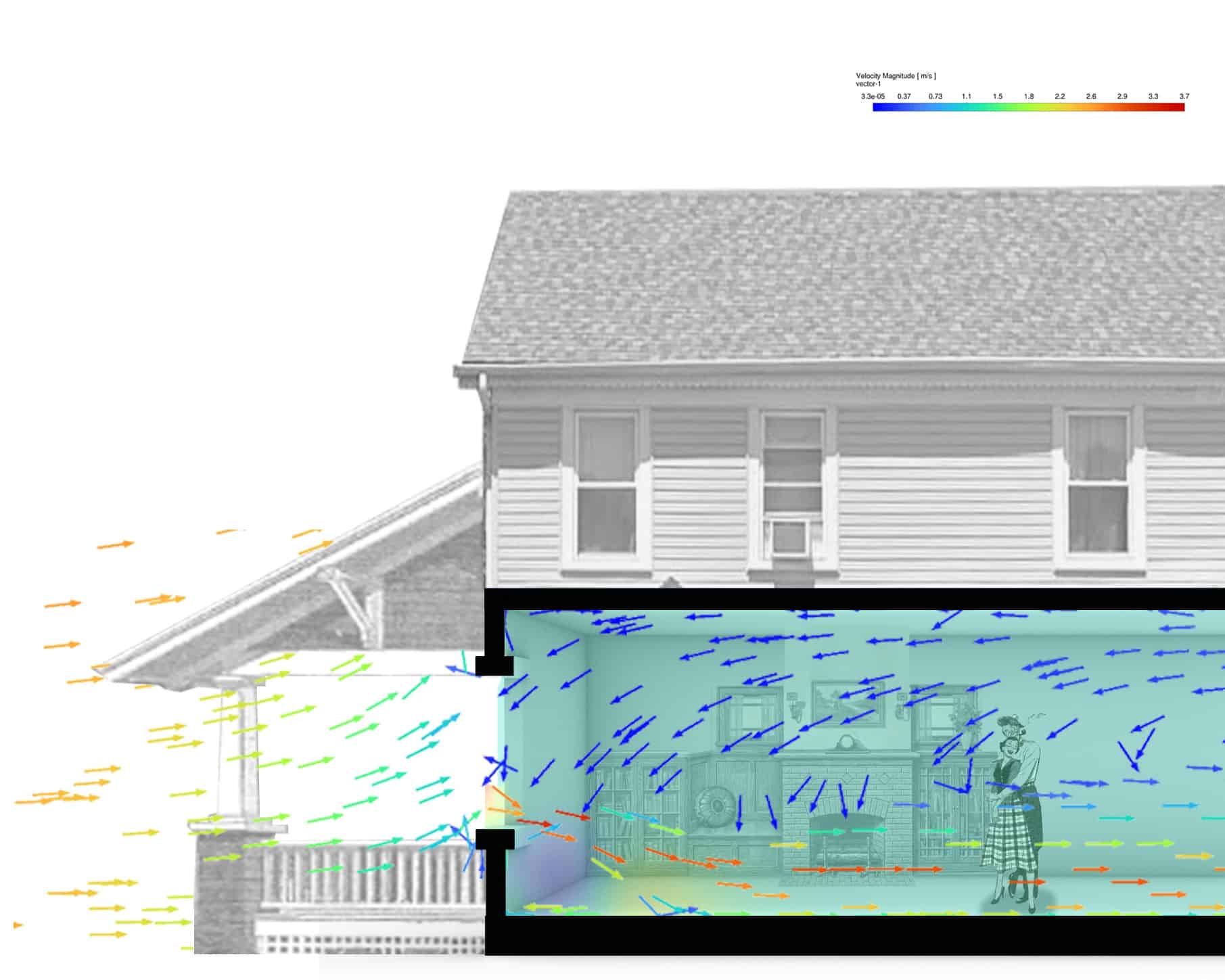
Computational Fluid Dynamics for Natural Ventilated Systems primarily located within the United States The Problem within Context: Sears Catalogue from 1930s to 1950s United States. The American Dream is a phrase that has taken meaning in the ownership of a home with a white picket fence. The phrase was popularized in the 1930s after WWI … Read more
ABSTRACT Autonomous parametric furniture assembly using modular blocks and ROS-driven industrial robots promises to revolutionize on-demand manufacturing. In this work, we introduce DRDA (Dynamic Robotic Design Activities), a unified framework that seamlessly links customer-driven design to autonomous multi-robot execution. A user-defined geometry and style, which our custom block-selection and toolpath-generation engine converts into collision-free pick-and-place … Read more

whilst global temperatures are rising towards +4°c, building facades are a main contributors to the urban heat island effect within cities.2050 about 70 % of the world’s population will live in cities.The building sector globally consumes a significant amount of energy for heating and cooling. In fact, about half of the global cooling load is … Read more
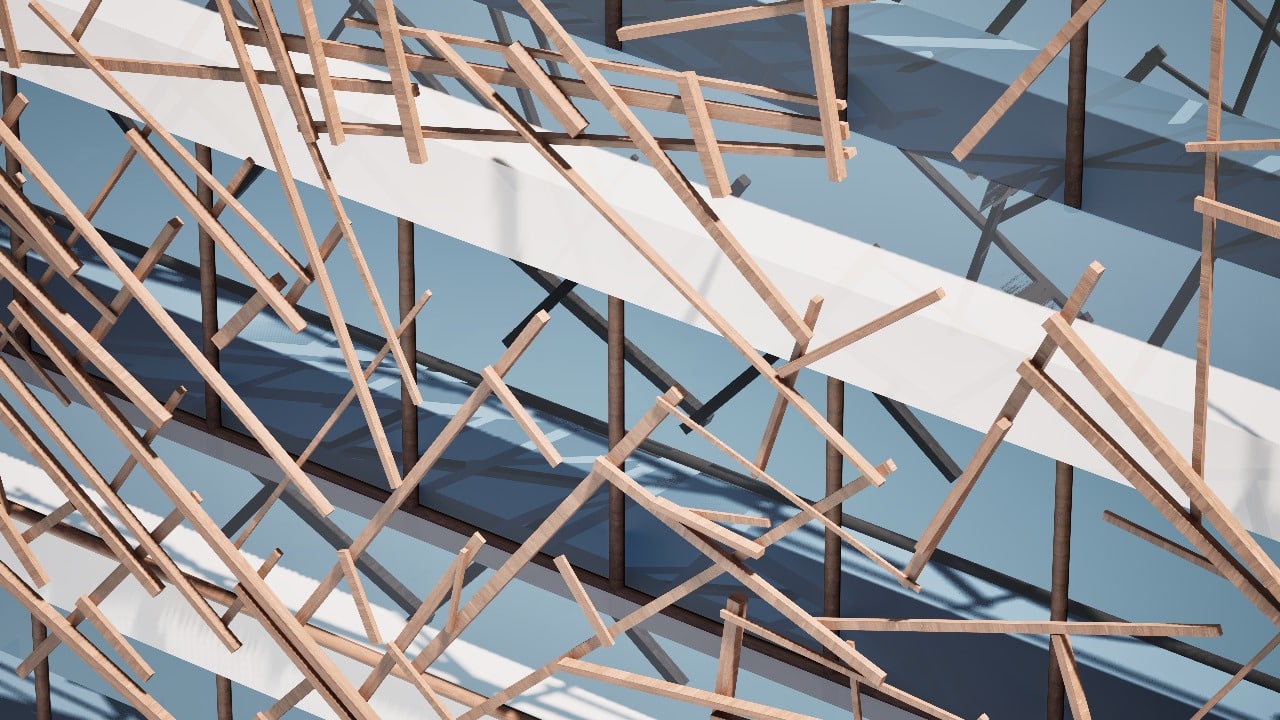
In the pursuit of a sustainable built environment, Timber Syntax demonstrates how reclaimed, non-homogeneous timber can be transformed into high-quality facade systems through a computational and robotic pipeline. Developed at the Institute for Advanced Architecture of Catalonia (IAAC), this project bridges waste reuse, advanced fabrication, and circular design to propose a new paradigm for timber … Read more

“What if you could speak your design ideas and watch them transform into complete parametric scripts in real-time?”

Carbon Envelopes Toward Carbon-Sequestering Architectural Systems through Biochar-Concrete and Hybrid Fabrication The construction industry is one of the biggest contributors to climate change.We’re facing a paradox: The materials we use and how the construction industry works today are destroying our chance of having a future. Besides the emissions, there are other problems that we need to … Read more

Why – Problem context In the current forestry industry, only 40% of each harvested tree is actually used for construction or valuable products. The remaining 60% often ends up as waste — discarded, chipped, or burned as firewood. This imbalance sparked a fundamental question:Can we change this ratio? Driven by that inquiry, we began exploring … Read more

What if body becomes the carrier of code? Information derived from human-body; it’s movement, expressions, how it sounds as a dataset for AI interpretation and use. What are the different dimensions of these interactions & interpretations? Biological Dimension AI Dimension Informational Dimension Different Modalities Study of Amazon’s AI systems Visualisation of the Back-End Process Follow … Read more