
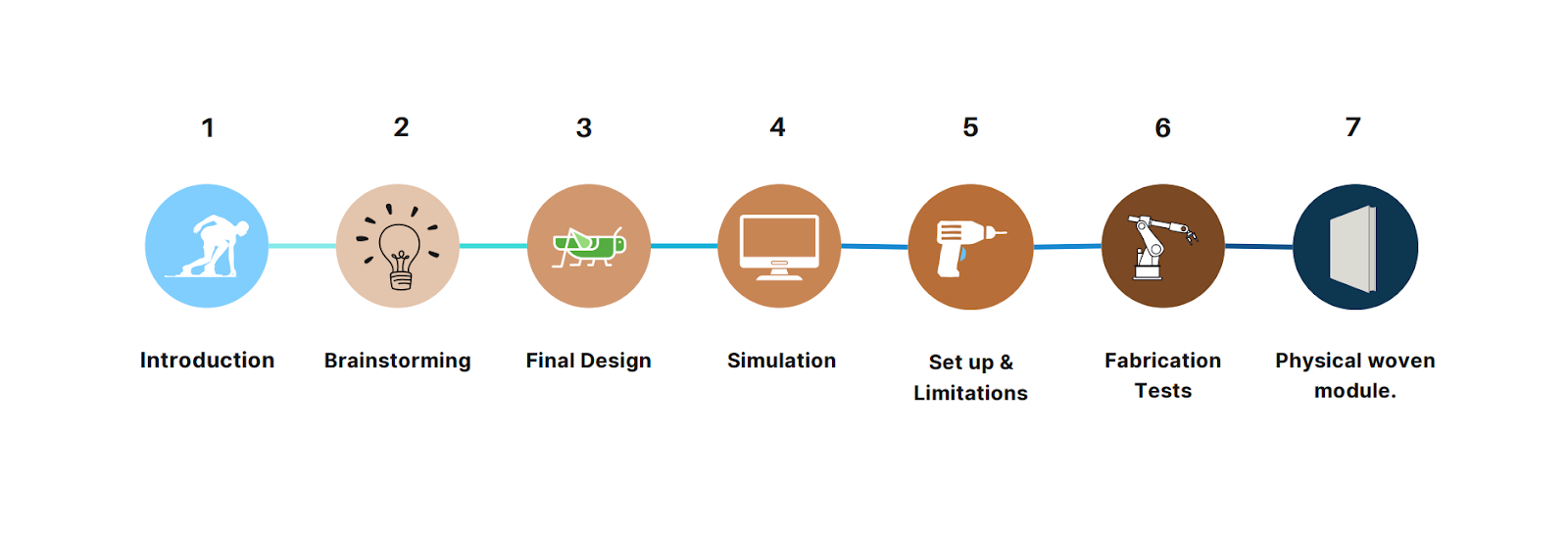
Introduction:
This seminar invited students to explore weaving of natural materials with the help of a 6-axes robotic arm in order to create a physical woven module.
Context:
Weaving techniques have been around for thousands of years with various hand made small applications but now with digital fabrication tools we are able to implement those techniques in the construction industry by weaving natural materials with the help of robotic arms in order to weave large structures. Building in this context, the seminar invited students to explore weaving techniques and to make a 1:1 scale prototypes by weaving willow. Hence, students worked in oder to explore new possibilities in the combination of digital fabrication tools in order to create architectural proposals for modular structure made out of weaving natural materials.
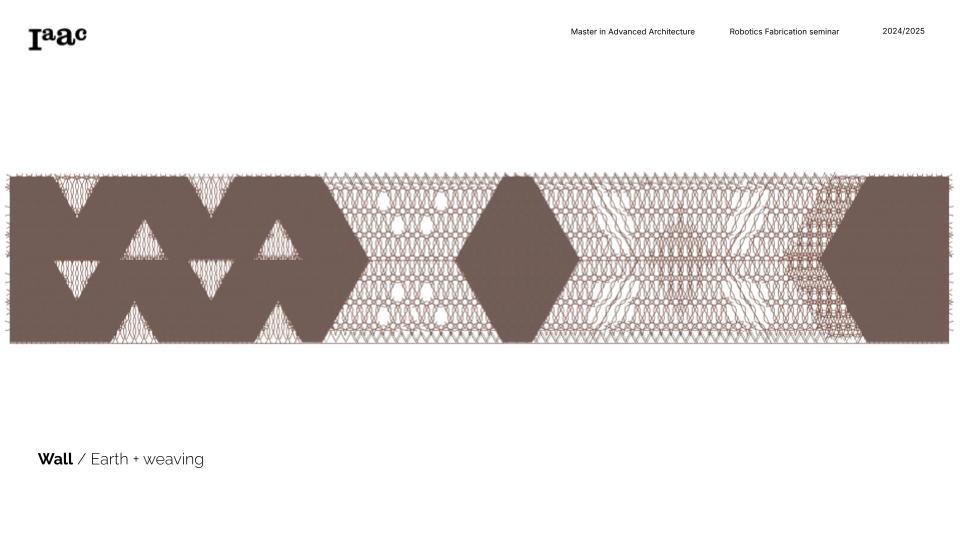
Therefore in this workshop we looked at the reinterpretation of traditional textile weaving processes through digital design and robotic fabrication technologies. The material that was used for the fabrication was willow and jute.
Aim:
Students explored different weaving principles & techniques by developing a methodology to deal with the behaviour of natural materials combined with digital fabrication methods. So by observing the characteristics of natural materials and by simulating their fabrication, students learned about the their limitations and construction capabilities. Furthermore the students translated those manual weaving principles & material irregularities into an automated digital fabrication process, with the assistance of a 6-axes robotic arm. The goal was to create a architectural proposal for a structure made out of weaved willow.
Brainstorming:

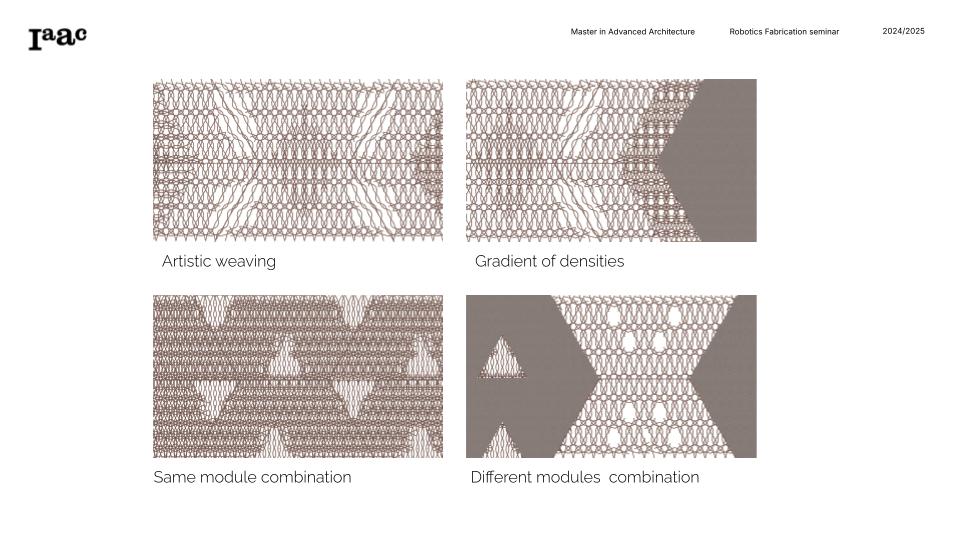
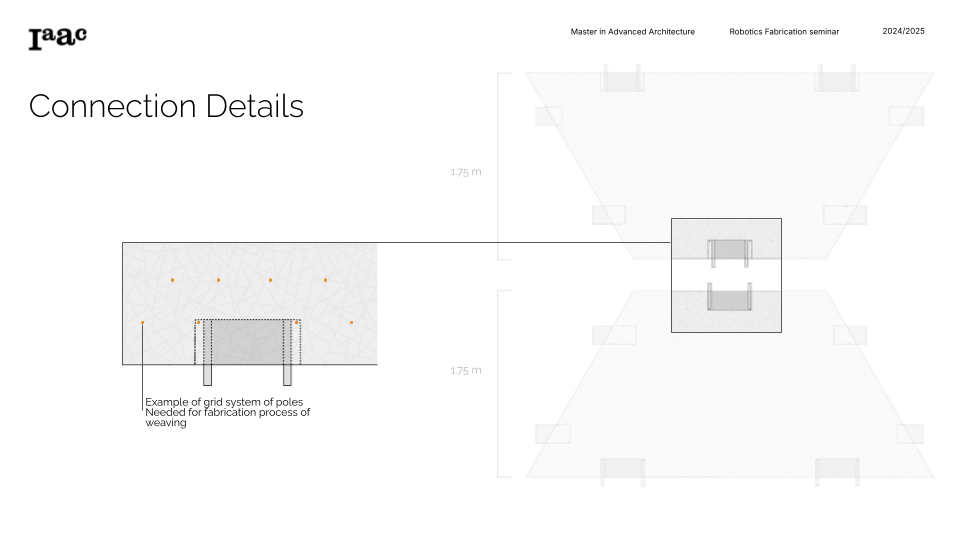
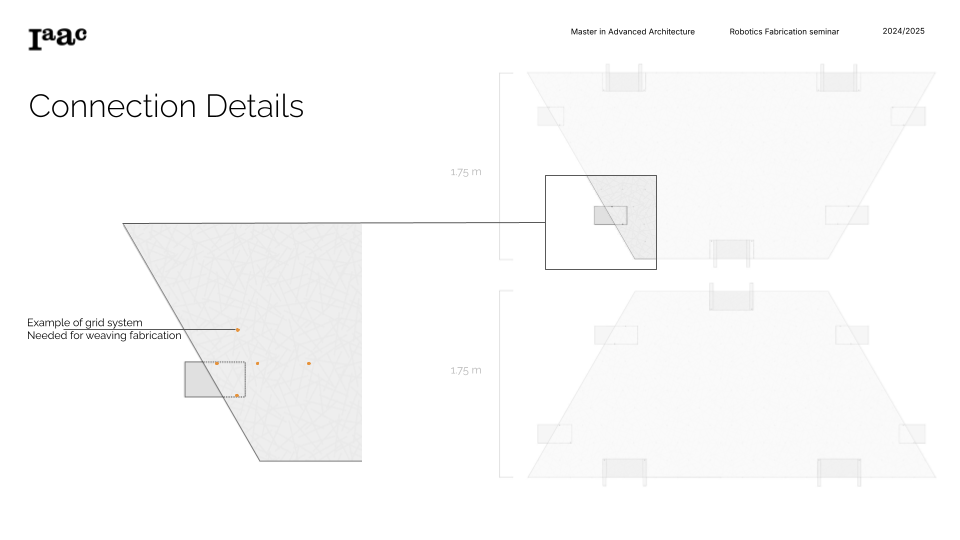
Initially the students were given some module geometries in order to start creating weaving patterns based on a given matrix of poles. Consequently based on one specific matrix the students could then start experimenting on different combinations of weaving.
Thus in this workshop the students had to take under consideration both the possible weaving combinations that could be implemented on a specific matrix of poles and calculate the limited bending properties of willow in order to design a practical solution on this matrix.
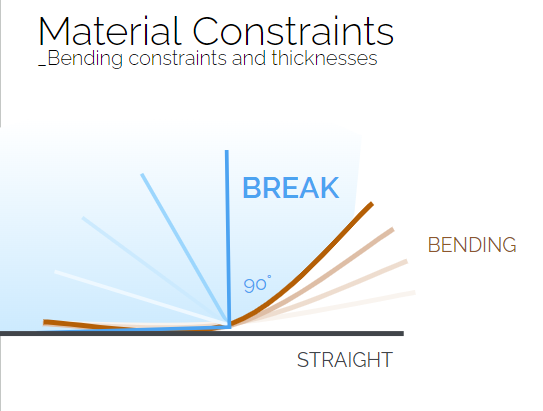
Constrains:

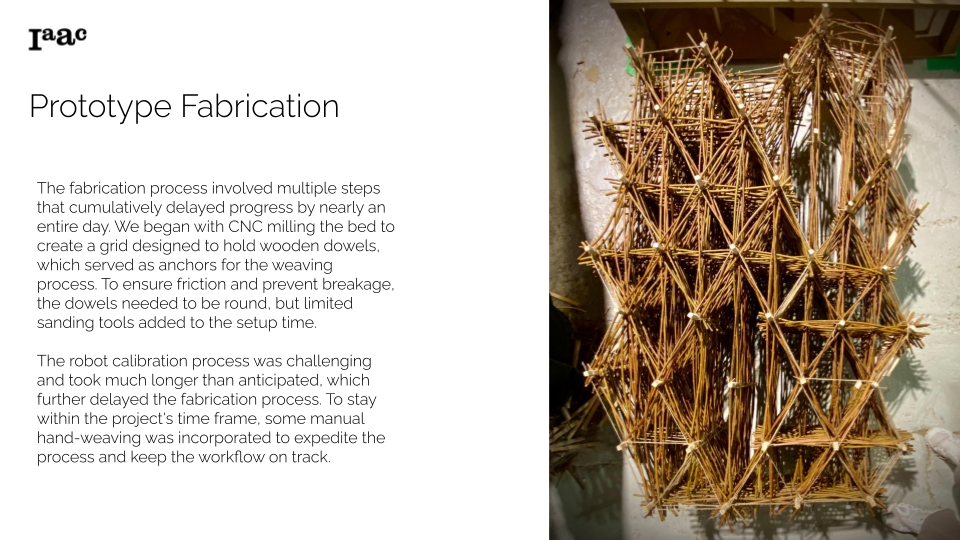
The bending of the willow was limited because it could easily brake therefore this factor would influence the design freedom and constrain the following fabrication process.
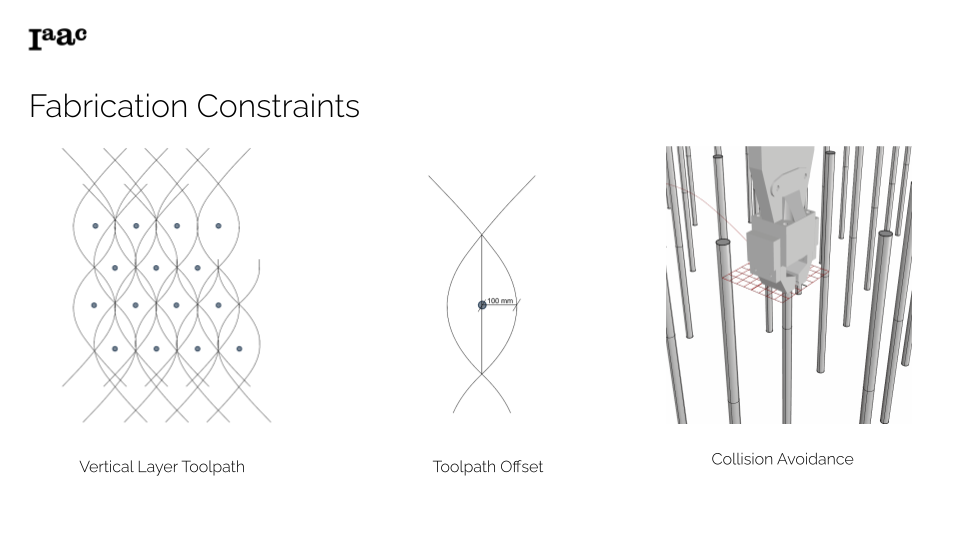
The main fabrication process would be a robotic pick and place of willow so for safety reasons it was important to evaluate the successful movement of the robotic end effector. As a result the students needed to take under consideration constrains like the toolpath offset and the avoidance of collision in order to prepare the robot’s movement during the weaving of the willow.
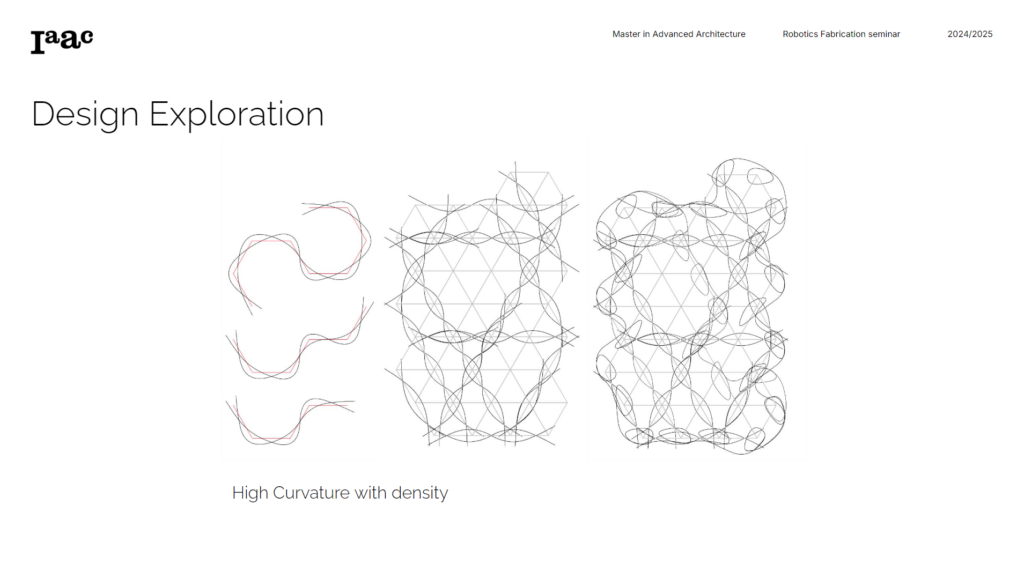
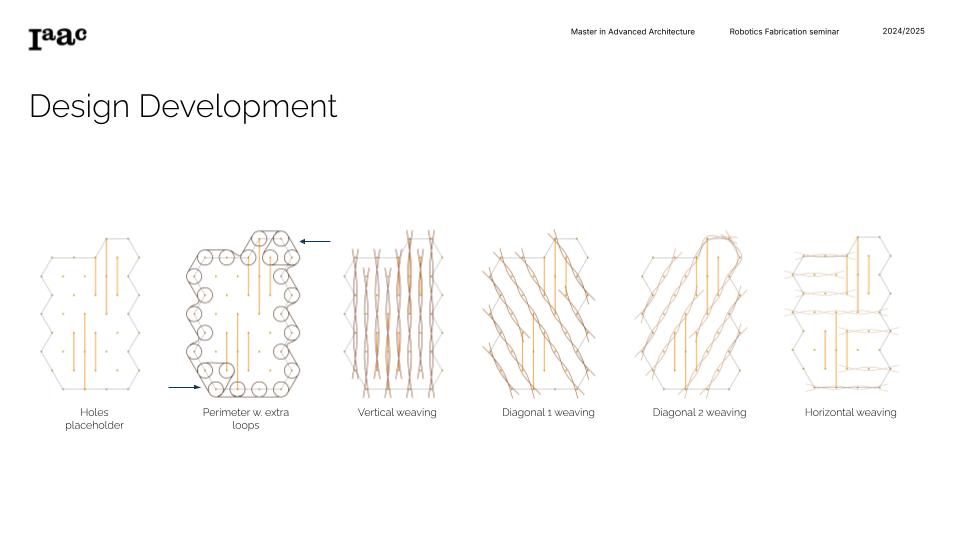
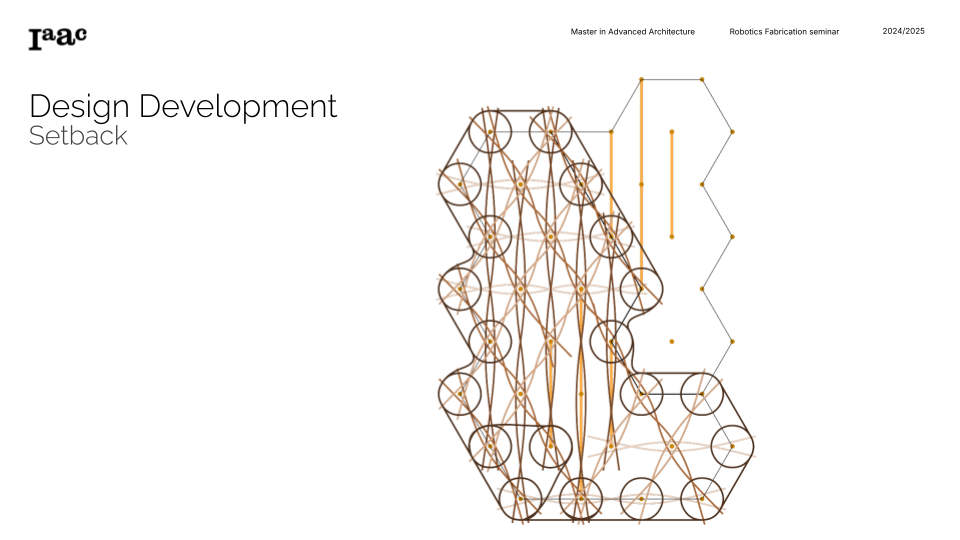
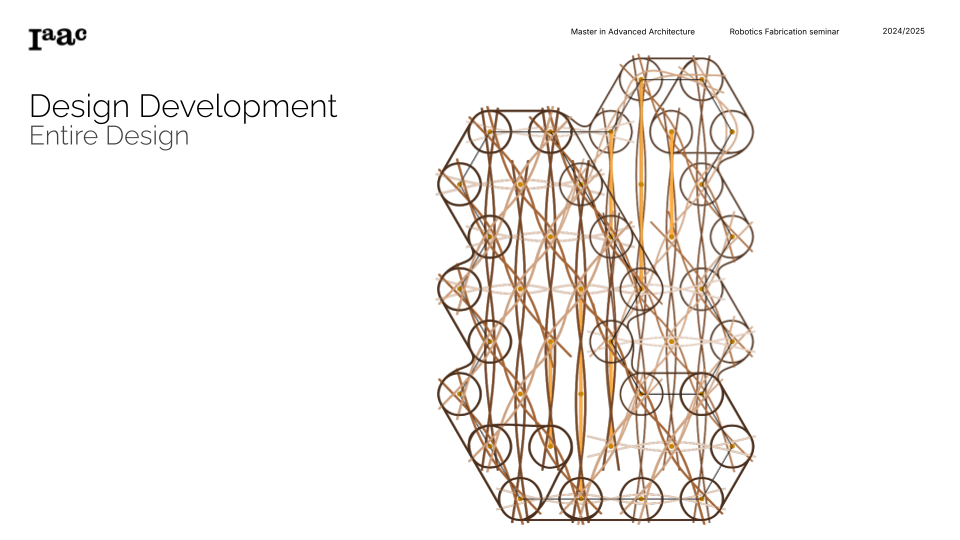
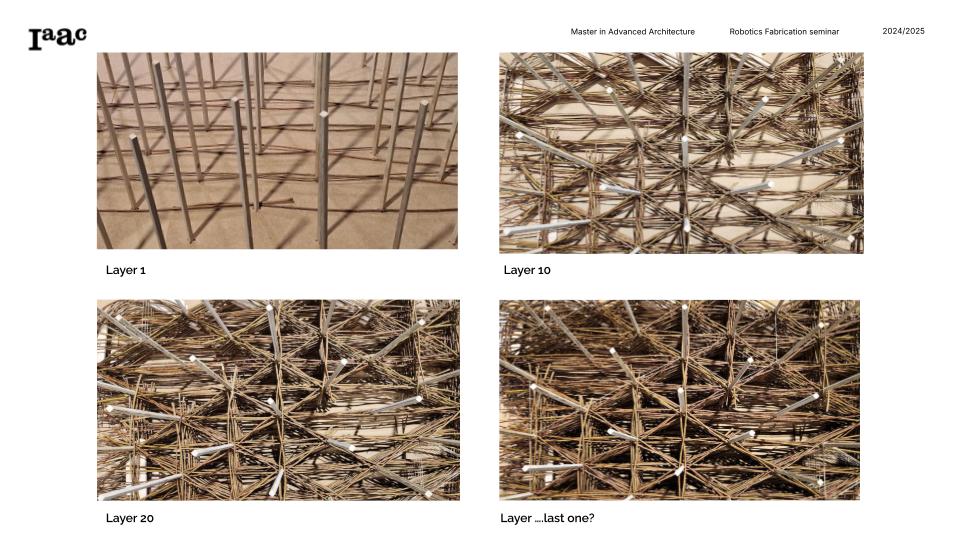
Design Development:
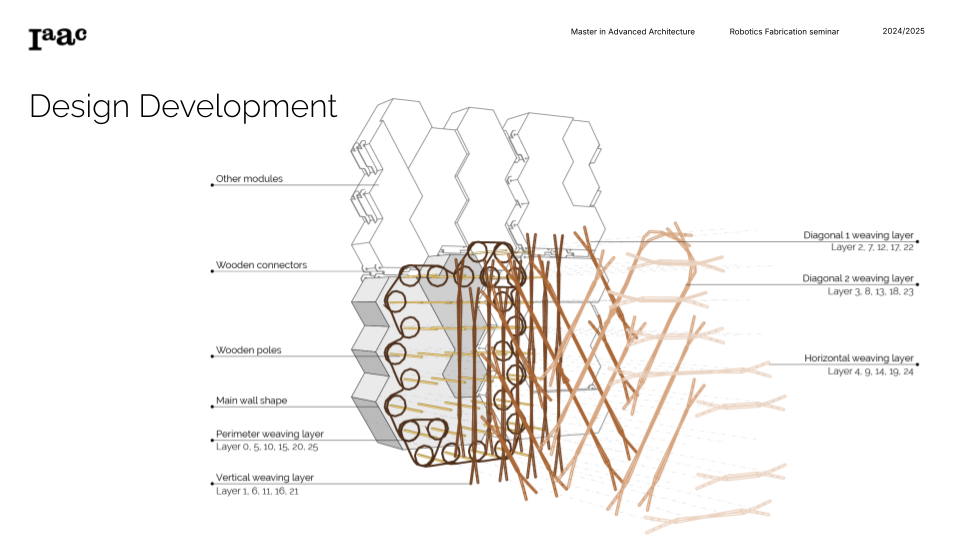
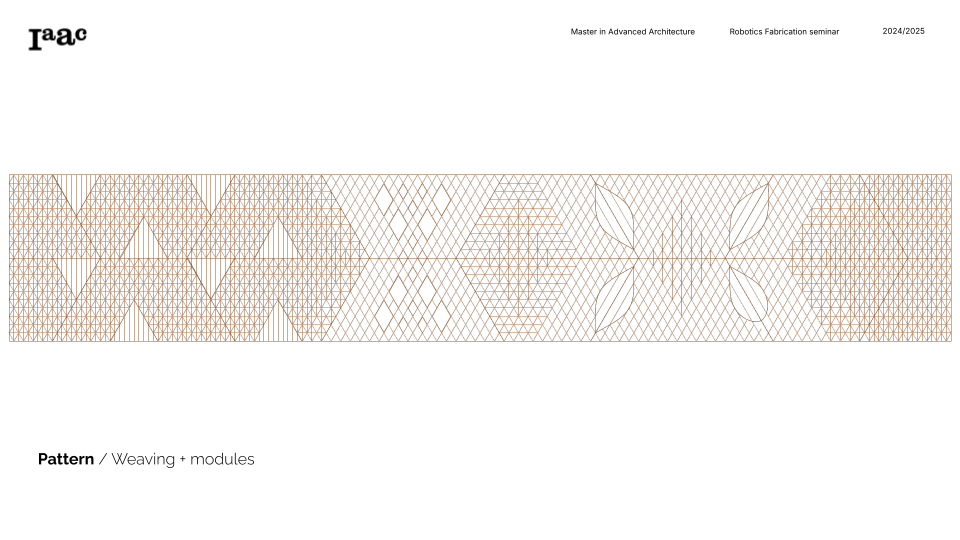
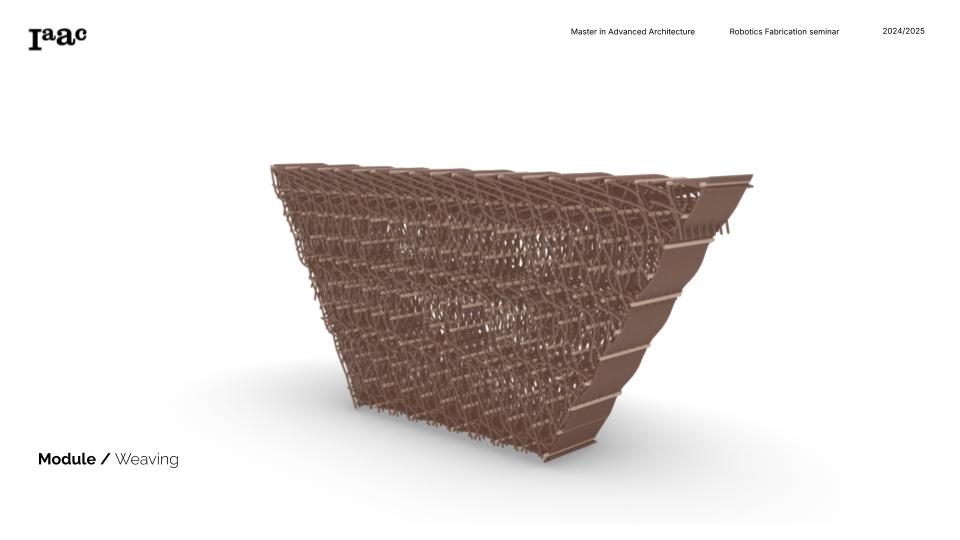
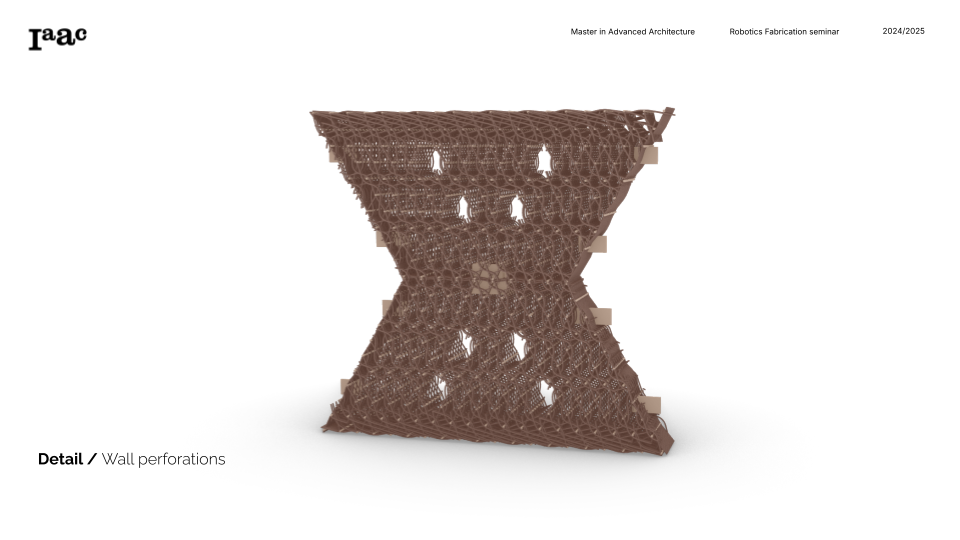
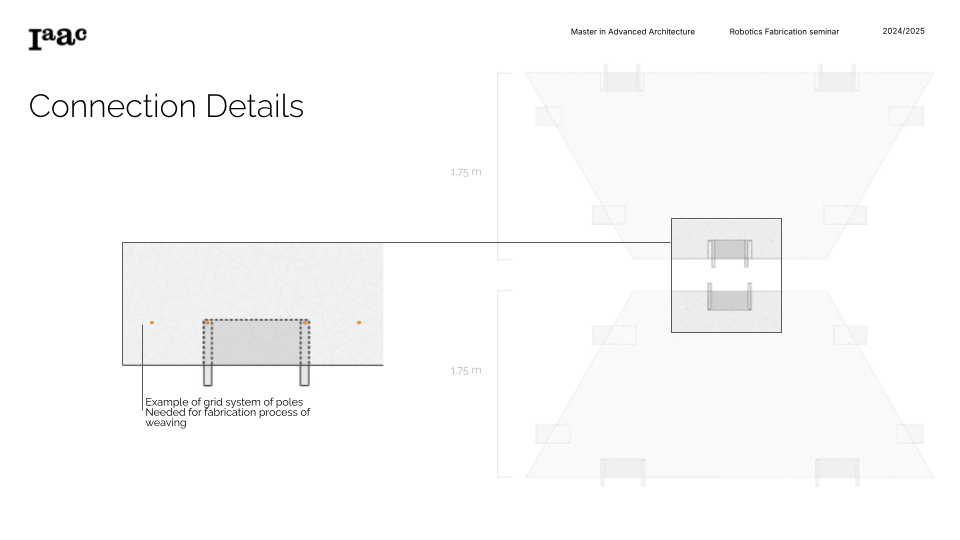
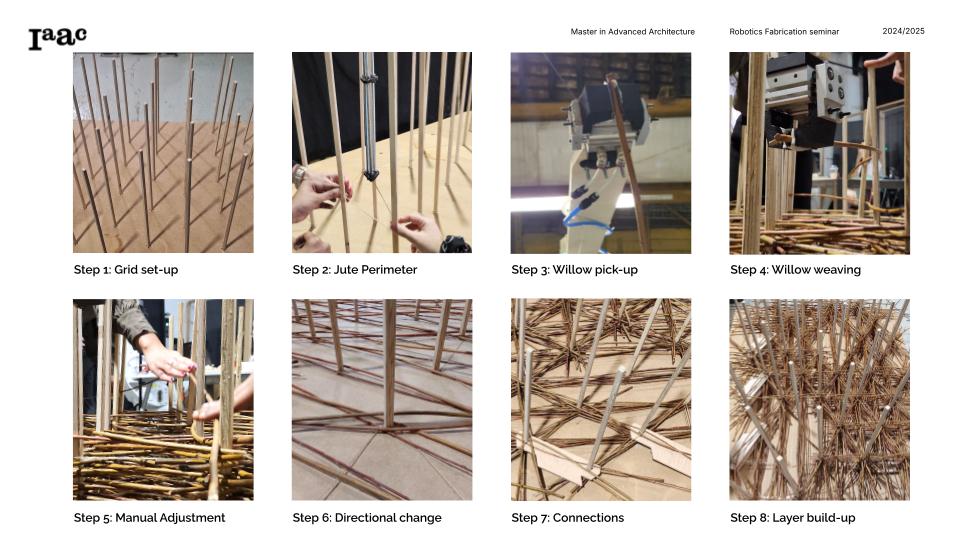
During the design development of the weaving many layers were prepared in order to support and give thickness to the structure. The main idea of the structure would include two holes in the matrix as reference points and then a perimeter, vertical , diagonal and horizontal weavings.
Architectural Proposal:
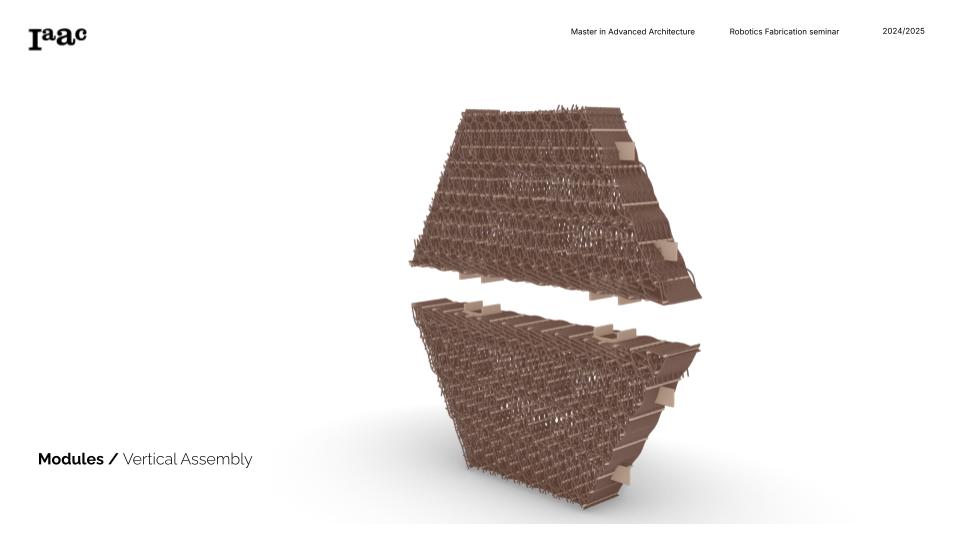
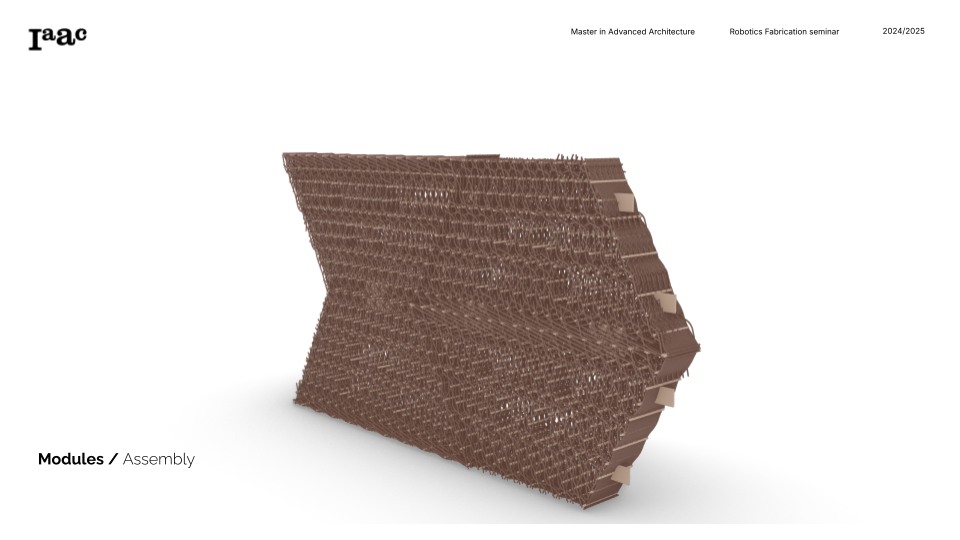
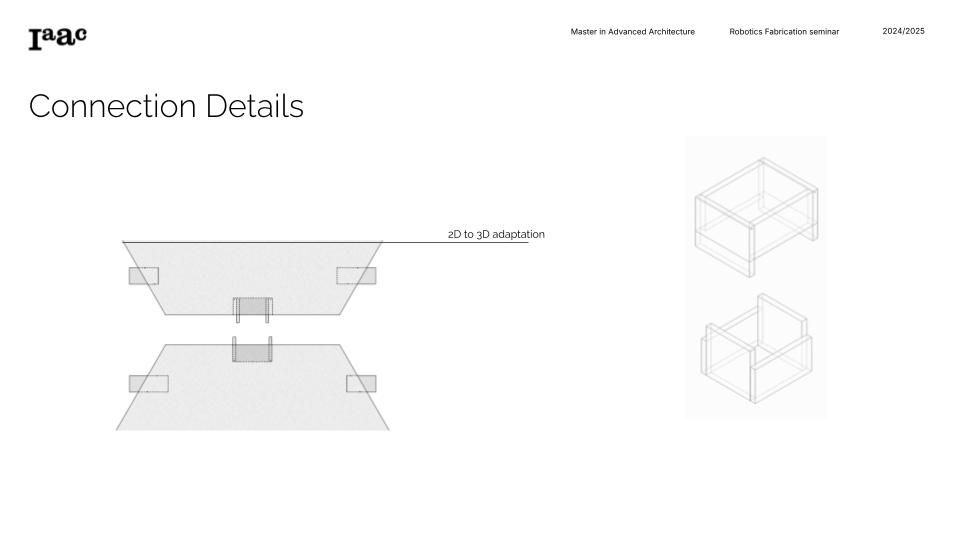
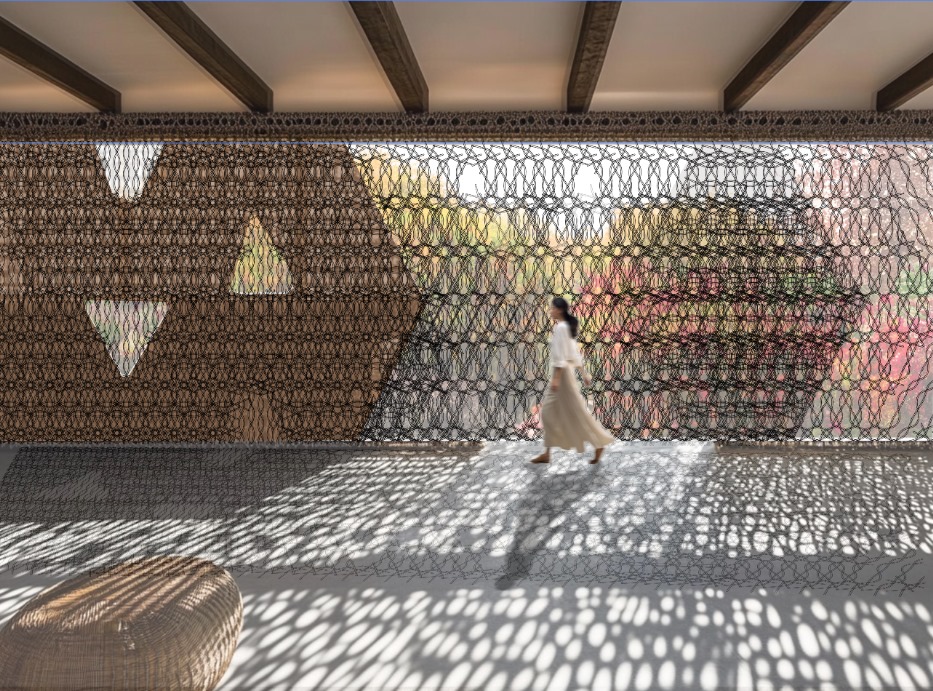
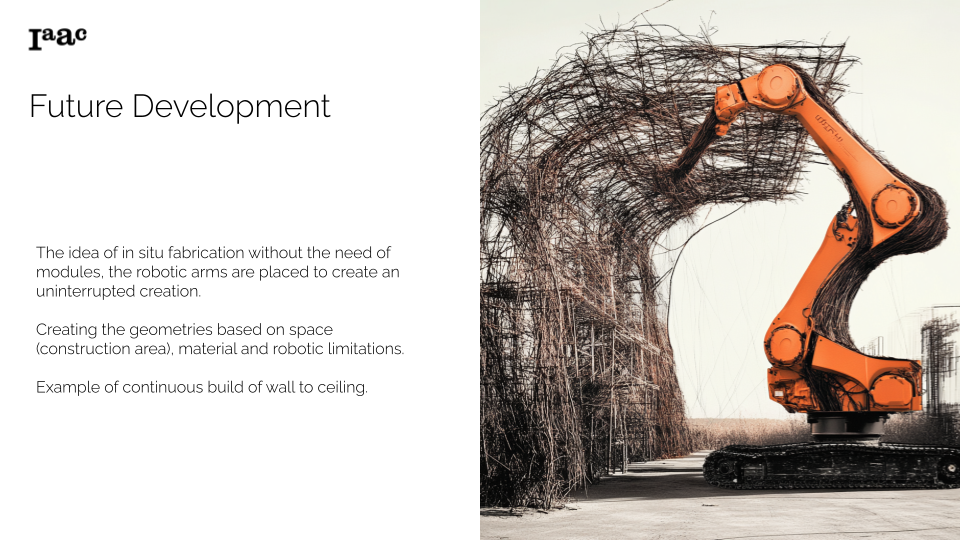
Moreover the students were instructed to prepare an architectural proposal that would expand the main idea of the module to an idea that could have a future developement.
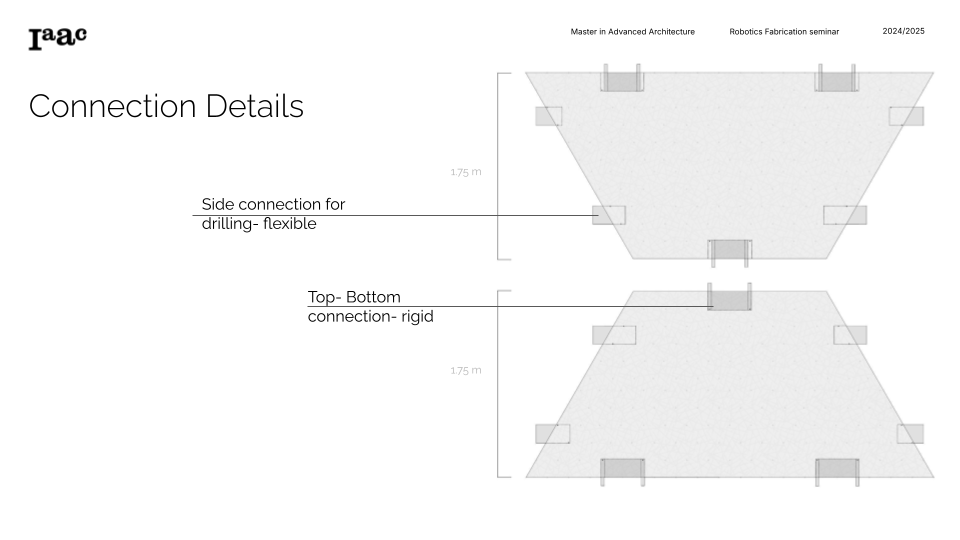
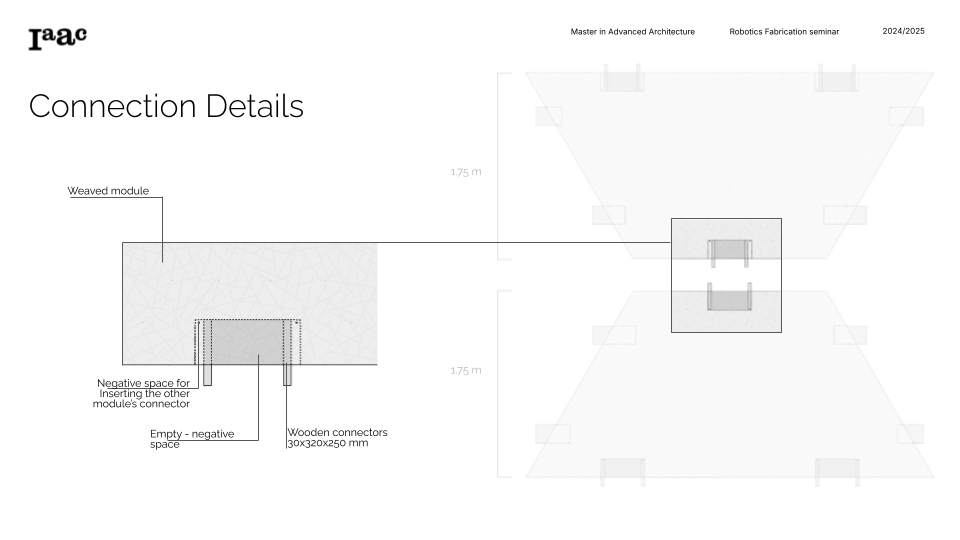
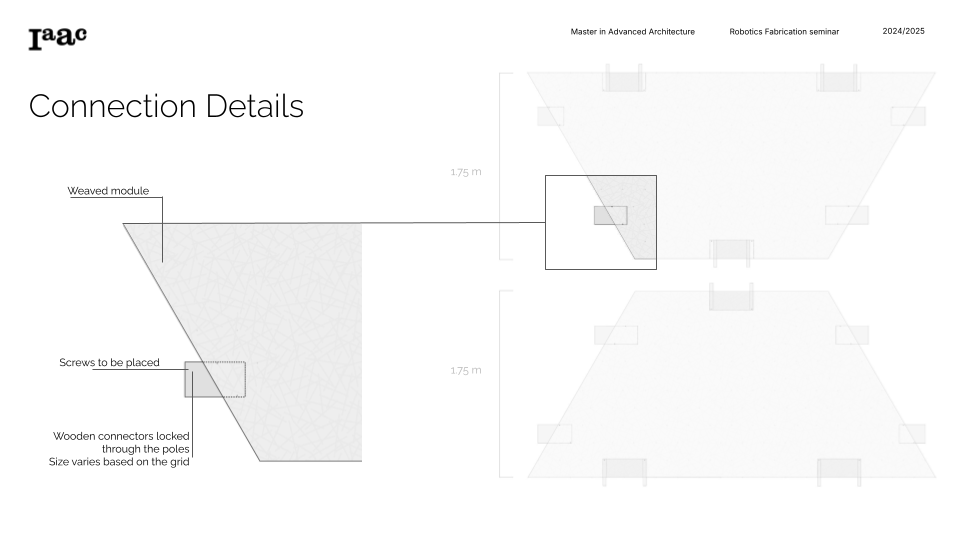
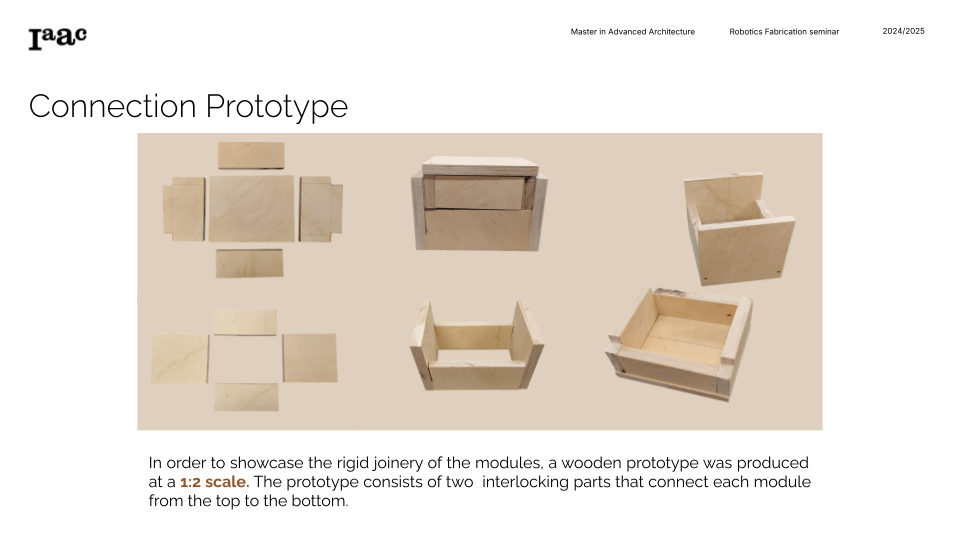
Connections:
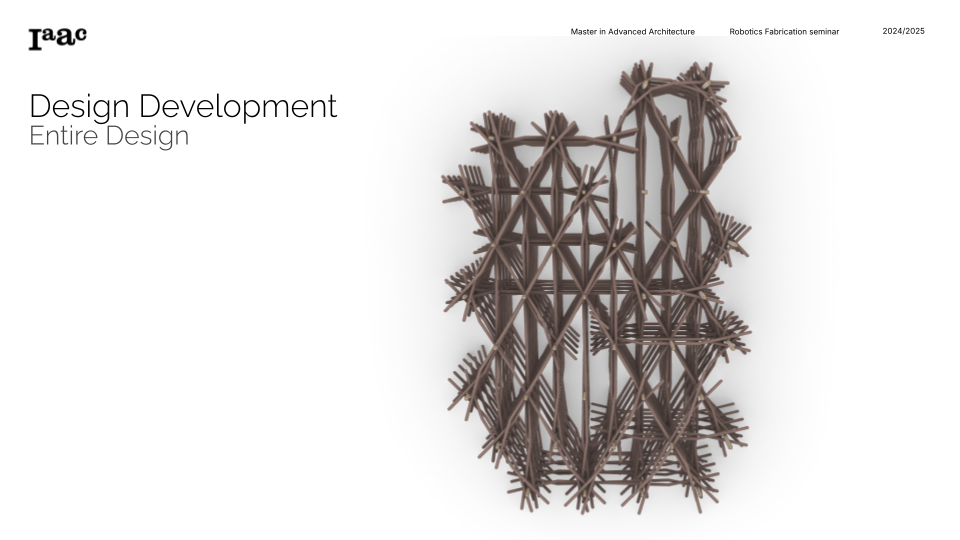
Render:
Robotic Simulation:



Video:
