
Robotic Brickwork Disassembly & Reassembly Enabled by Spatial Artificial Intelligence
In this blog post, we’re sharing the project we built during the IAAC 2026 Workshop 2.2 with the Augmented Fabrication Lab. Our main goal was to move beyond just designing on a computer and actually work with robots and smart sensors in the real world. We experimented with robotic fabrication and computer vision to see how machines can help us build more complex and interesting structures in real-time.
We started this project by working with standard construction blocks to identify physical damage, such as cracks, wear, color changes, and moisture. This led us to a key realization: we could use these ‘defects’ as actual design parameters.
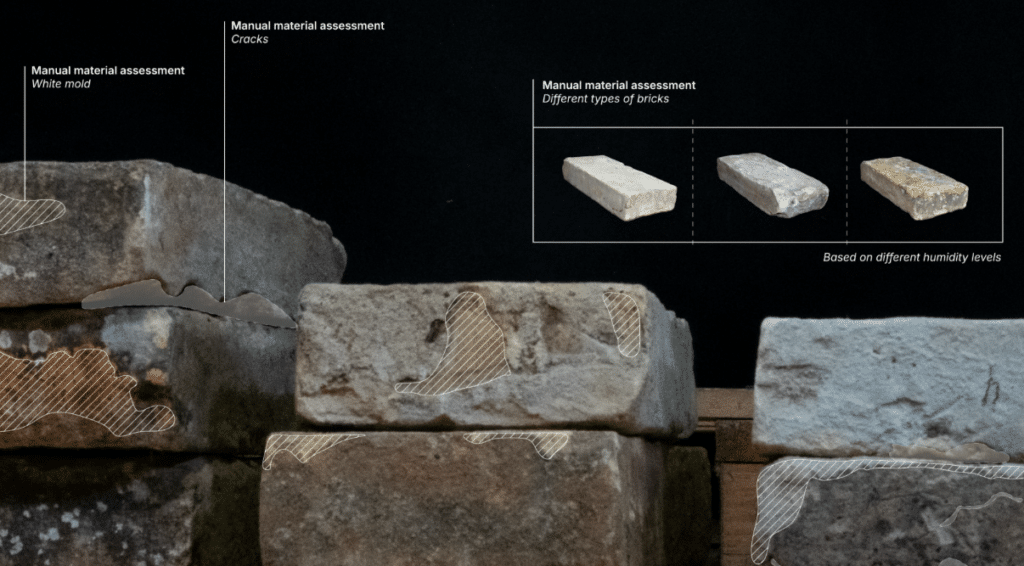
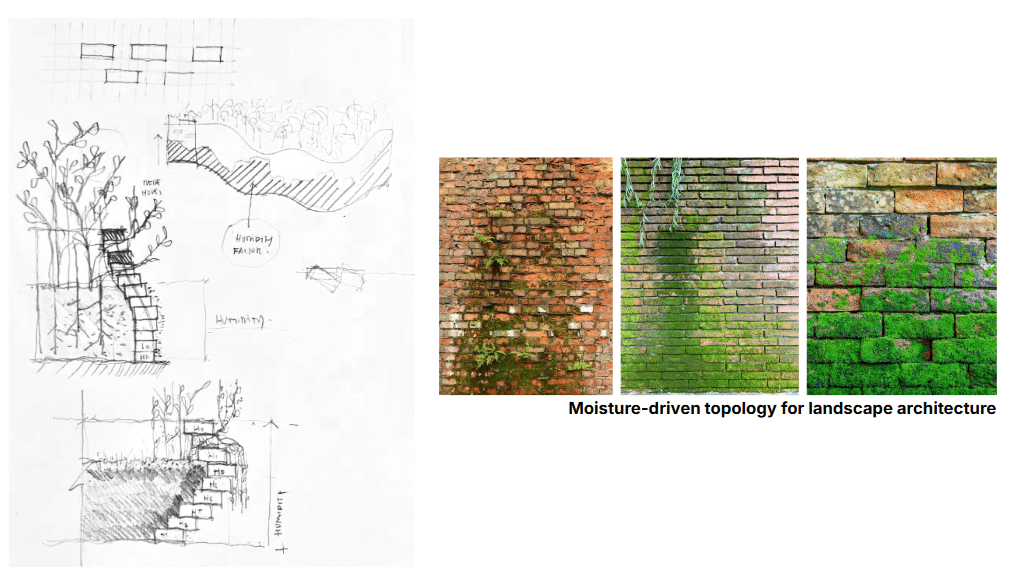
We decided to focus on moisture as a parametric strategy to visualize how a building changes over time. By using the local climate and humidity, we can create a nutrient-rich environment that allows natural moss and plants to grow directly on public facades, turning the wall into a living, evolving ecosystem.
MATERIAL EVALUATION
Our workflow begins with an automated material evaluation phase. Utilizing a robotic arm equipped with a specialized gripper, we perform a pick-and-place operation to systematically disassemble the block structure. Each unit is transported to a dedicated imaging station, where an end-effector camera captures the block from two distinct angles to map its five exposed faces. Following this, the robot positions each block onto a pallet for organized storage.
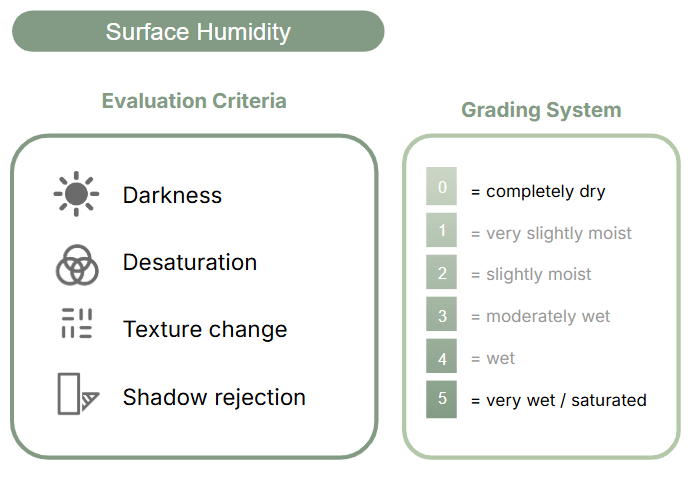
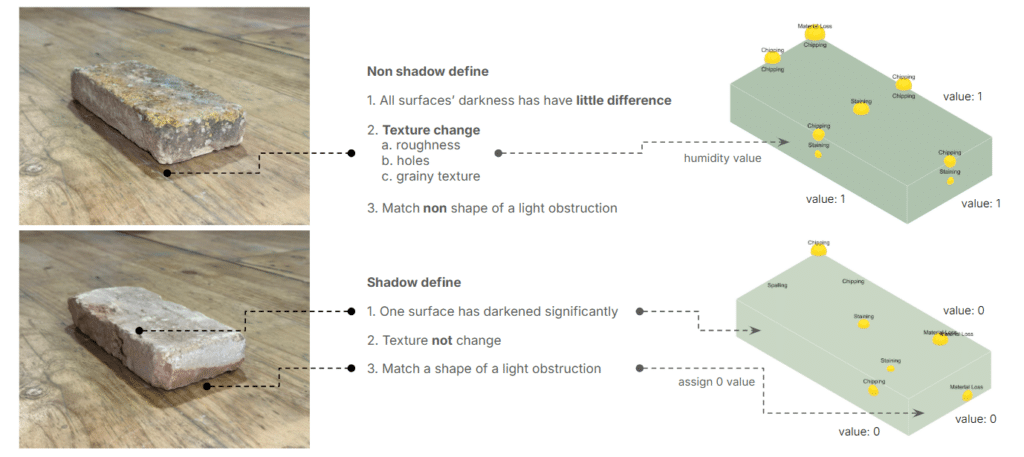
This process generates a structured digital database where we apply specific AI prompts to guide the computer vision analysis. The AI evaluates four key visual descriptors—Darkness, Desaturation, Texture Change, and Shadow Rejection to quantify moisture levels. The final output is a JSON file containing the precise technical details of every block.
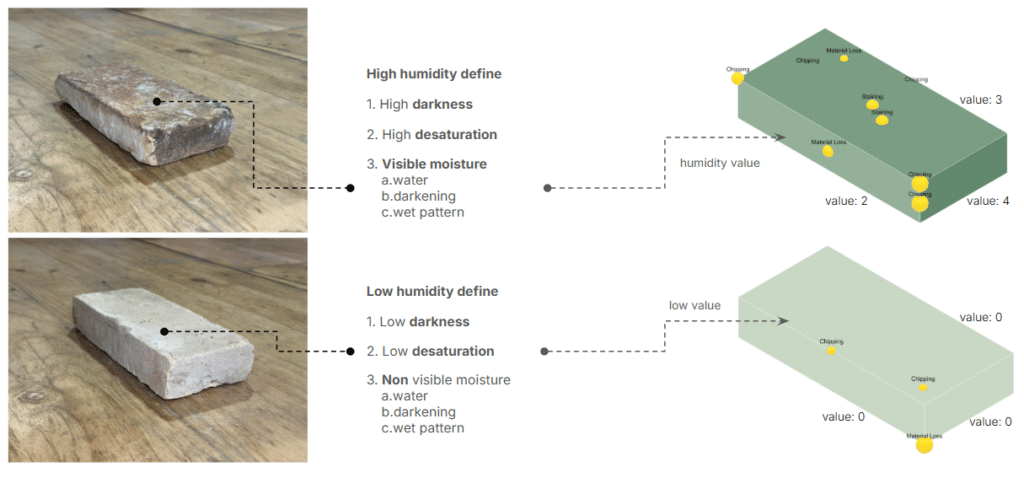
This data allows us to implement a Parametric Grading System, classifying each unit on a scale from 0 (Completely Dry) to 5 (Saturated). Within our methodology, these values are not seen as material defects; instead, high humidity ratings are treated as bioreceptive design opportunities, identifying the optimal zones for the natural colonization of moss and vegetation in the final structure.
The following key findings and outputs were established during our research:
SURFACE HUMIDITY SCHEMA
SHADOW AND NOISE FILTERING RULES
REASEMBLY STRUCTURE
Following characterization, we enter the Reassembly Structure stage. We utilize the JSON dataset to drive the architectural design via GenAI or Algorithmic modeling. With moisture as the primary design driver, the final geometry is programmed to evolve over time. The assembly is treated as a living system rather than a static object; its visual density and biological growth are dictated by the moisture percentages mapped during the initial phase, allowing the facade to transform in response to its environment.
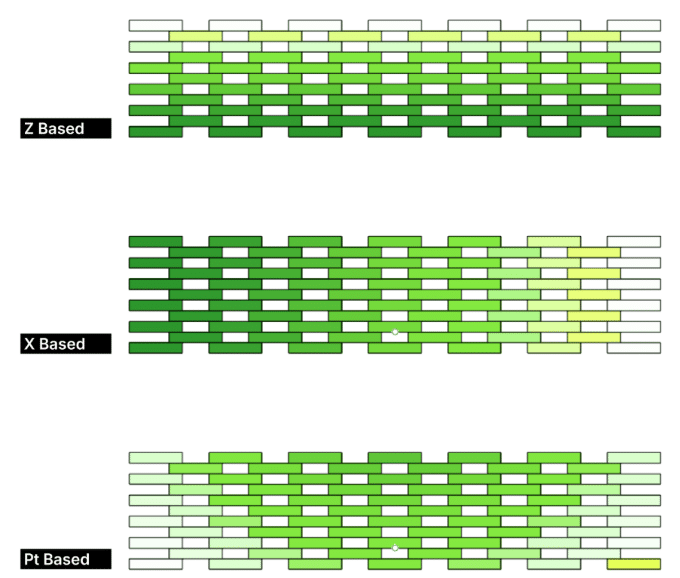
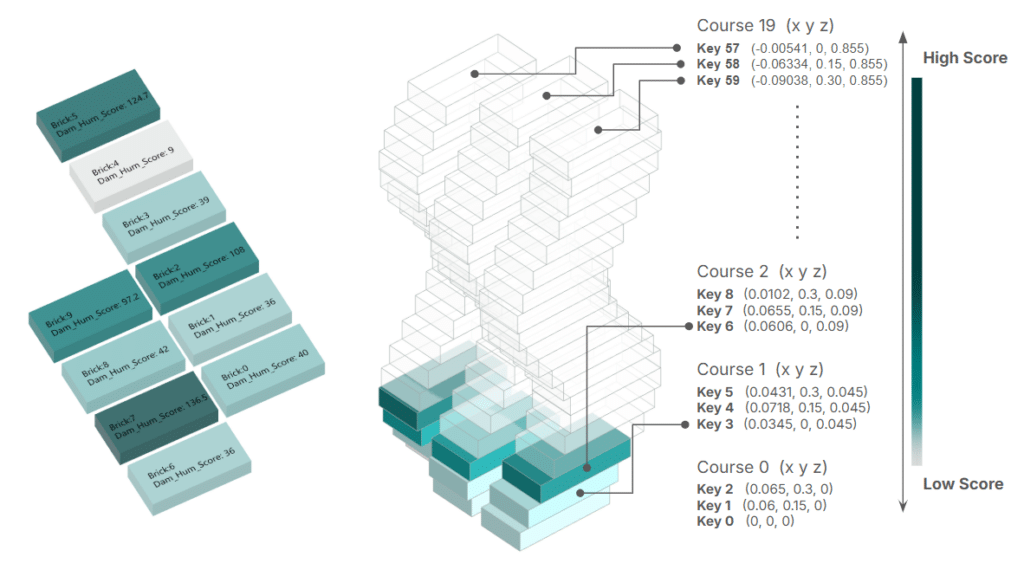
This diagram illustrates our parametric design strategy, where moisture levels dictate the spatial organization of the blocks. Each variation explores a different distribution logic, optimizing the assembly to create specific microclimates. By adjusting the positioning and orientation of the units, we can control water retention and light exposure, ensuring the facade evolves as a living, biological system.
.
Initial iterations using Generative AI to translate the JSON dataset into formal geometries yielded unsatisfactory results:

Consequently, we pivoted to an algorithmic approach, allowing for more precise control over the parametric distribution and ensuring the design accurately reflects the moisture data:

ASSEMBLY EXPLORATION:

Drawing from the processed data, the reassembly strategy is defined as follows:
MATERIAL POPULATION
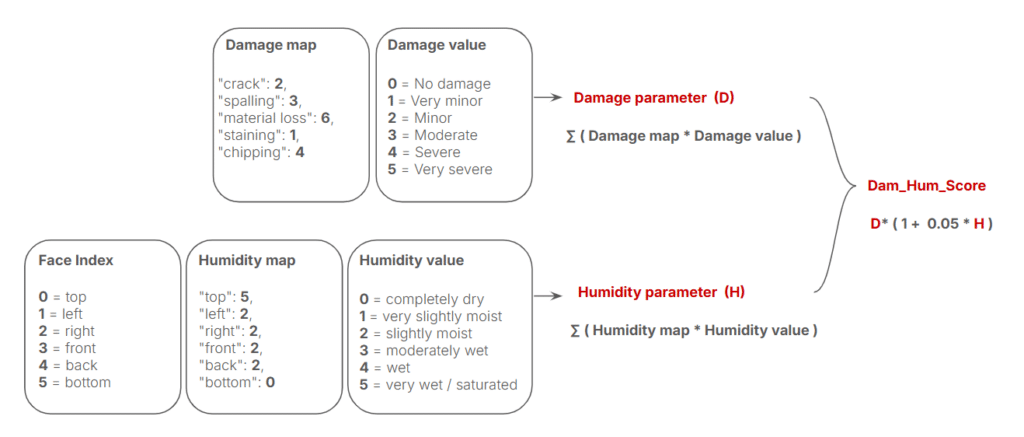
The final stage, Material Population, involves assigning a definitive score to each block based on the initial AI evaluation criteria. Using the data extracted from the visual analysis—specifically darkness, desaturation, texture, and shadow rejection—we execute a weighted calculation to determine a final moisture value. This quantitative result allows us to accurately populate the facade, strategically placing each unit to optimize its bioreceptive performance and long-term biological evolution.
Assembly selected + Score criteria:
.
.
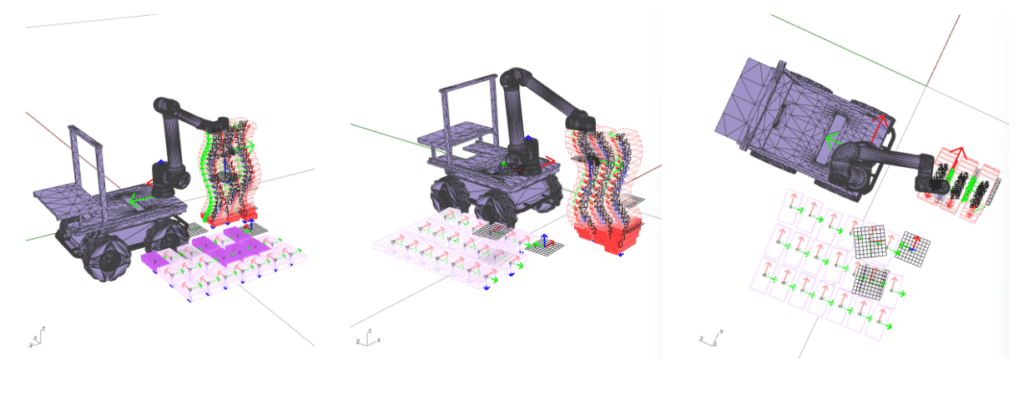
With the distribution finalized, we initiate the robotic assembly through a real-time connection. The robotic arm executes the algorithmic design, precisely placing each categorized block to construct the final living structure. This seamless integration between the digital dataset and robotic execution ensures that the calculated moisture gradients are accurately translated into the physical environment.
RESULTS
FUTURE IMPLEMENTATIONS:

