
Faculty: Nacho Monereo & Prottay Roy Chowdhury
Guest Artist: Maria Mallo
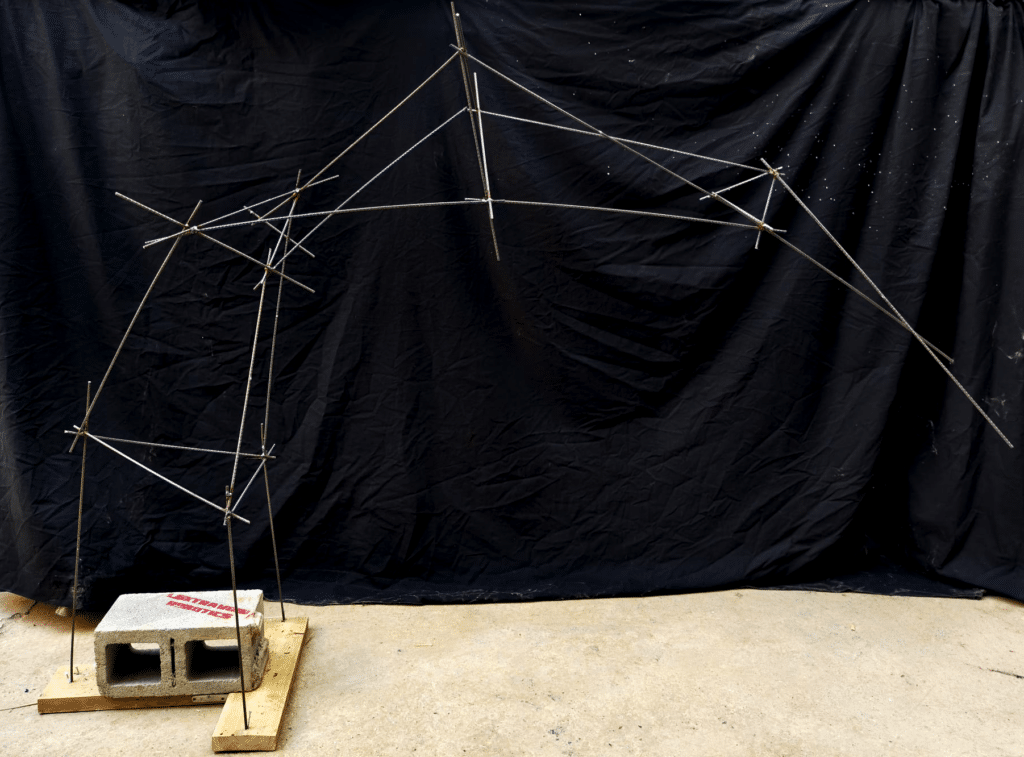
The project focused on creating a dynamic feedback loop between digital design, robotic positioning, and human craftsmanship. Instead of treating the robot as a fully autonomous machine, the workflow emphasized continuous interaction and mutual dependency between human and machine during fabrication.

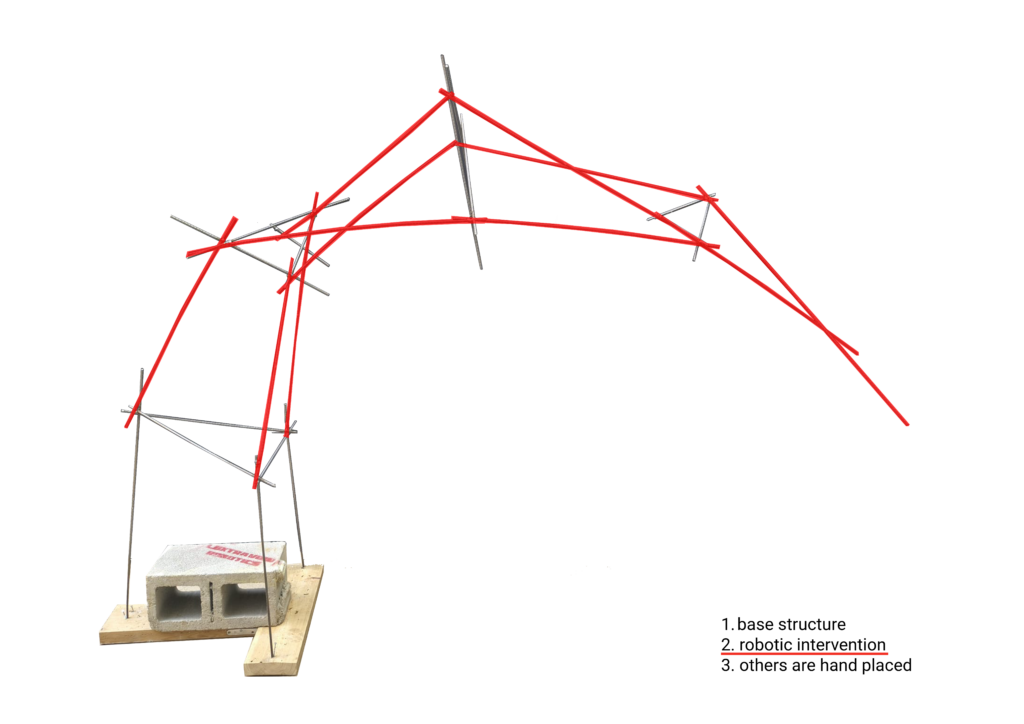
The installation was fabricated from 6 mm steel rods using a hybrid workflow combining robotic placement and manual welding. A UR10e robotic arm equipped with a custom mechanical gripper positioned the rebars in space, while human collaborators manually welded and adjusted the structure in real time. The resulting process became an evolving negotiation between digital intention and physical reality.
Workflow Logic
- Initial geometry generation in Grasshopper
- Calibration using HTC Vive spatial markers
- Robotic placement of steel rods
- Human welding and manual adjustment
- Measurement and scanning of physical deviations
- Recalibration of the digital model
- Continuous recursive feedback loop between physical and digital states
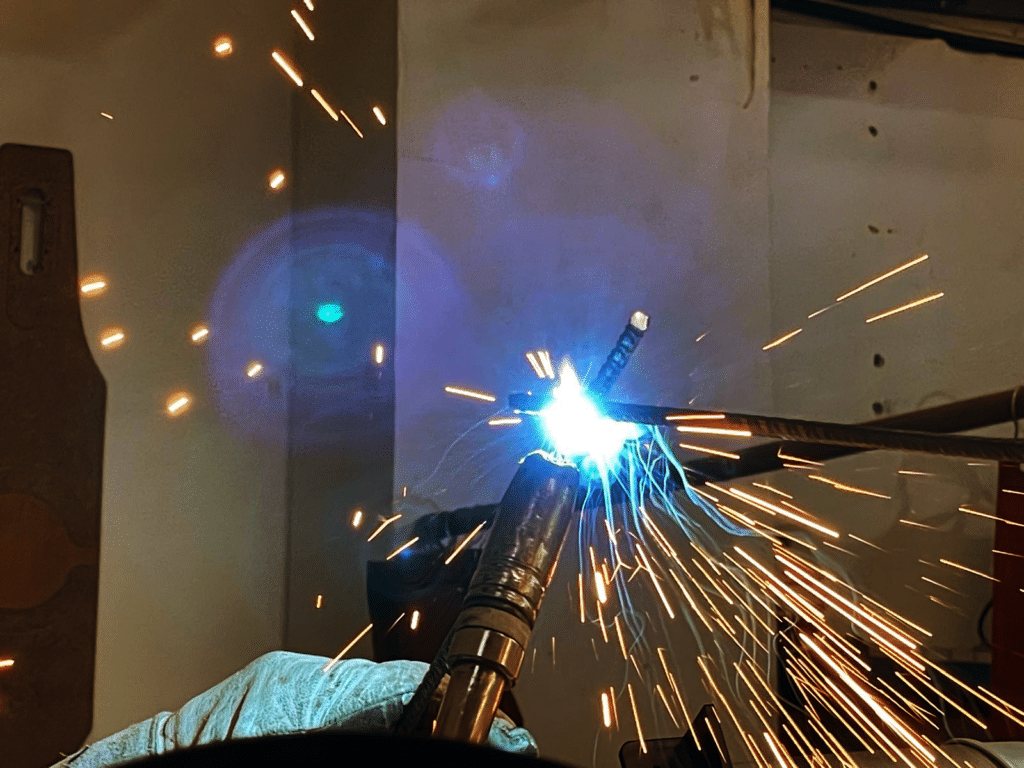
Welding requires intuition, focus, and calmness to transform raw surfaces into expression
With our senses we have a deep internalised understanding of the material’s state that the robot’s senses must be taught to identify. For example if a rebar joint is welded and then gravity weakens this connection a human can easily scan this visually and react.
The robot is able to move the rebar to a precise point in space and then able to hold indefinitely as opposed to the fatigue humans sill face.
This can also be achieved with a jig but the robot is able to move in 6 axis’s and be programmed to quickly change position if needed especially when realities such as gravity affecting the rebar affect the planned input positions.

A major focus of the research was adaptive interaction between digital and physical systems. HTC Vive sensors and WebSocket communication enabled live calibration between the computational model and the physical structure.
The workshop highlights the potential of human-robot collaboration as a tool for creating more flexible, intelligent, and expressive fabrication methods in architecture and design. By embracing imperfection and unpredictability, the project suggests new possibilities for future construction systems where technology enhances human creativity instead of replacing it.

