
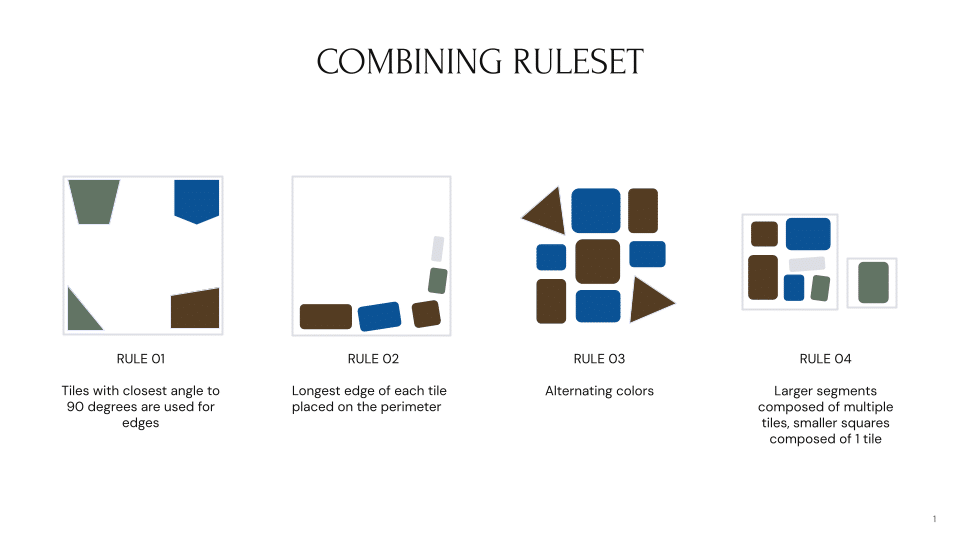
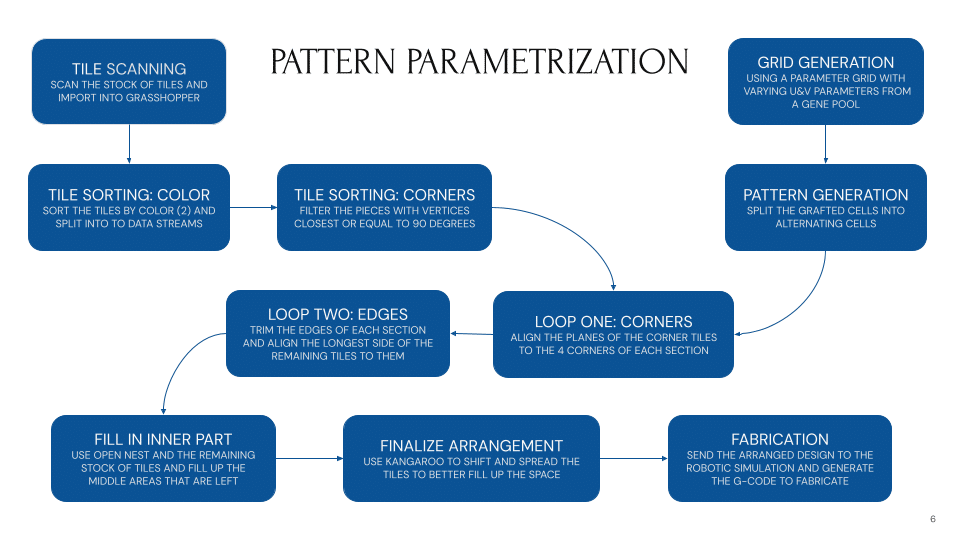
This workshop explored robotic trencadís through a pick and place system. Broken tiles were scanned and organized using a Grasshopper ruleset inspired by traditional weaving logics. Squares with 90 degree corners, straight edges, and alternating colors structured the design. A looping algorithm selected tiles from the dataset and placed them without repetition, allowing the robot to assemble unique patterned compositions from irregular fragments.
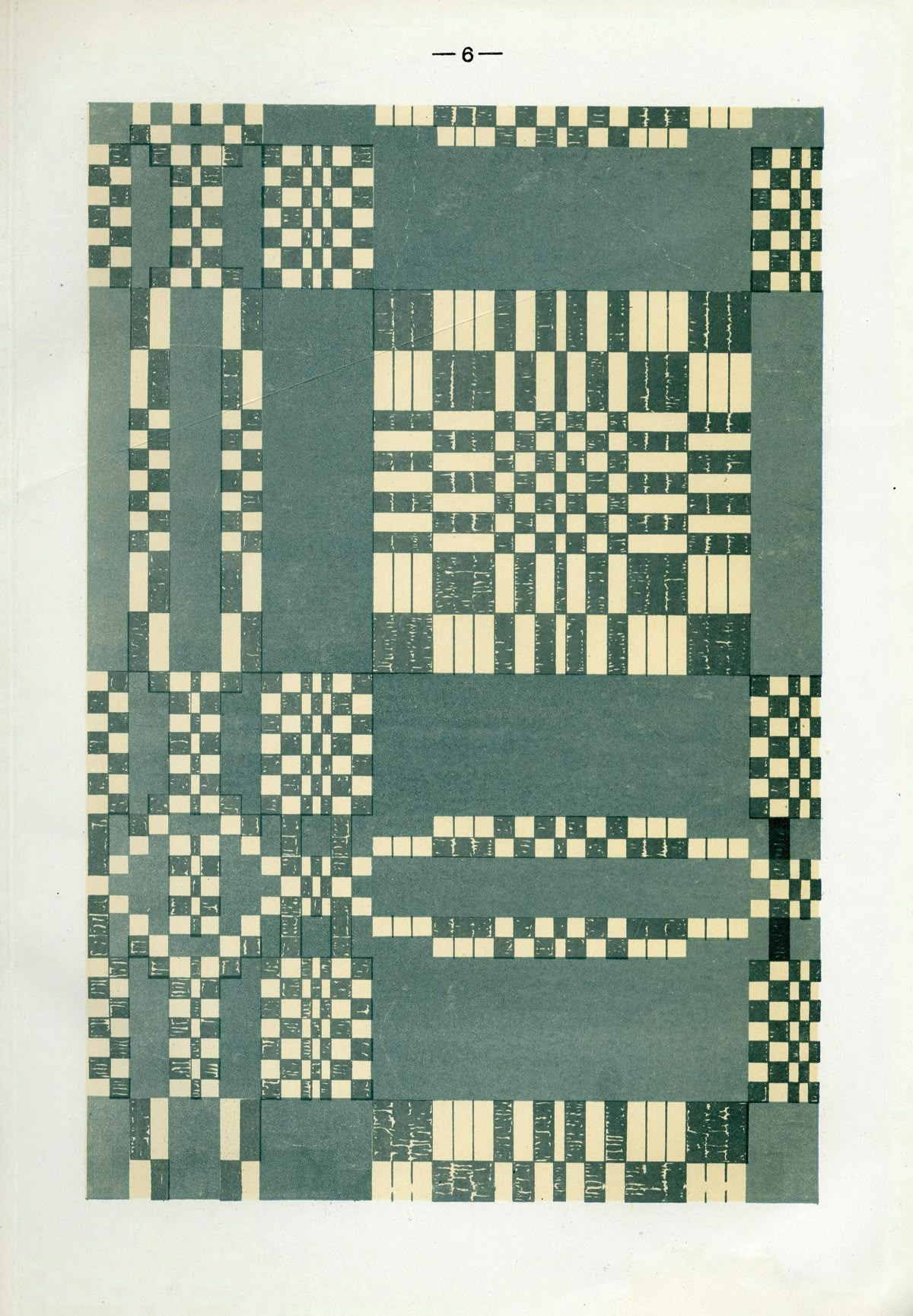
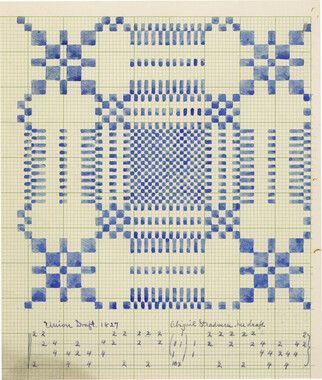
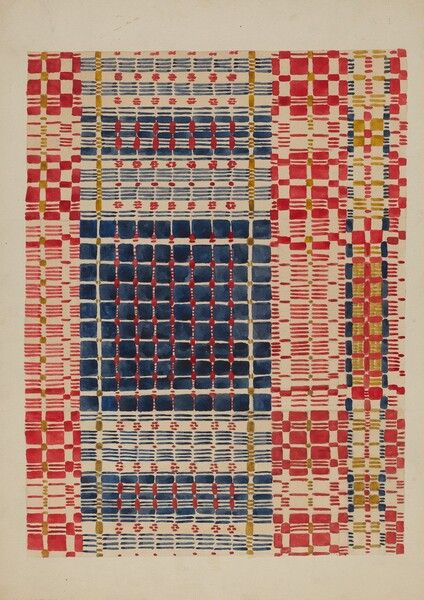
Our main design inspiration was artisanal weaving. We were inspired by its capacity of intertwining artistry with a very systemic production. This was the core of what what we wanted to achieve: a beautiful design with a complex Grasshopper logic.
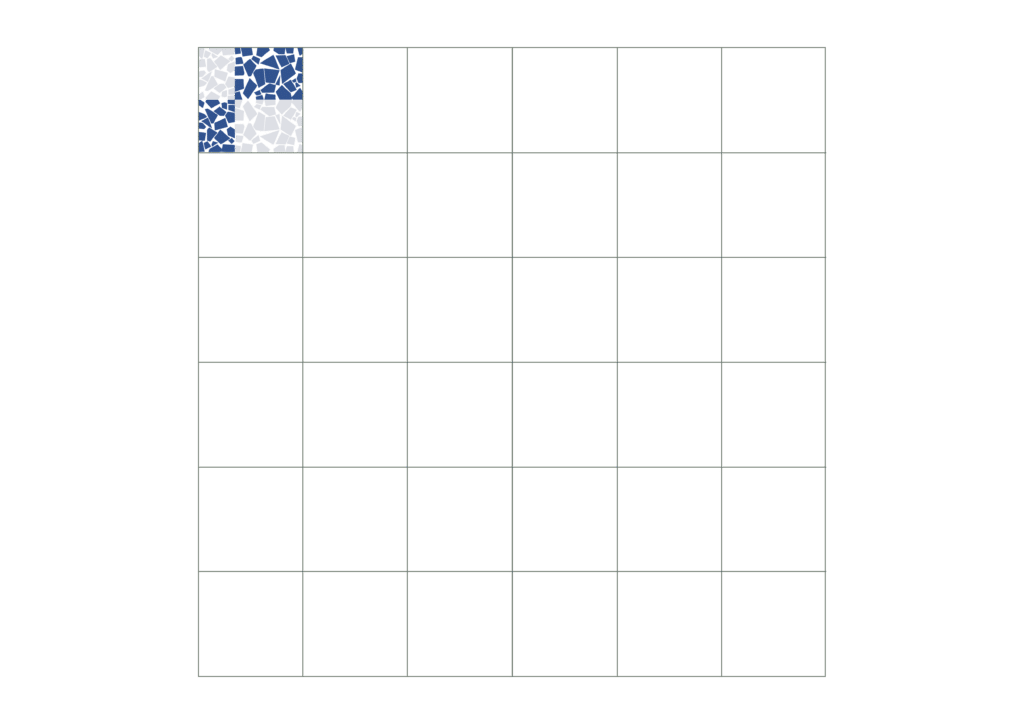
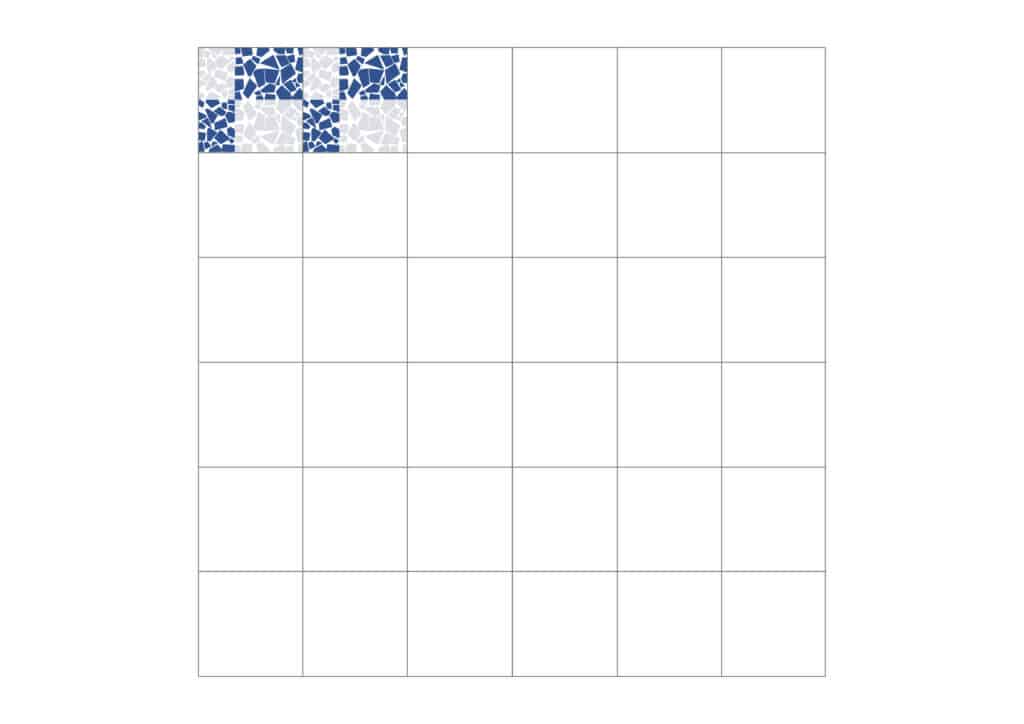
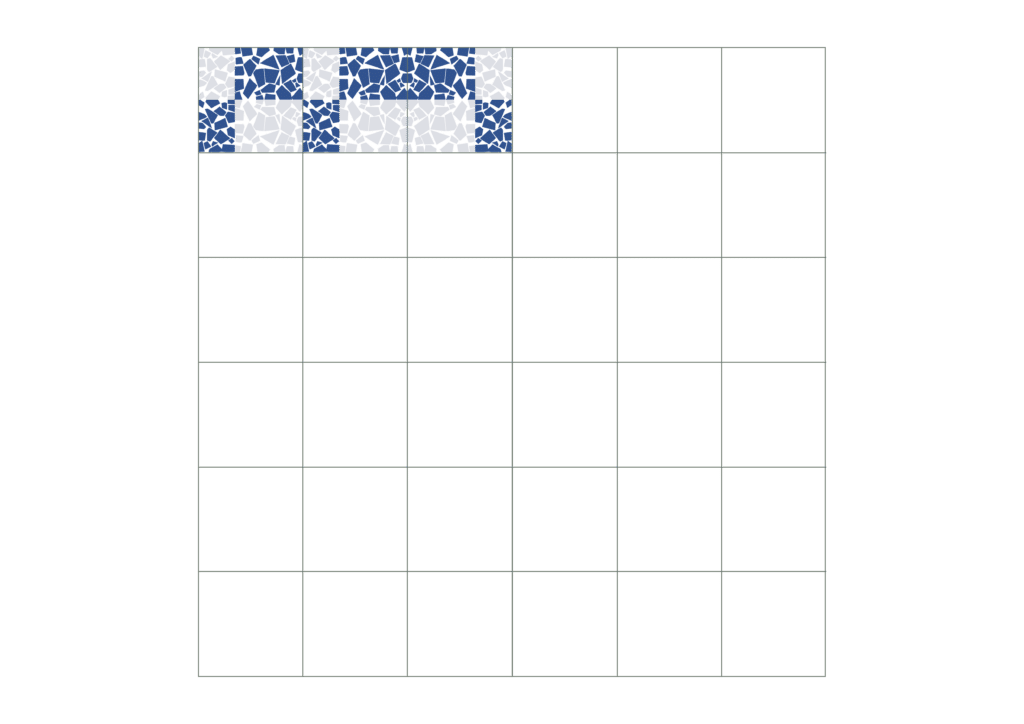

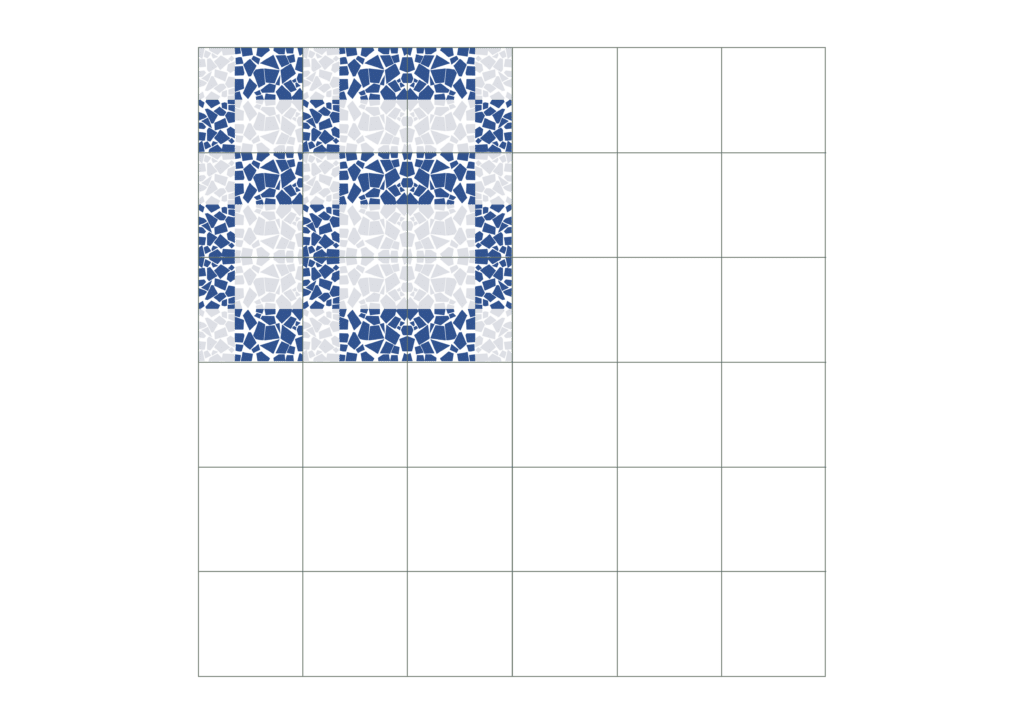
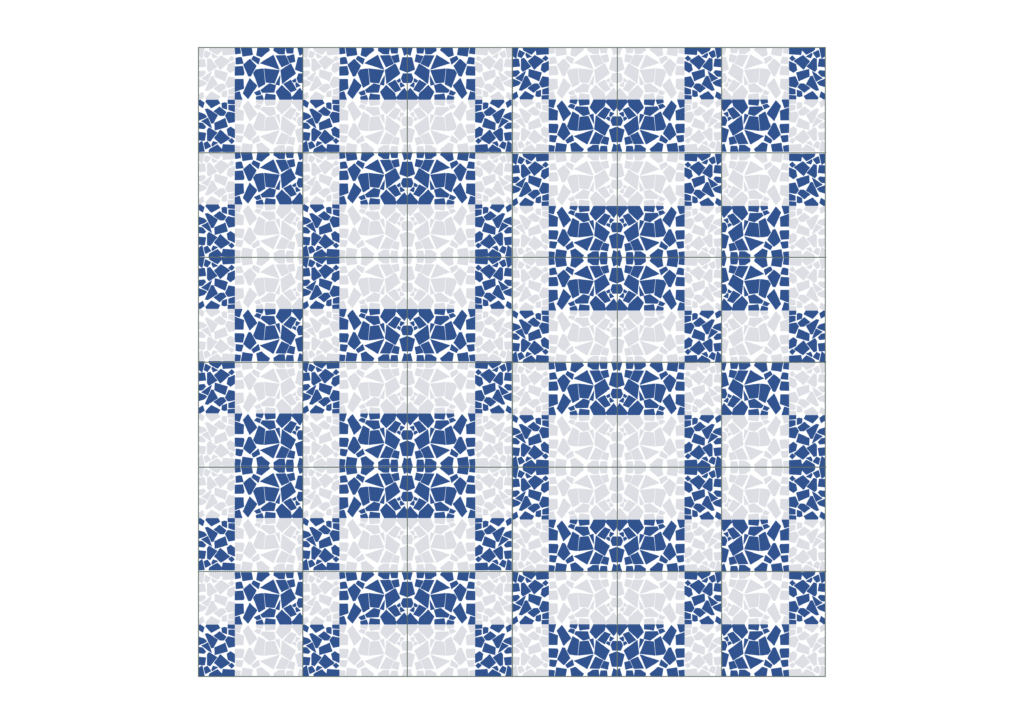
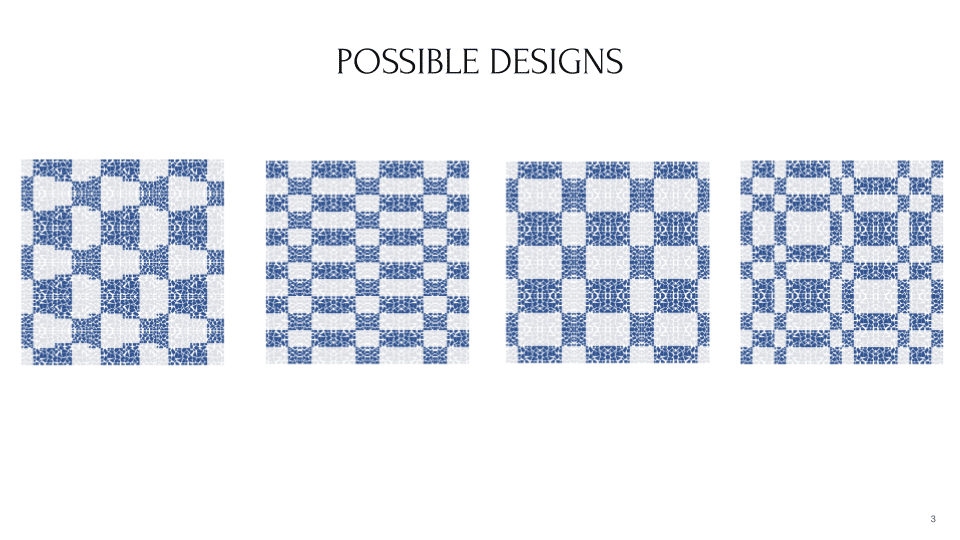
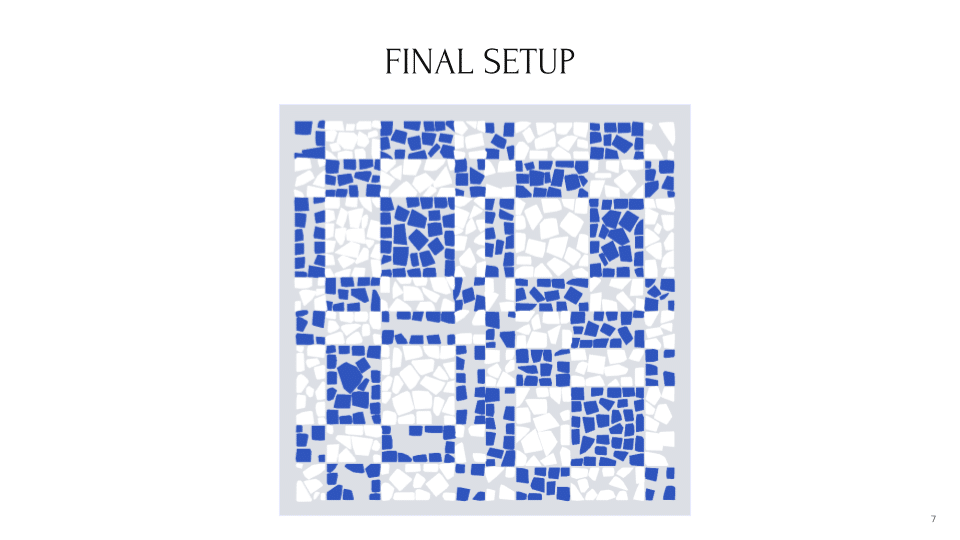
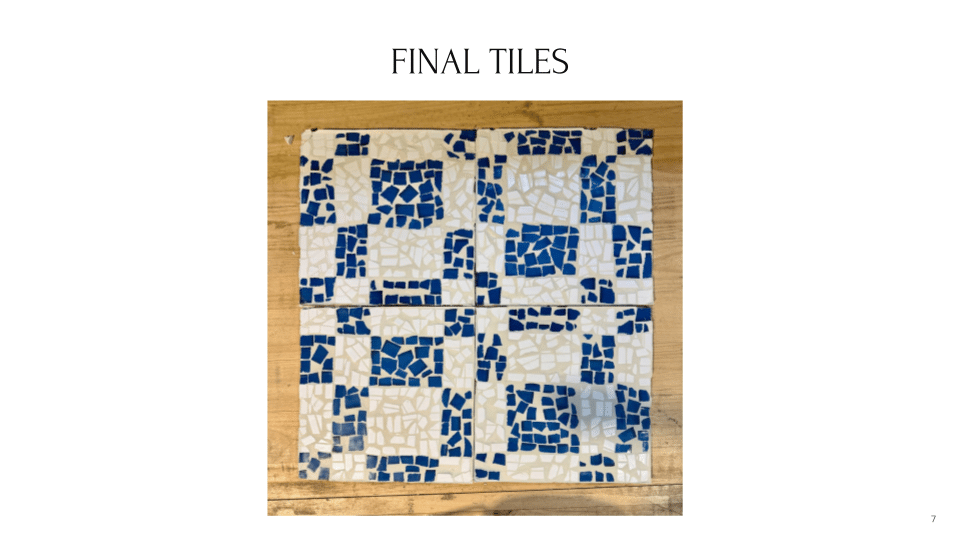
We first designed a single tile, and from there found many ways of transforming it through rotation and reflection in order to obtain a global design that resembled a intricate woven piece.
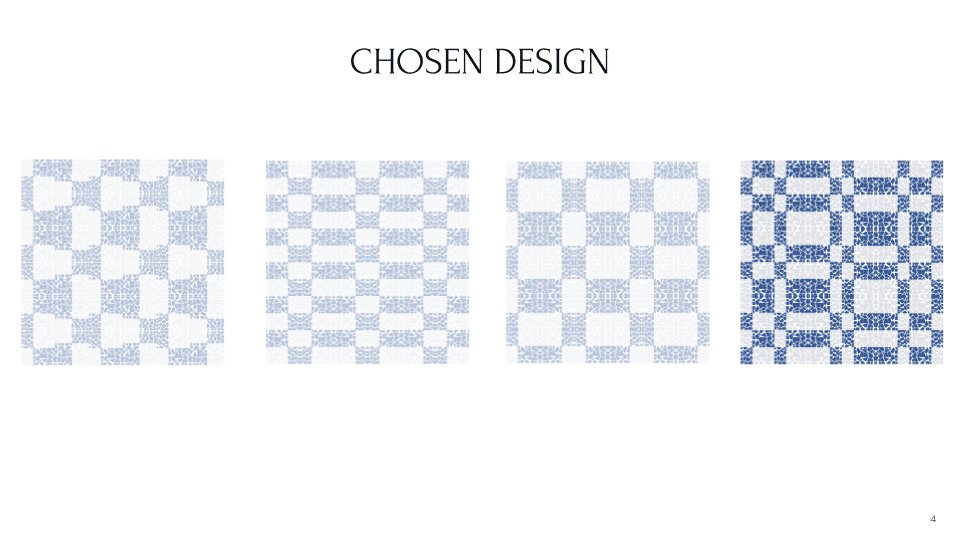
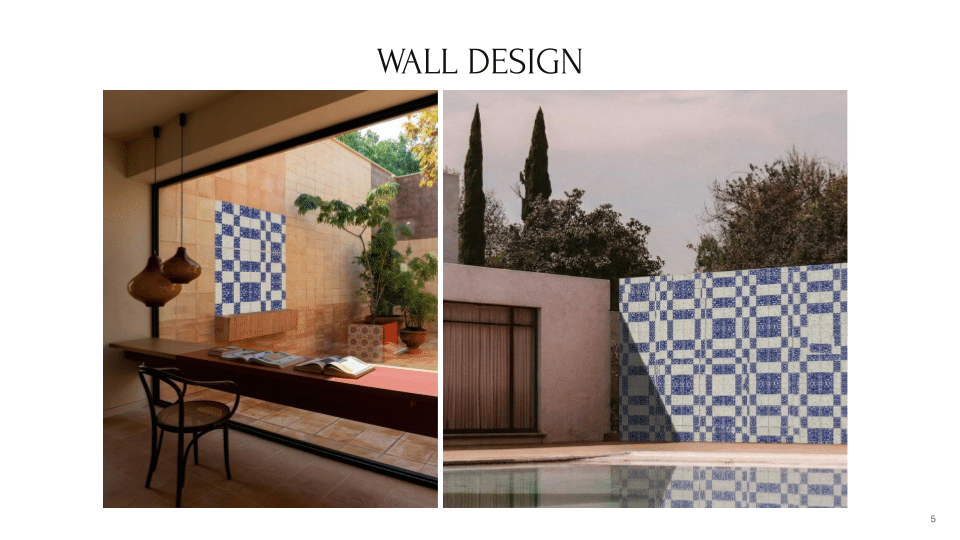
We imagine this tiling system as a statement wall or floor in someone’s home. It can even be presented as an artwork.
This video shows the process of fabrication of a 1m2 tiling system.
