
Robotic Disassembly& Reassembly with Spatial AI
In this blog post, we’re presenting the project developed during IAAC 2026 Workshop 2.2 in collaboration with the Augmented Fabrication Lab. Our focus was to step beyond purely digital design and engage directly with physical processes, using robotic systems and sensor-based feedback. Through hands-on experimentation with robotic fabrication and computer vision, we explored how machines can actively participate in shaping material behavior and enable the creation of more responsive and complex structures in real time.
Project Goals
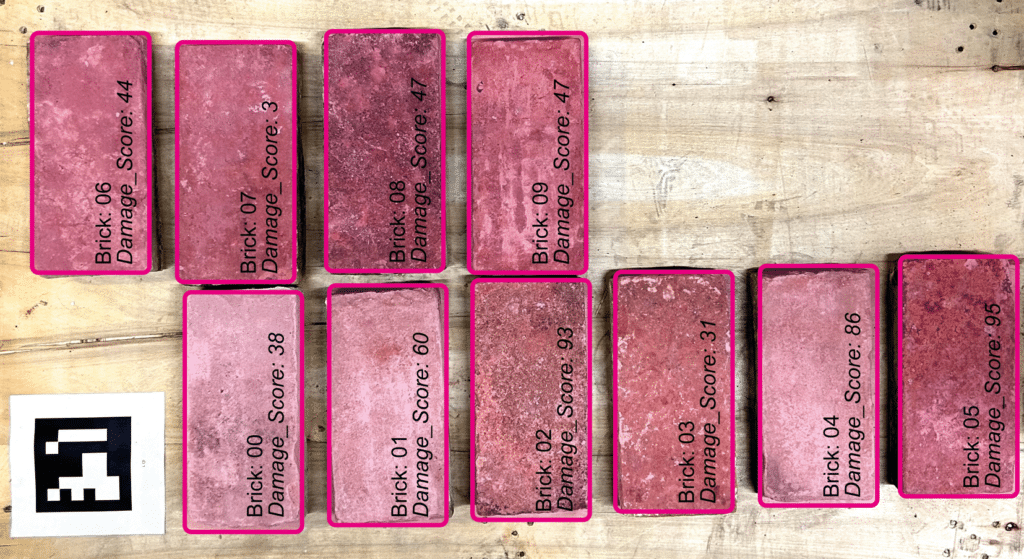
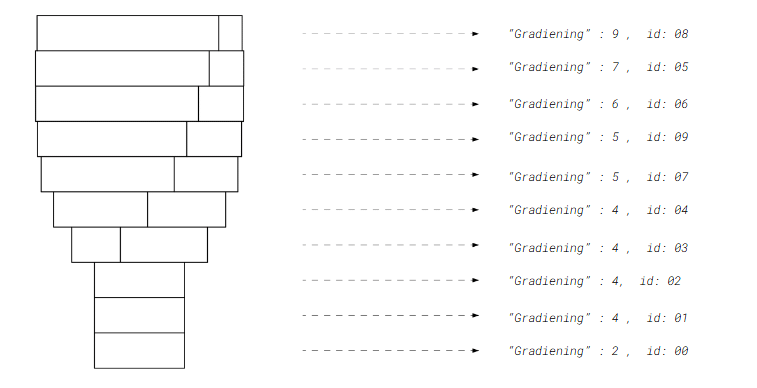
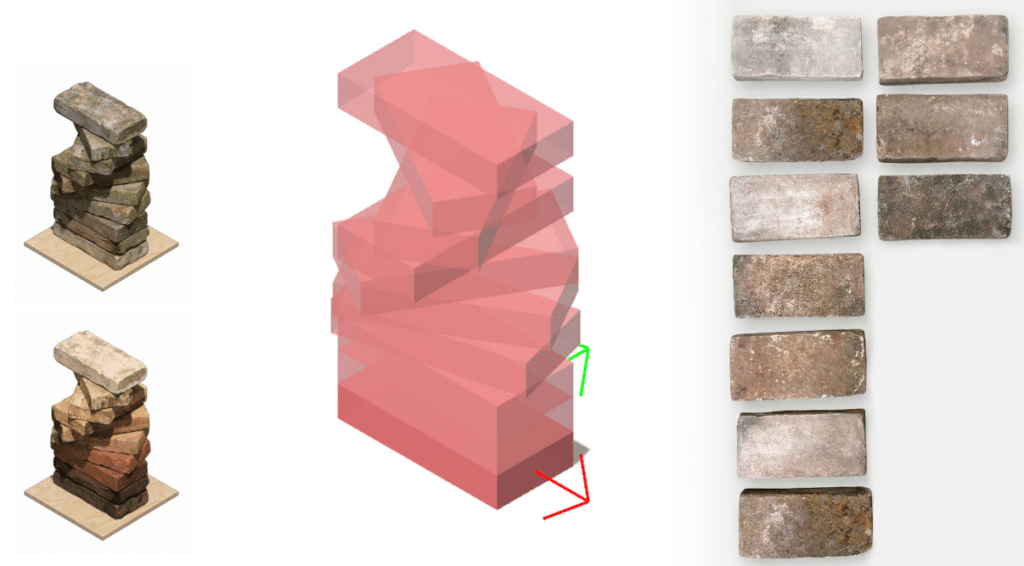
The project focuses on understanding, evaluating, and reusing existing construction materials through a systematic process. First, all bricks involved in the structure are identified and cataloged to establish a clear material inventory. Next, each brick is carefully assessed to determine its condition, distinguishing between intact, damaged, and reusable elements. Based on this analysis, decisions are made regarding their structural viability. Finally, the structure is disassembled and reconfigured, allowing the materials to be reorganized into a new form, demonstrating the potential for adaptive reuse and circular construction practices.

Object Perception
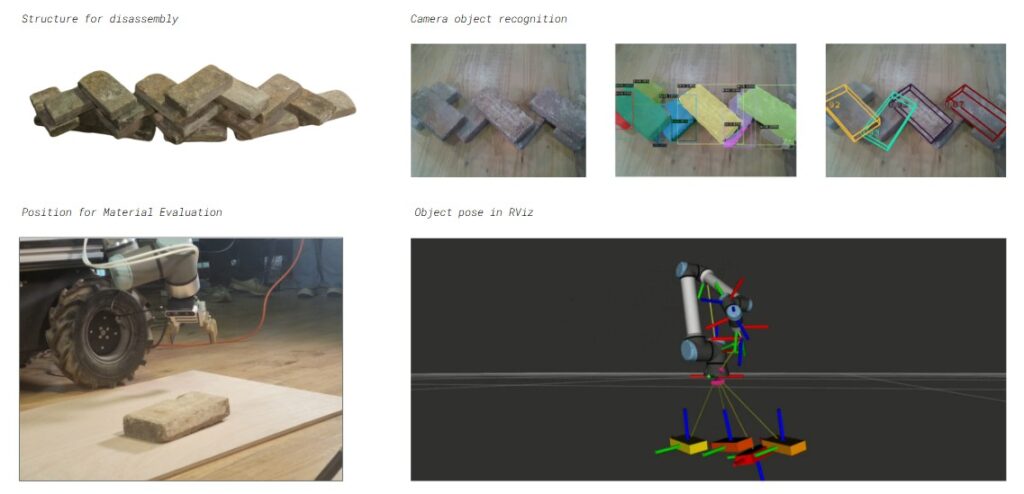
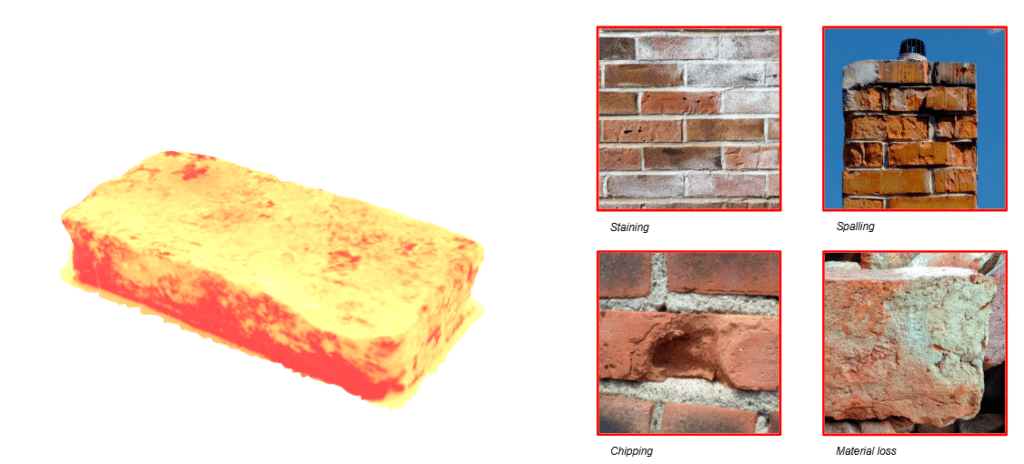
Material Evaluation
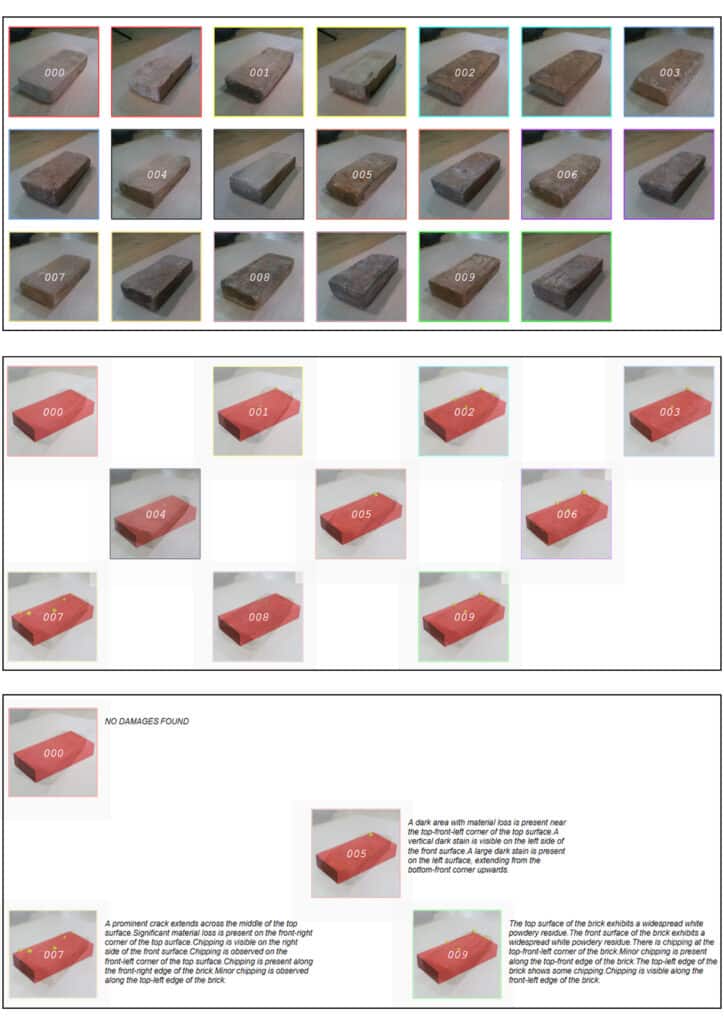
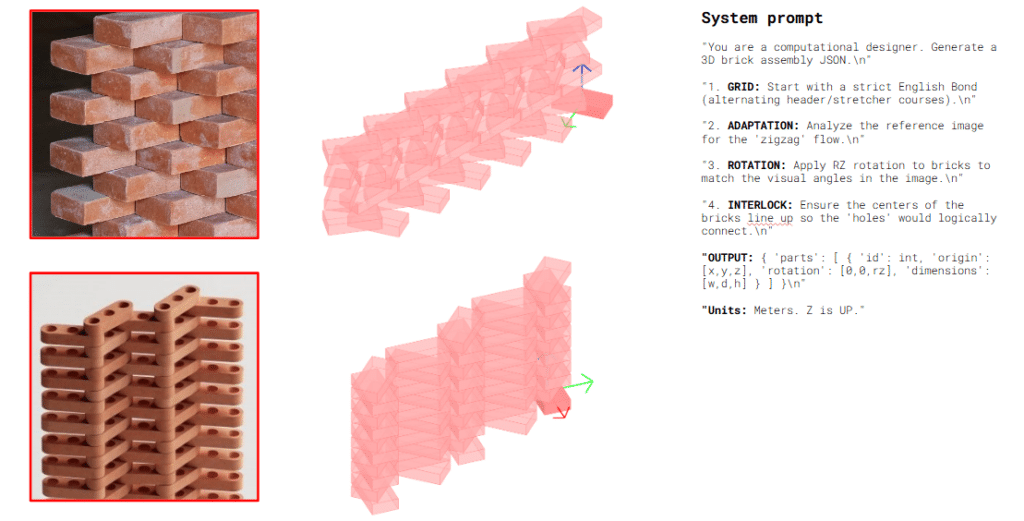
Generative AI
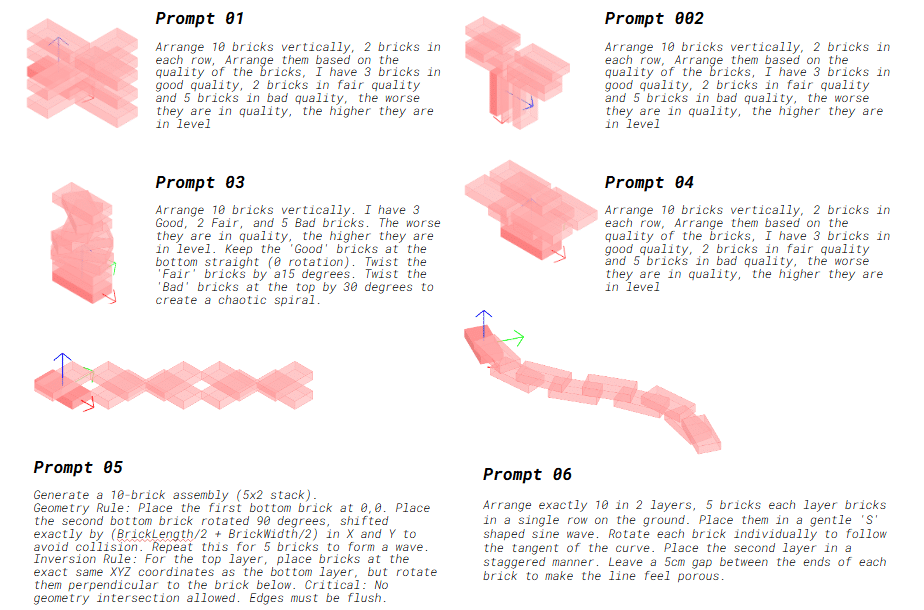
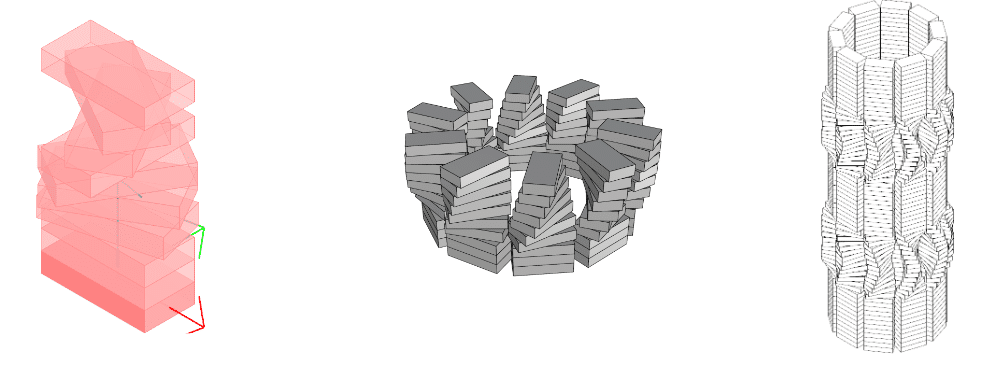
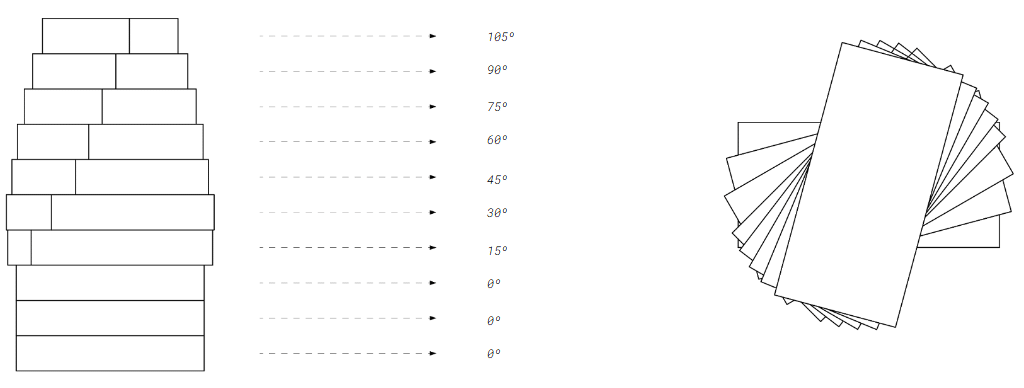
Reassembly Assignment


FUTURE IMPLEMENTATIONS

