Introduction
This workshop explores new modes of architectural production through active collaboration between humans and robots, shifting away from traditional models of automation toward hybrid systems of shared decision-making. Rather than understanding the robot as a fully autonomous tool, it is framed as an agent that cooperates with the human in real time, creating a fabrication process based on dialogue, adaptability, and continuous feedback.
Throughout the workshop, the concept of Human-in-the-Loop (HITL) is investigated, where human intervention is not only necessary but fundamental to the final outcome. This approach embraces the inherent uncertainty of material processes—such as deviations in manual welding—and focuses on developing systems capable of integrating, rather than eliminating, these variables. In this context, the human body, movement, and perception become essential inputs within the design and fabrication process.

Project
A Human-Scale Shell Constructed Through Human–Robot Collaboration
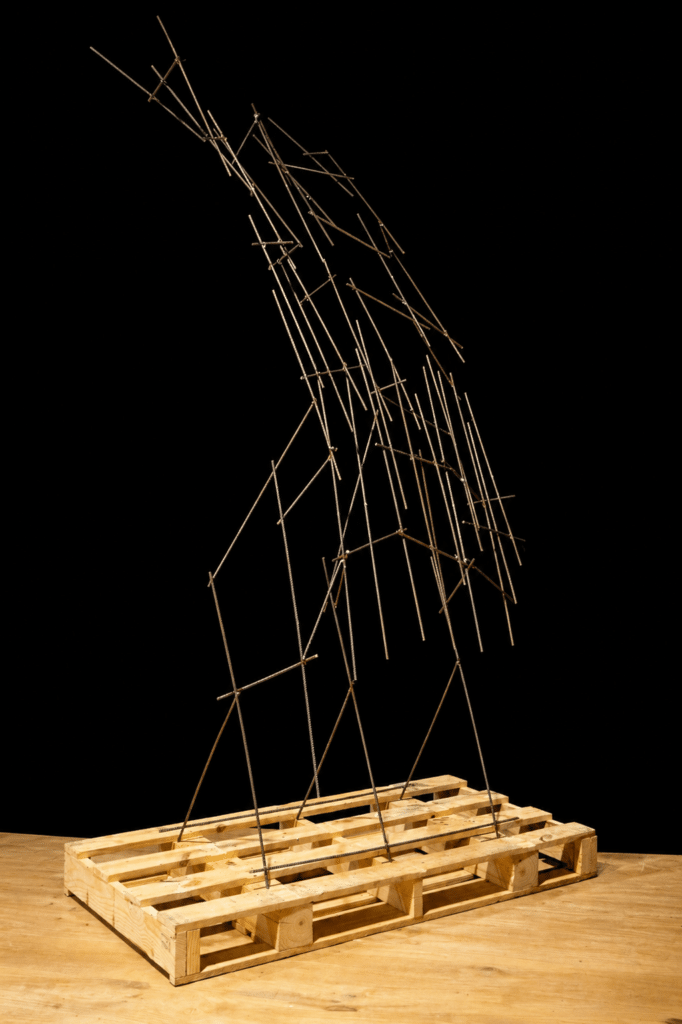
The project was conceived as an exploration of how architecture could be built from the inside out. Rather than imagining a shelter as an object designed externally and assembled afterward, we were interested in the experience of inhabiting the space while it is being formed. This led us to the idea of a shell structure: an enclosure that grows progressively around the body, defining space through a continuous process of aggregation.
To materialize this concept, we introduced a UR robot as an assistant within the construction process. Rather than replacing human labor, the robot was understood as a collaborator capable of extending precision, reach, and repetition. While the human participant could make intuitive decisions, adapt the process, and respond to changing conditions, the robot contributed consistency and controlled movements during fabrication process.

Recursive Aggregation
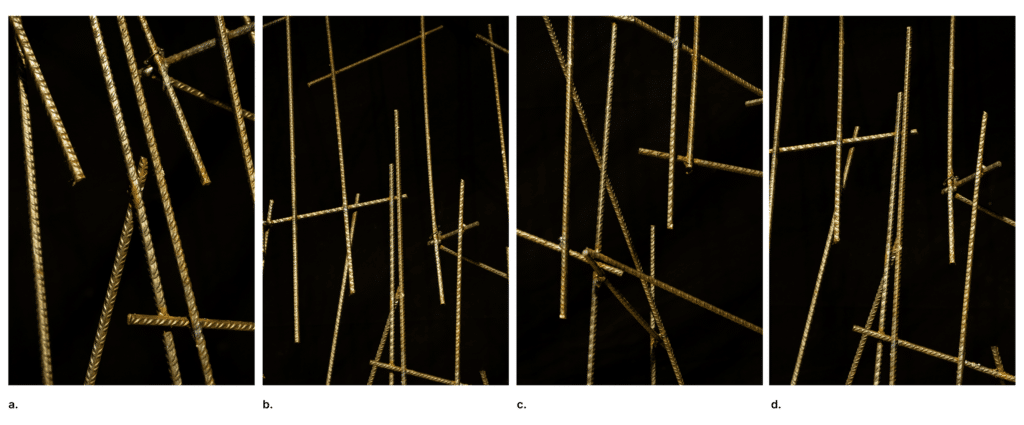
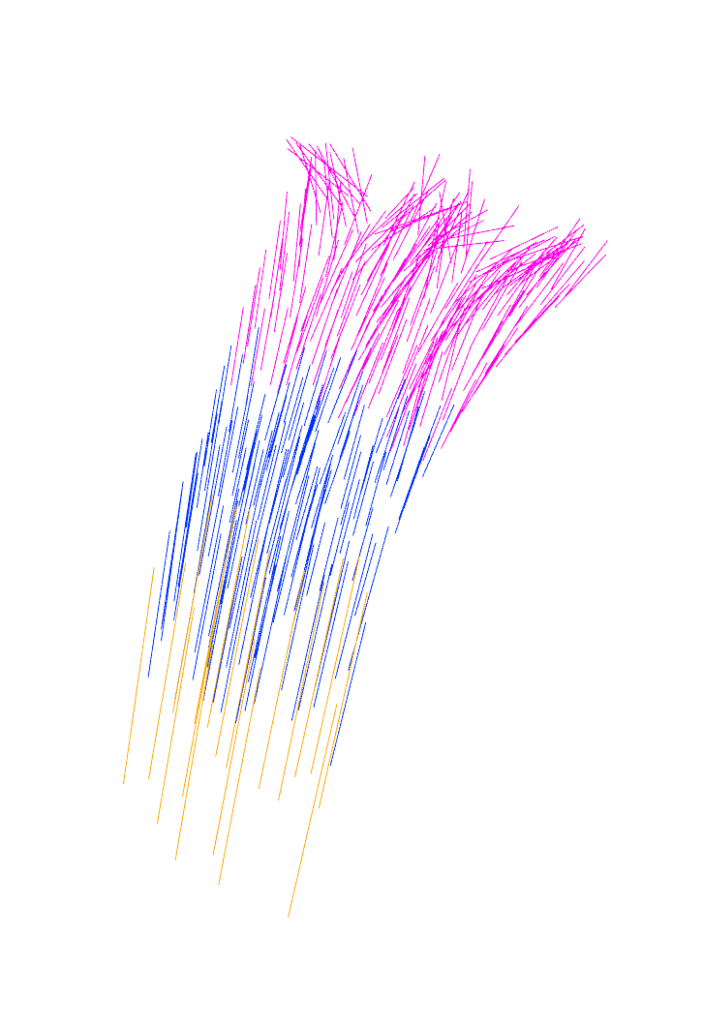
The recursive aggregation system begins by populating the shell geometry with a field of vertical vectors that follow its overall curvature. A controlled degree of randomness is introduced to soften the rigidity of the system, allowing the structure to move away from a purely mechanical logic and instead evoke qualities closer to human-made construction, while still operating within a defined set of rules.
The aggregation process is governed by three main principles. First, the initial vector field establishes a spatial framework of “allowed positions,” defining where elements can be placed. Second, the shell is progressively populated from lower to higher density using three discrete bar lengths (250 mm, 500 mm, and 750 mm), enabling variation while maintaining control over the system. Finally, the fabrication follows a proximity-based rule: each new element must be selected from the three closest available options to the current position. Within this constraint, the human makes the decision, and the robot executes it, reinforcing a collaborative loop between intuition and precision.
System Overview
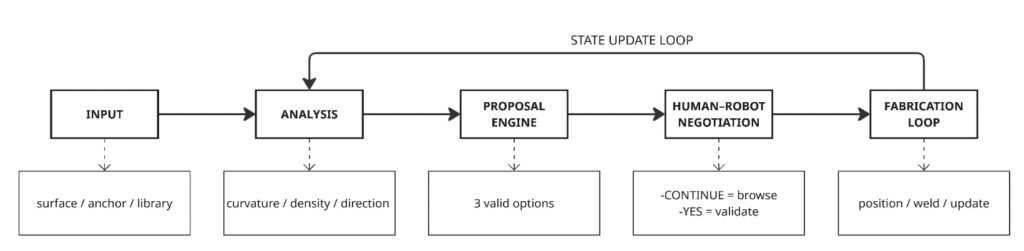
State Machine Logic

Human as a sensor
In most robotic cells the human sits downstream of the sensors — they read the dashboard and step in when something breaks. We inverted that: the human is the sensor. A single camera watches the hand, MediaPipe extracts 21 landmarks and a gesture label, and the system listens.
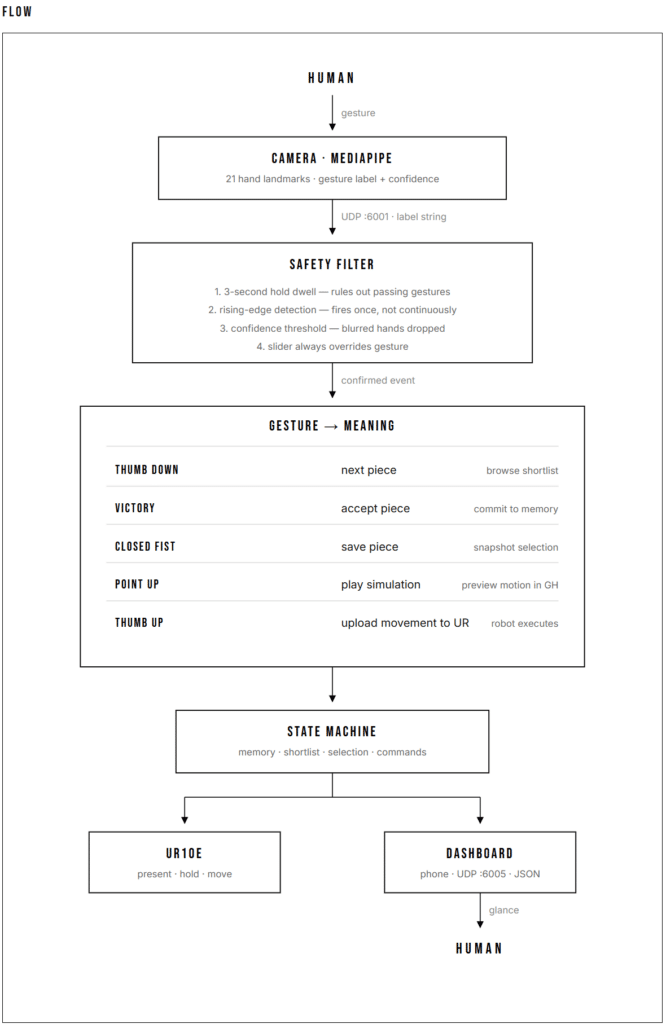
But a raw label is not a command. Between the hand and the robot sits a four-stage filter — a 3-second hold dwell to rule out passing gestures, rising-edge detection so each gesture fires once and not continuously, a confidence threshold to drop blurred frames, and a manual slider that always overrides vision. Only after the filter does a gesture earn its meaning:
- Thumb down — browse the next piece
- Victory — accept the piece into memory
- Closed fist — save the current selection
- Point up — play the simulation
- Thumb up — upload the motion to the robot
The state machine downstream never sees hands. It sees confirmed events. The robot doesn’t react to a body in the room — it reacts to a decision the human has already made. That is the inversion: the human is not assisting the system, the human is the input layer.
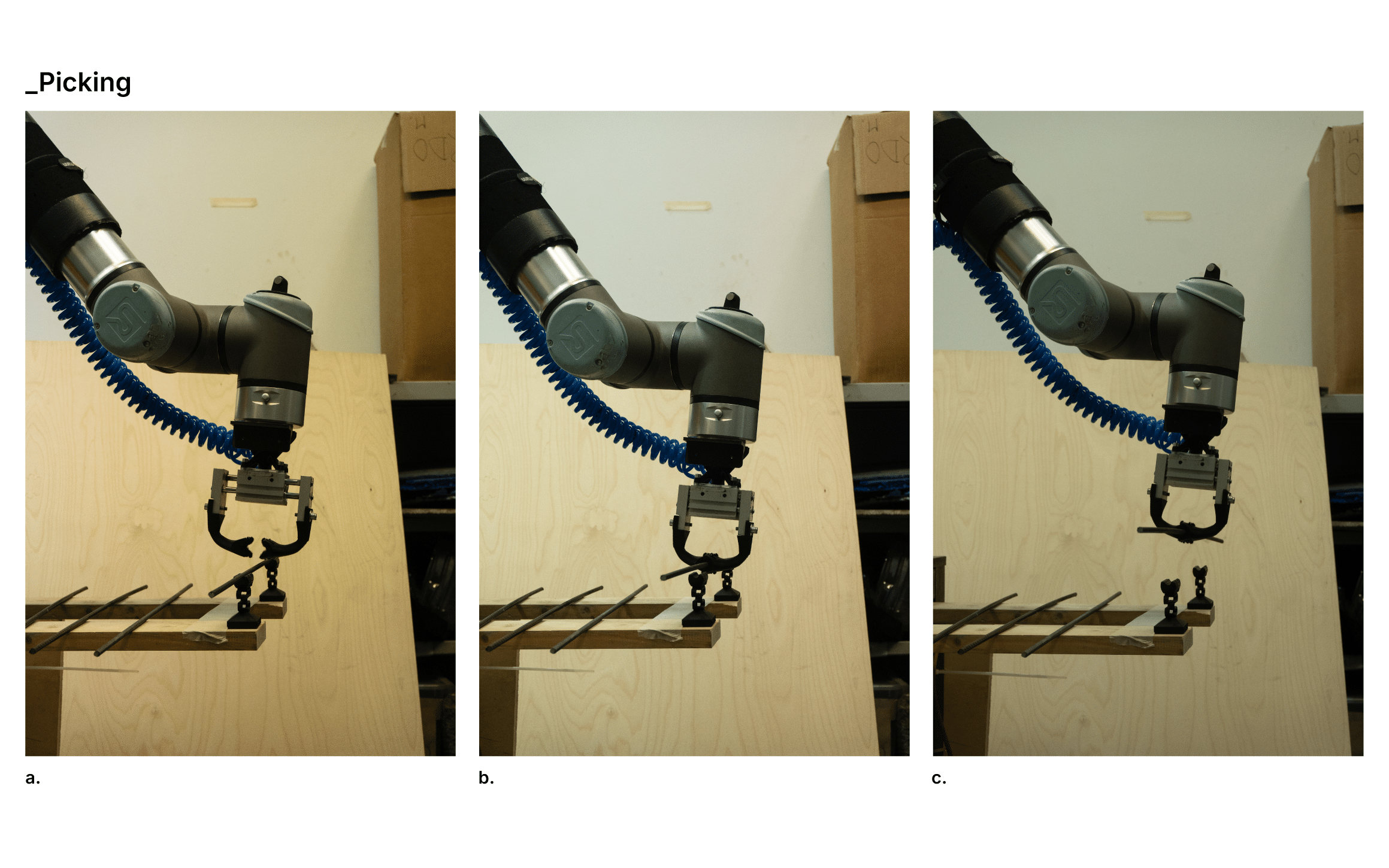
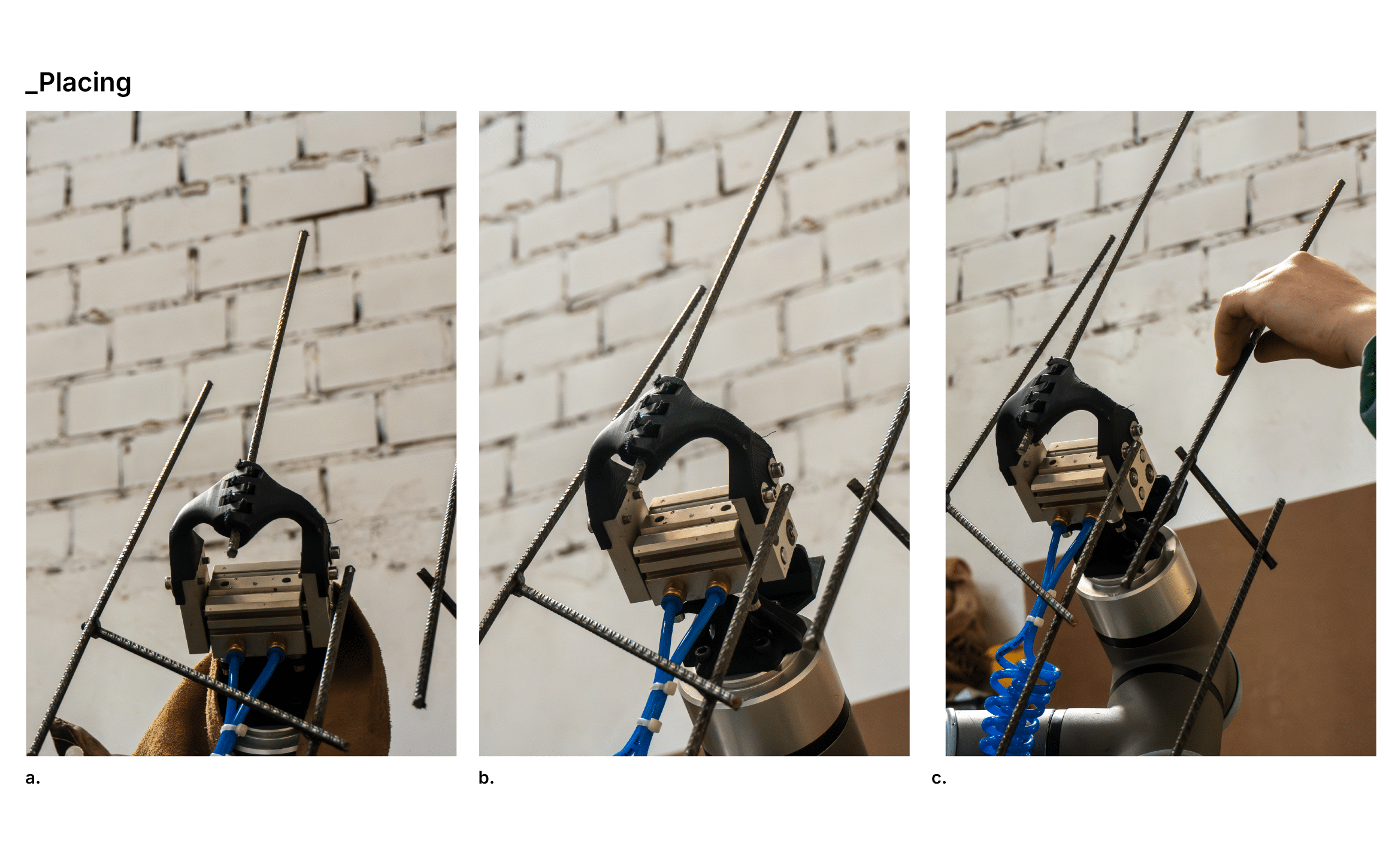
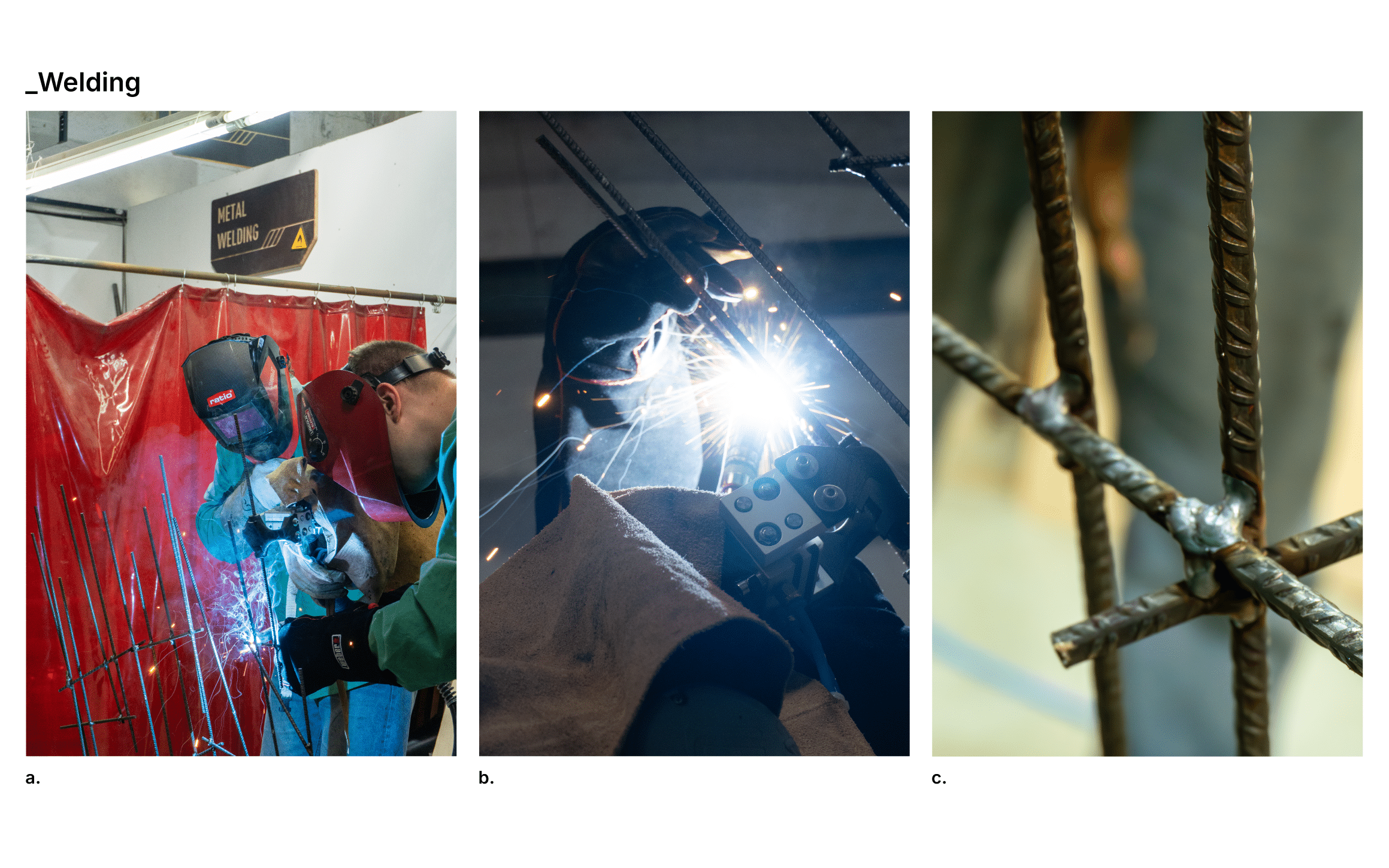
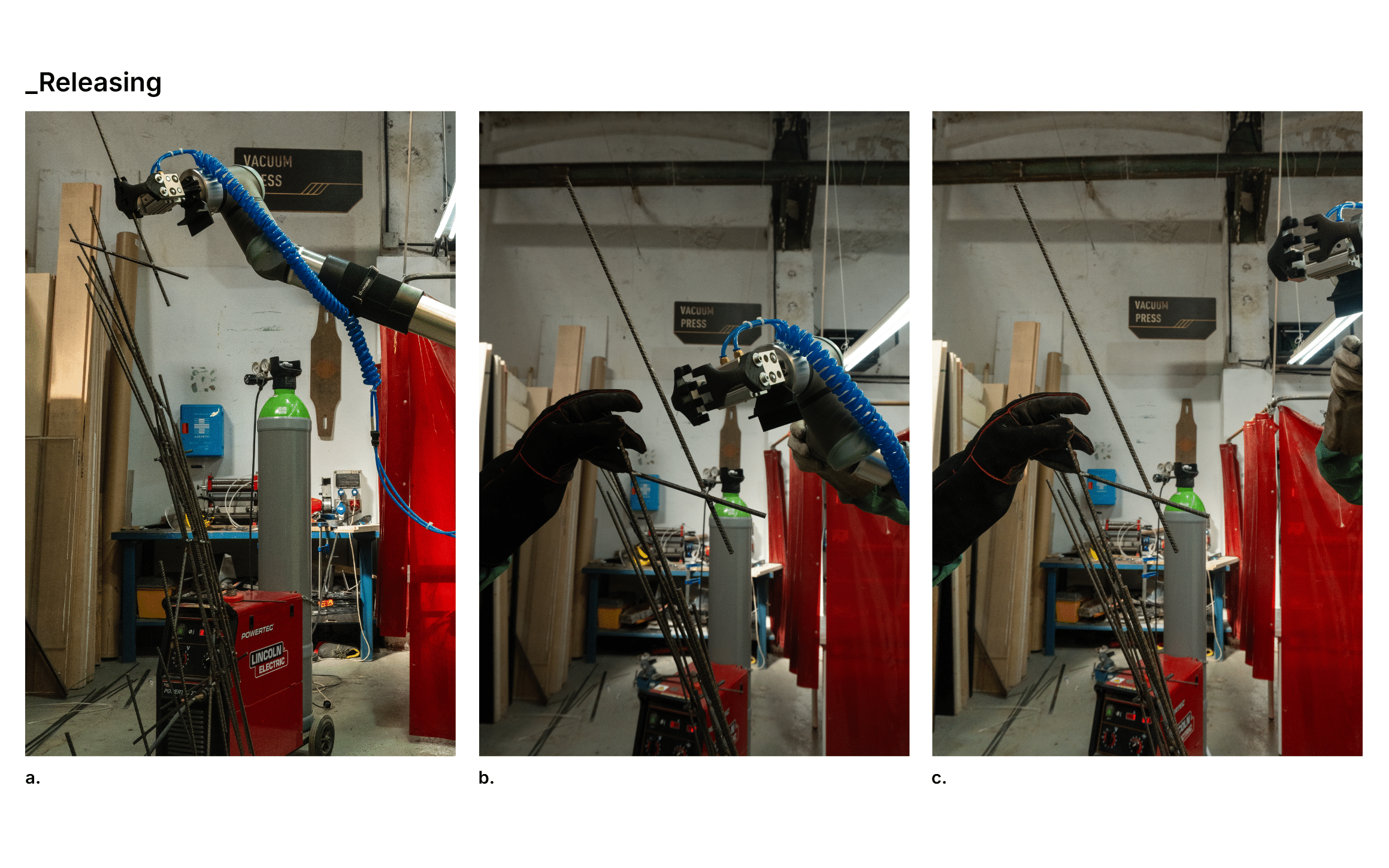
Fabrication Process
Results: Digital vs Physical