
Concept
The intention was to design a multi functional rover with obstacle sensing capabilities.
The rover can be controlled in two ways, either through voice commands or through Bluetooth remote sensing.
Materials

Circuit Diagram
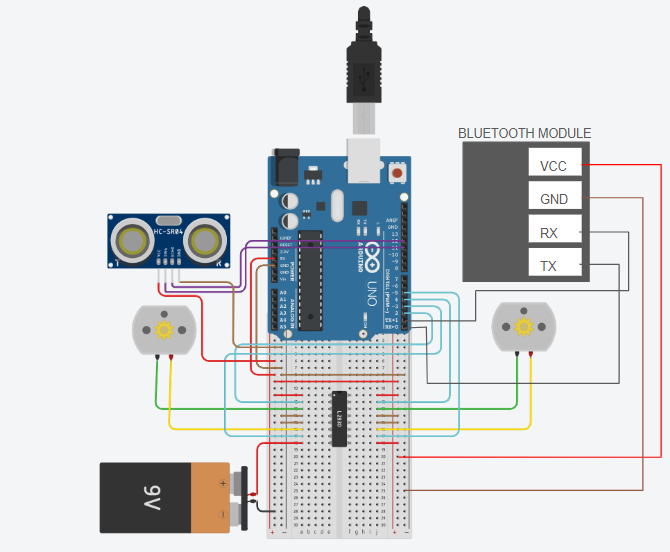
Some critical considerations:
Before uploading the code RX and TX connections must be taken out. After uploading, they must be again reconnected
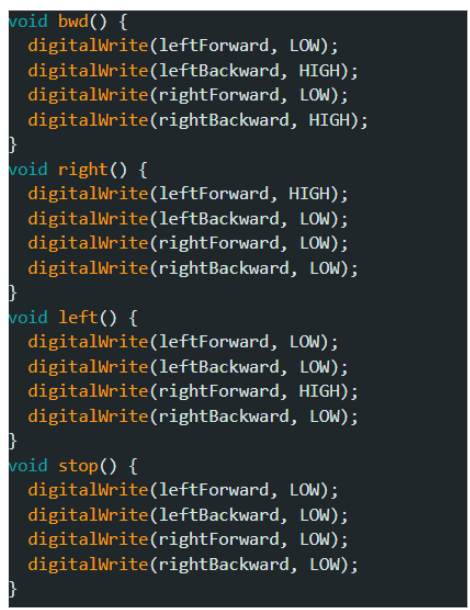
The code

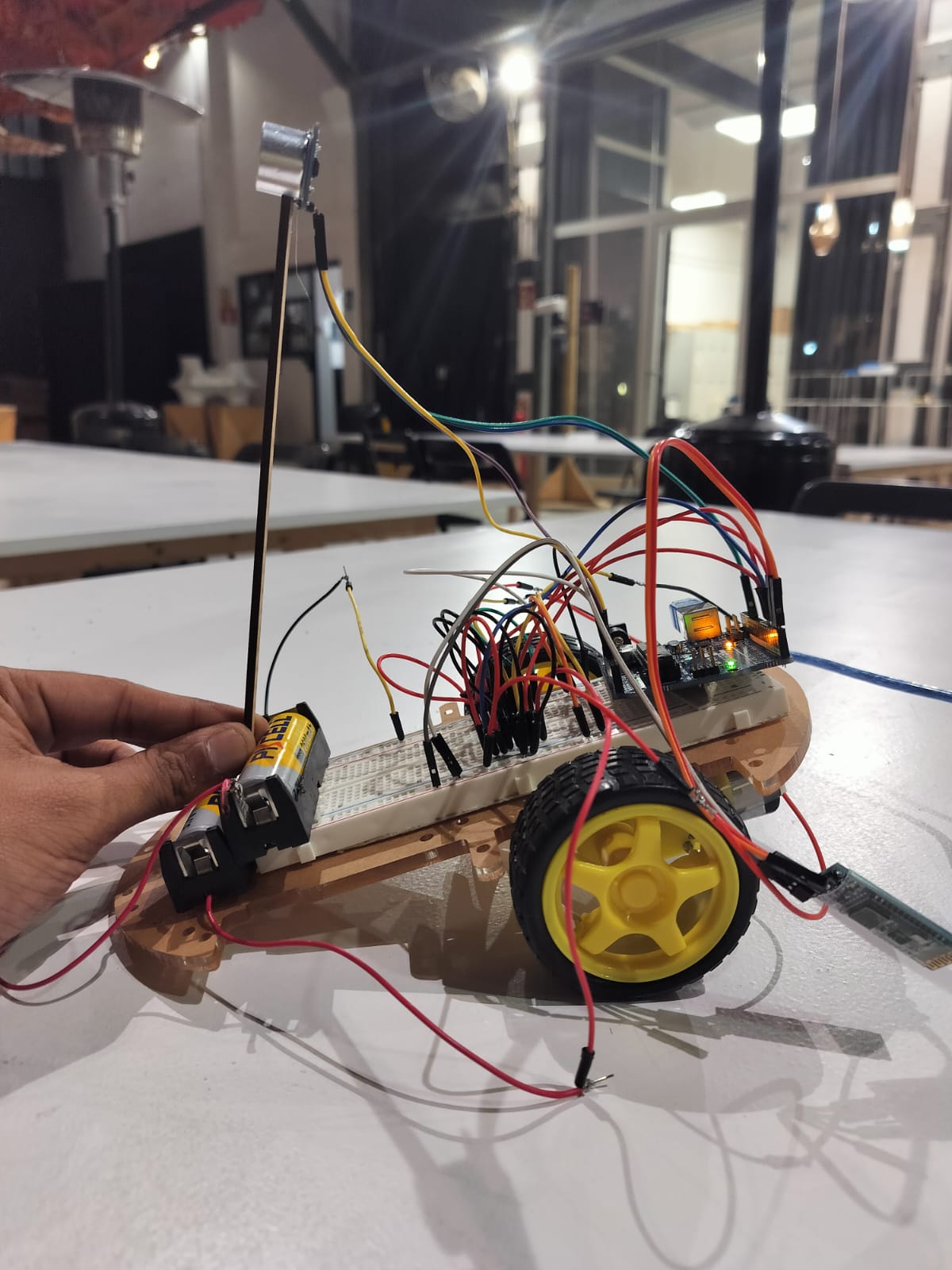
The final prototype
Video
Bluetooth Remote
Voice Control
The way ahead
This project has opened up my mind to explore possible futures in architecture using rover technologies. Maybe a day comes when machines like this merge with synthetic biology can self replicate and help in growth of forms autonomously in every literal sense. But this was the first step to delve into a subject that I was mostly unaware about and as Robert Frost said “ miles to go before I sleep”
