
Aim
“Create a range of robotic mini-games showcasing dexterity and quick reflexes, ideal for casual enjoyment.“
For this one week workshop, we drew inspiration from various games such as infinite passes, penalty shootouts, and boxing, aiming to adapt them for robotic play. Initially leaning towards infinite passes (football), we ultimately found boxing more compatible with the inherent movements of the robots. Consequently, we shifted focus and began crafting the design for the ‘glove’.

“Glove” End-Effector
The ‘glove’ end-effector comprises a 55 cm diameter yoga ball secured with slings and tensioned using zip ties to a wooden flange, which also doubles as an adapter for the ABB 6700 robot.

Control Workflow
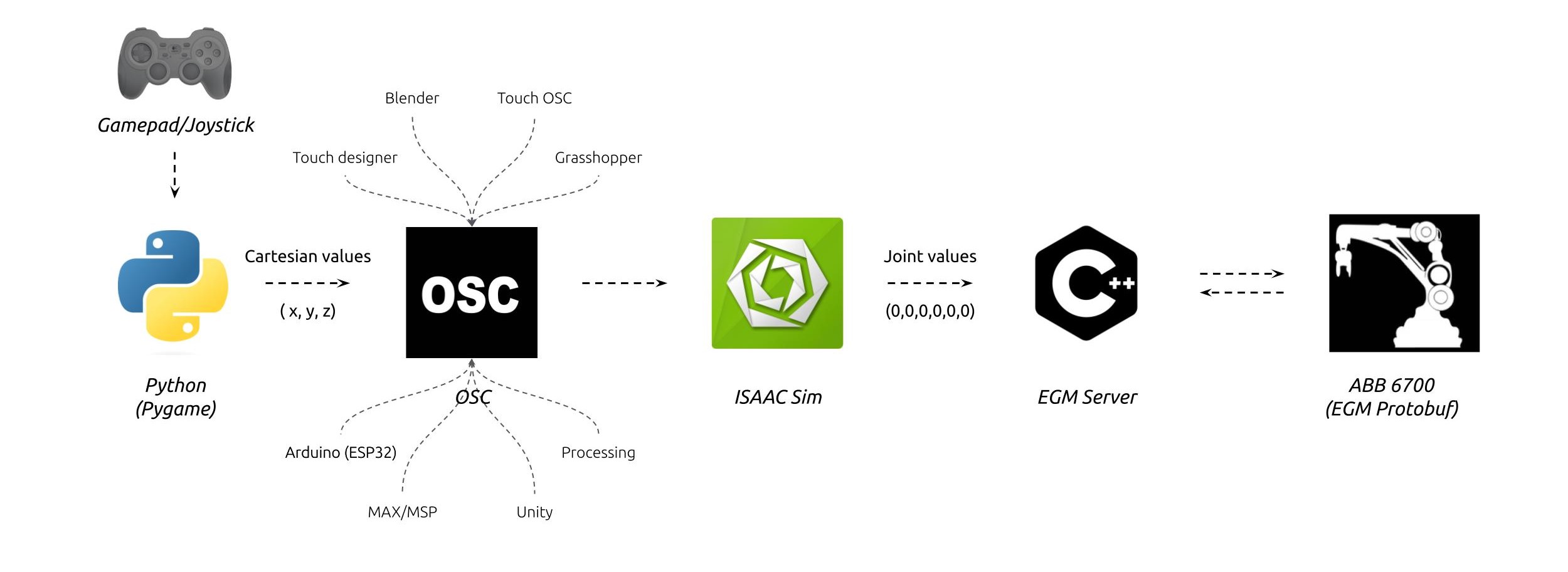
Madelaine Gannon’s workflow introduced the utilization of EGM Server and ISAAC Sim for remote robot control. Additionally, an OSC (Open Sound Control) server equipped with predefined messages was provided, allowing flexibility for tool selection (Blender, Python, Grasshopper) to generate Cartesian poses for the robot. Given this flexibility, we opted to employ a Logitech wireless gamepad to emulate the experience of playing a mini-game on a console. To integrate the controller with the rest of the system, we employed Pygame.
Controller Keys and Interface
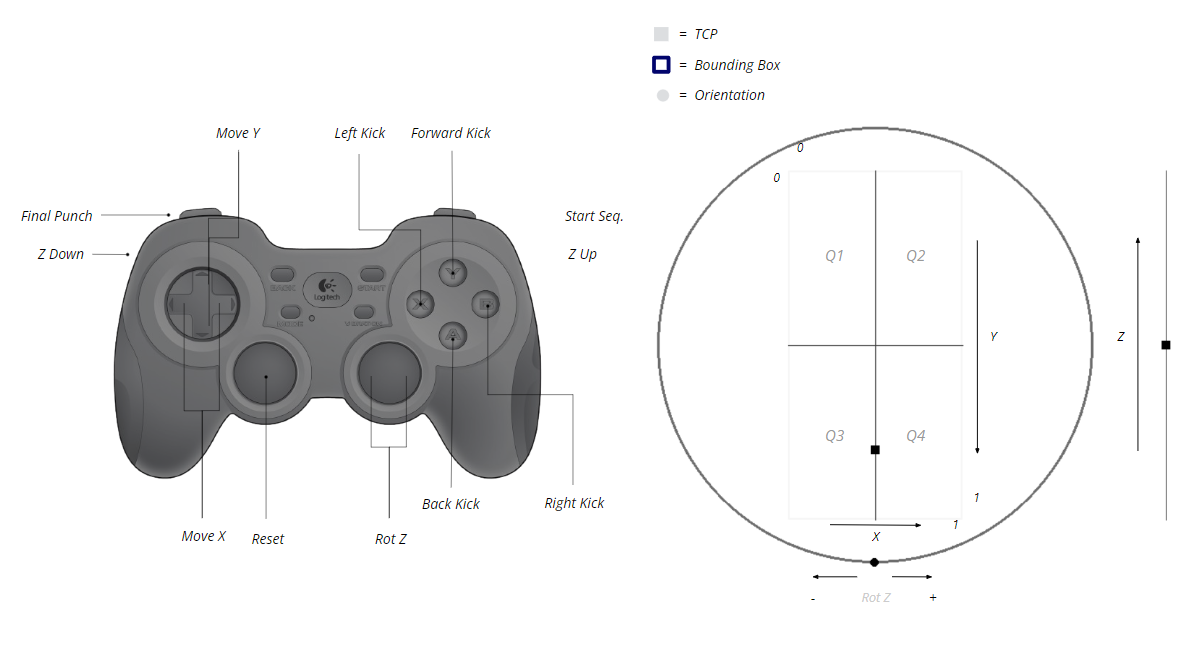
Below, you’ll find the various keys assigned for controlling the robot’s movements. Our aim was to ensure intuitive operation. Additionally, we developed a Python interface to visualize the real-time position and rotation of the robot within its bounding box. However, to streamline the experience and prevent unnecessary movements, we limited player control to the robot’s z-axis rotation for simplicity.
Subsequently, we conducted thorough testing in simulation to ensure user-friendliness and to identify and rectify any bugs.
Conclusions
It’s been an engaging and enlightening learning journey, with the primary objective of crafting results that are both enjoyable and thought-provoking. Despite the methodological constraints, such as bounding boxes, cartesian point movements, and time limitations, delving into Madeline Gannon’s methodology and successfully implementing aspects of it has been immensely fascinating. This experience marked our first successful attempt at facilitating physical (non-harmful) contact between robots and truly captivating the audience’s engagement. It’s an intriguing approach to humanizing or altering humans’ perspectives on robots.
Github repository: https://github.com/ainhoaarnaiz/personable_robotics
