Abstract
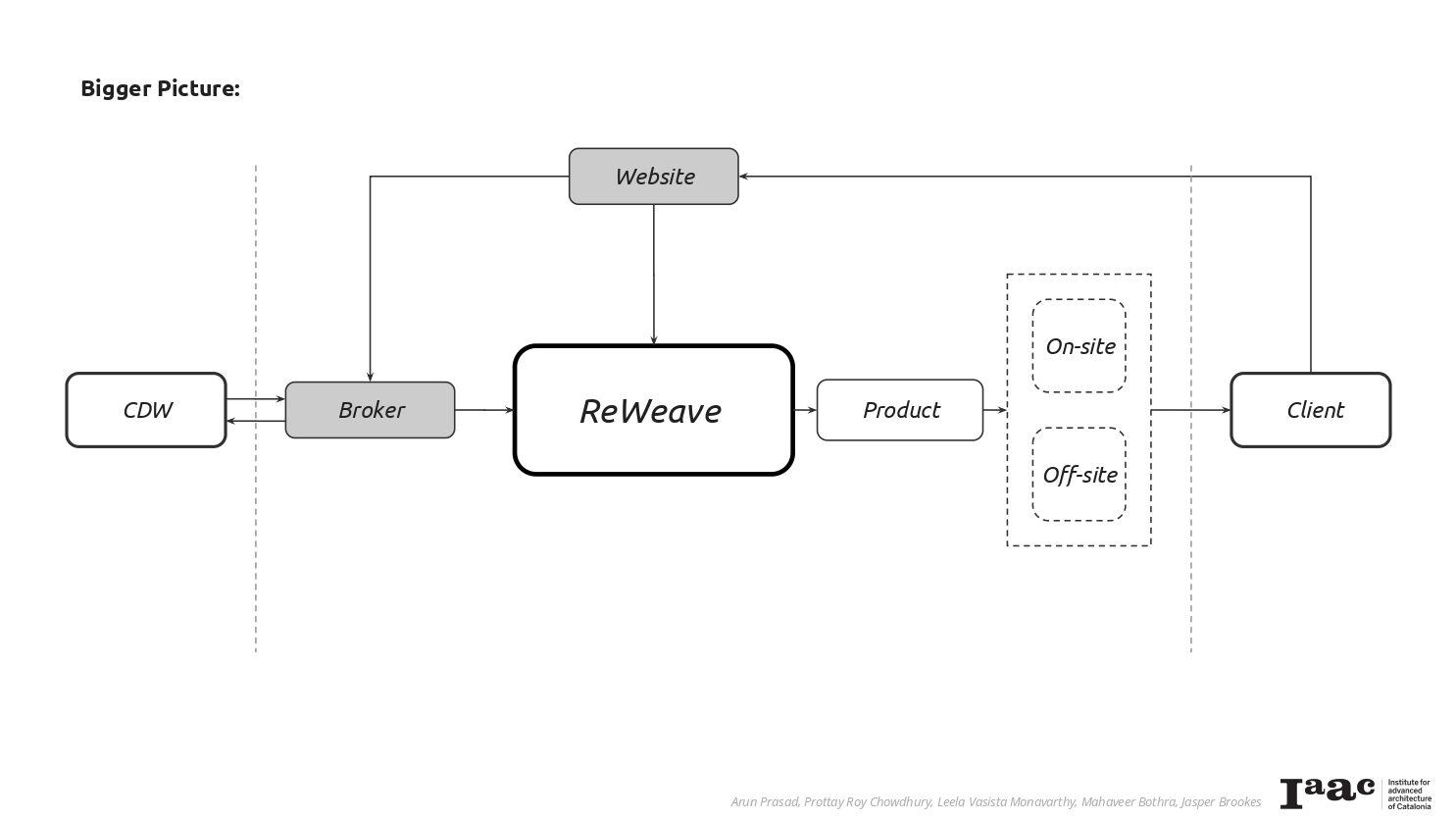
The escalating challenge of managing construction and demolition waste necessitates innovative approaches to enhance sustainability in the construction industry. This research proposes an automated robotic workflow leveraging Multi Agent Systems (MAS) and computer vision to repurpose planar construction waste materials, such as tiles, into new construction elements like bricks or walls. The primary objective is to develop a system that not only promotes the reuse of materials but also ensures the creation of aesthetically appealing surfaces.
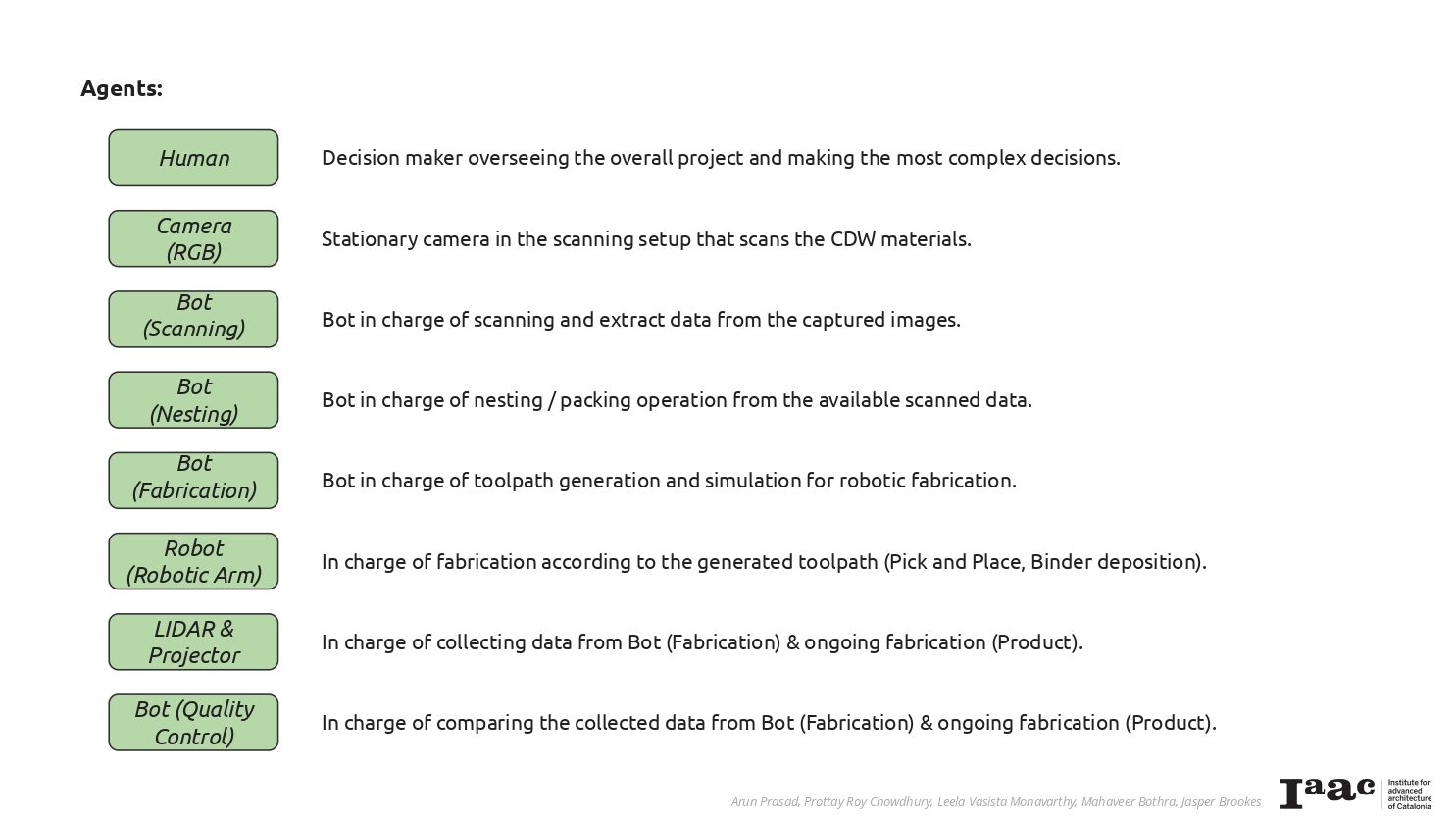
Our proposed system operates within a non-deterministic, closed, continuous, and accessible environment. The non-deterministic nature arises from the inherent randomness in the shapes and characteristics of the waste materials. The system remains closed, with no additional agents introduced beyond those initially incorporated. It is continuous and accessible during the scanning stage, where robots map the area to identify and classify the waste materials.
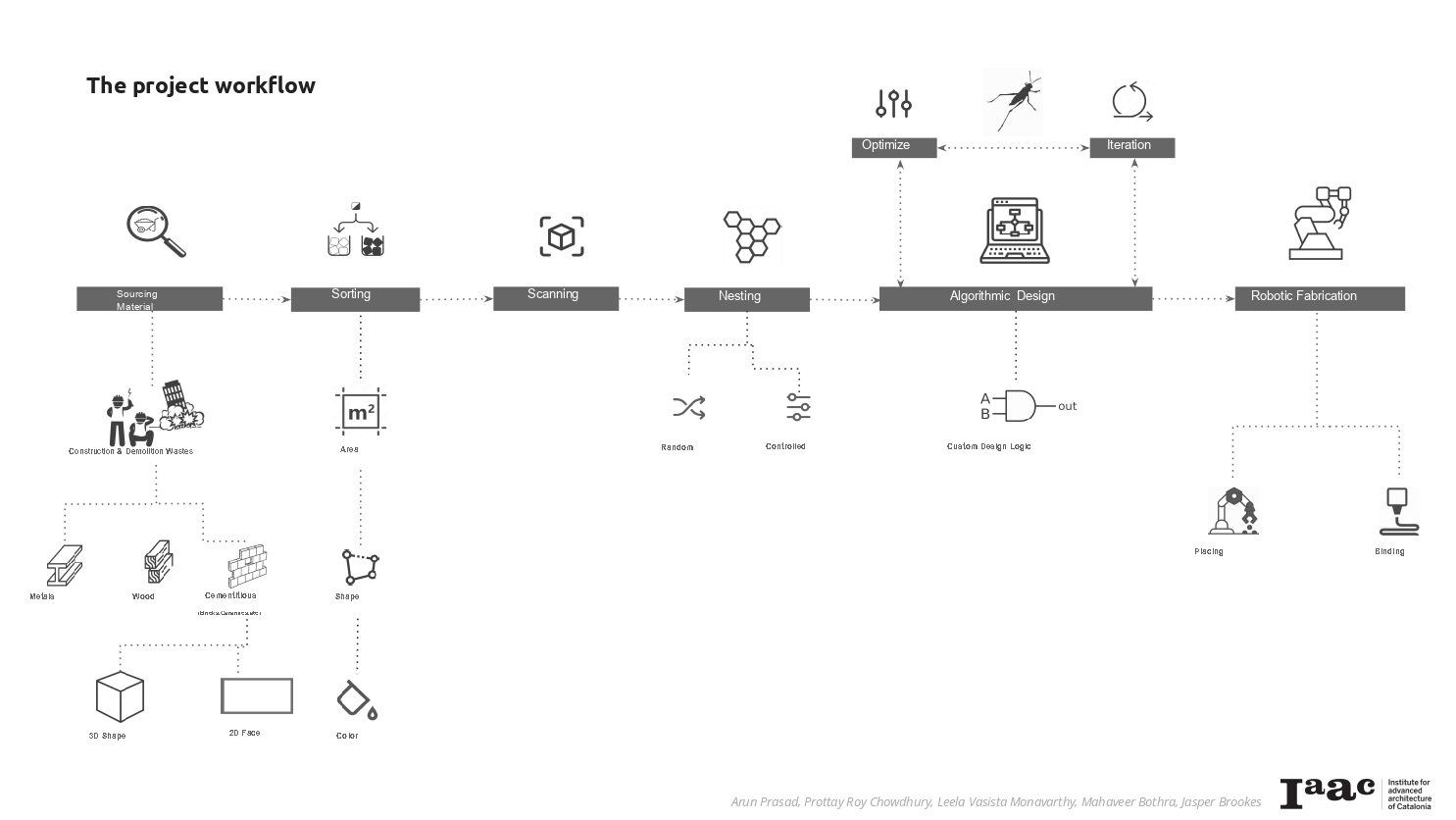
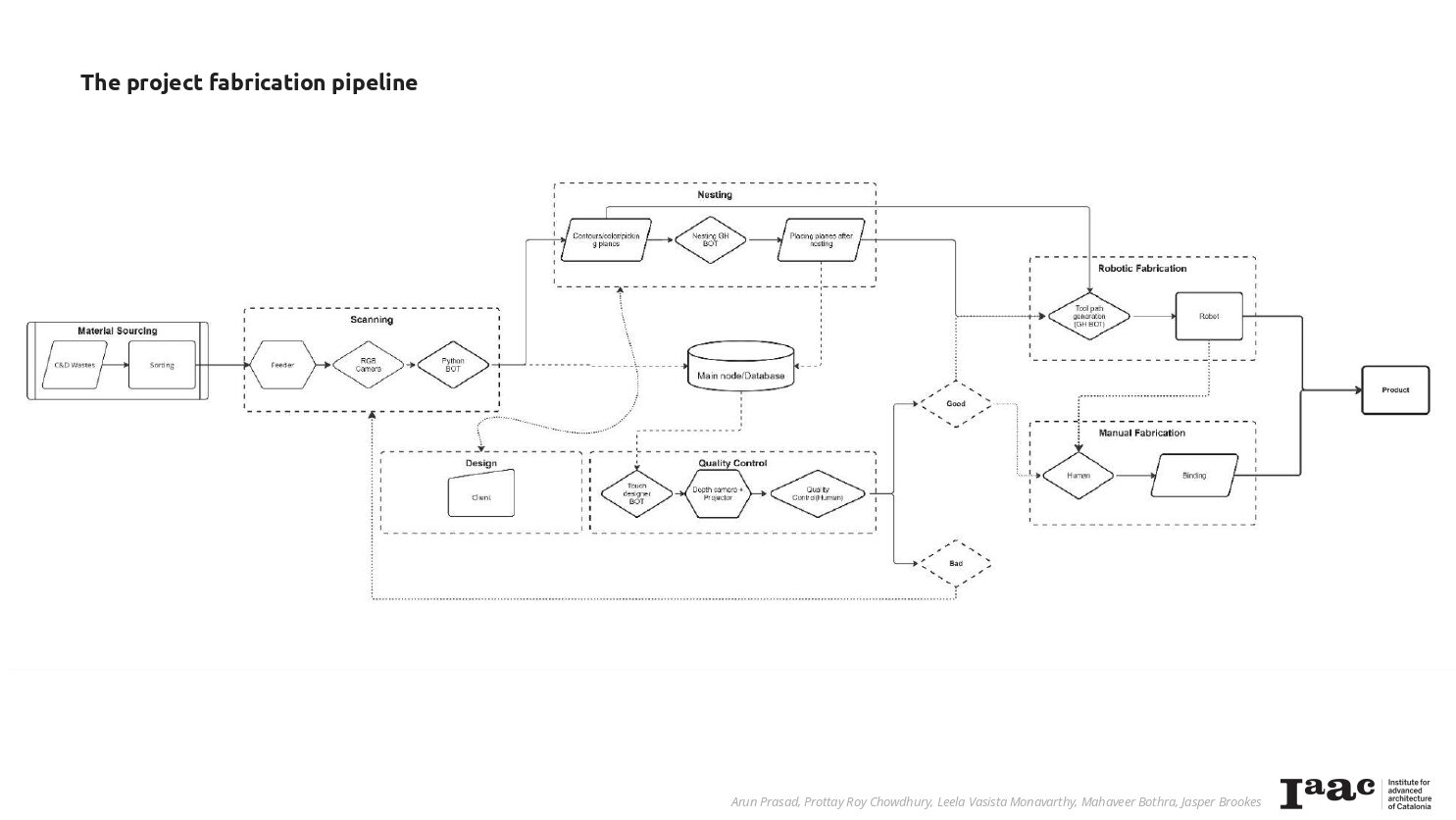
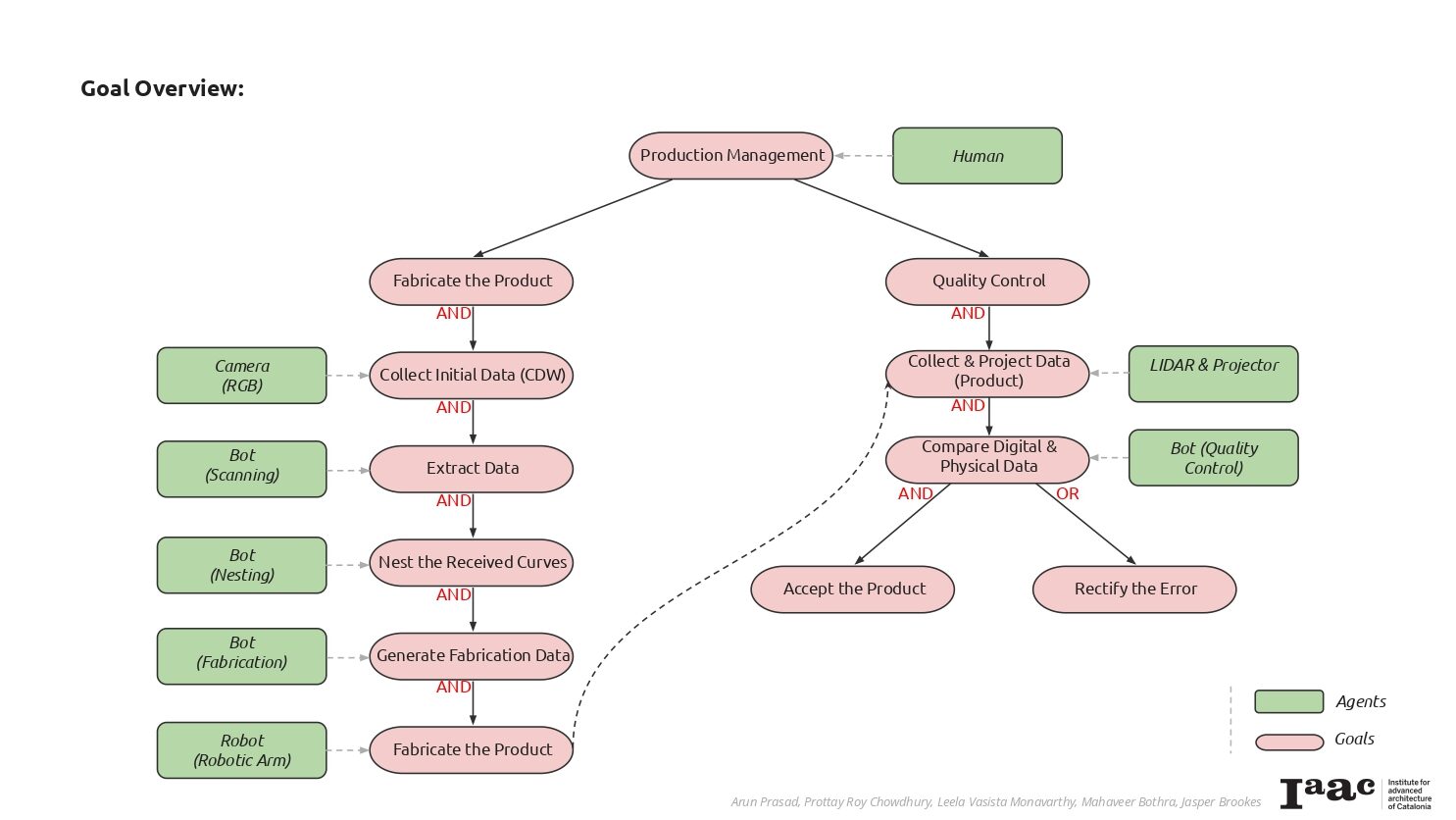
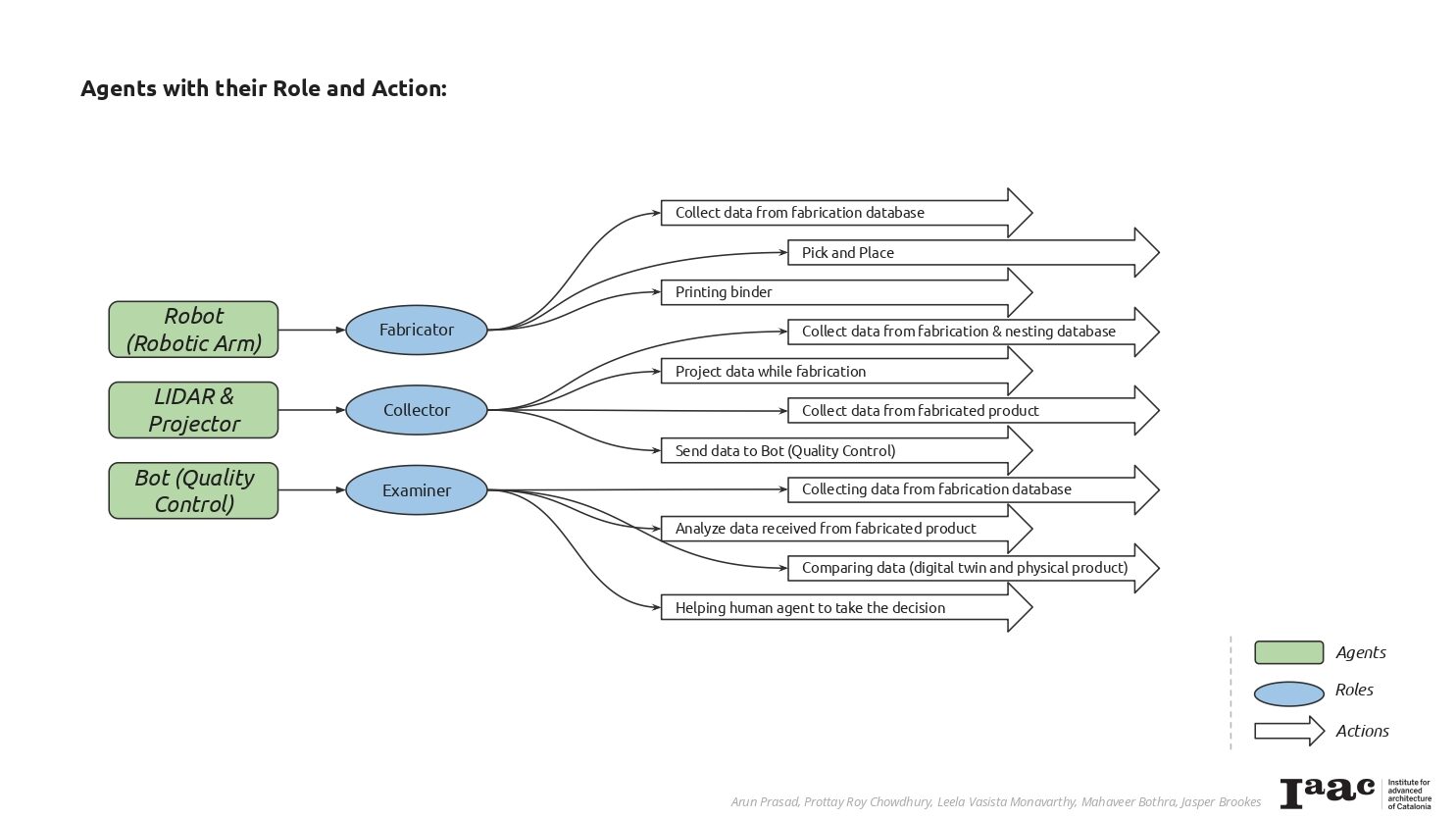
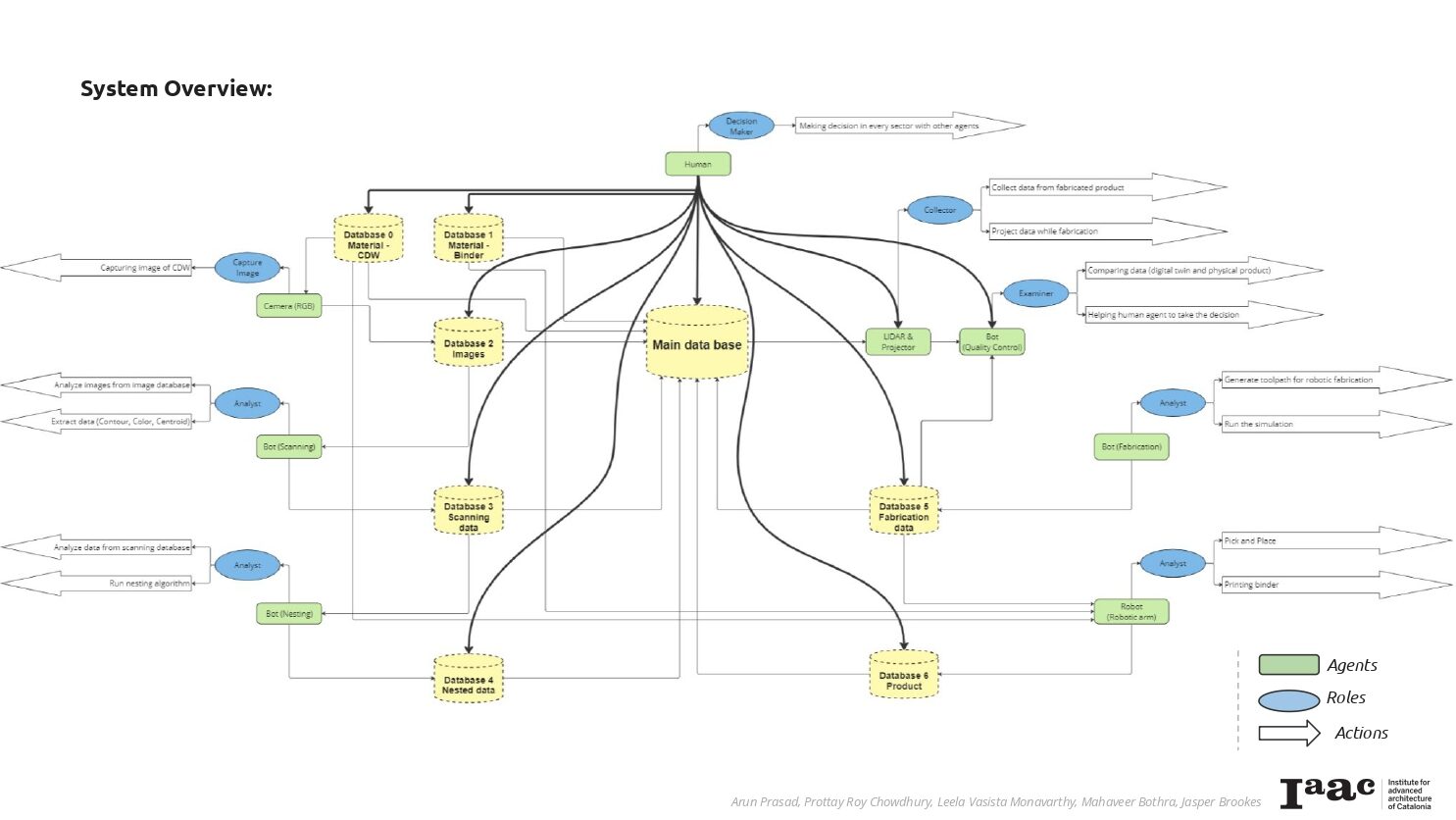
The process begins with robotic agents equipped with advanced computer vision algorithms to scan and analyze the construction waste. These agents generate detailed maps and data on the materials’ dimensions and characteristics. Subsequently, a custom algorithm processes this data to determine optimal packing strategies, converting irregular waste pieces into uniformly shaped bricks or aesthetically pleasing wall sections.
By automating the scanning, mapping, and repurposing stages, this MAS framework aims to enhance efficiency, reduce waste, and contribute to sustainable construction practices. The system’s ability to adapt to the unpredictability of waste material shapes while operating within a controlled environment underscores its robustness and potential for widespread application in the construction industry.
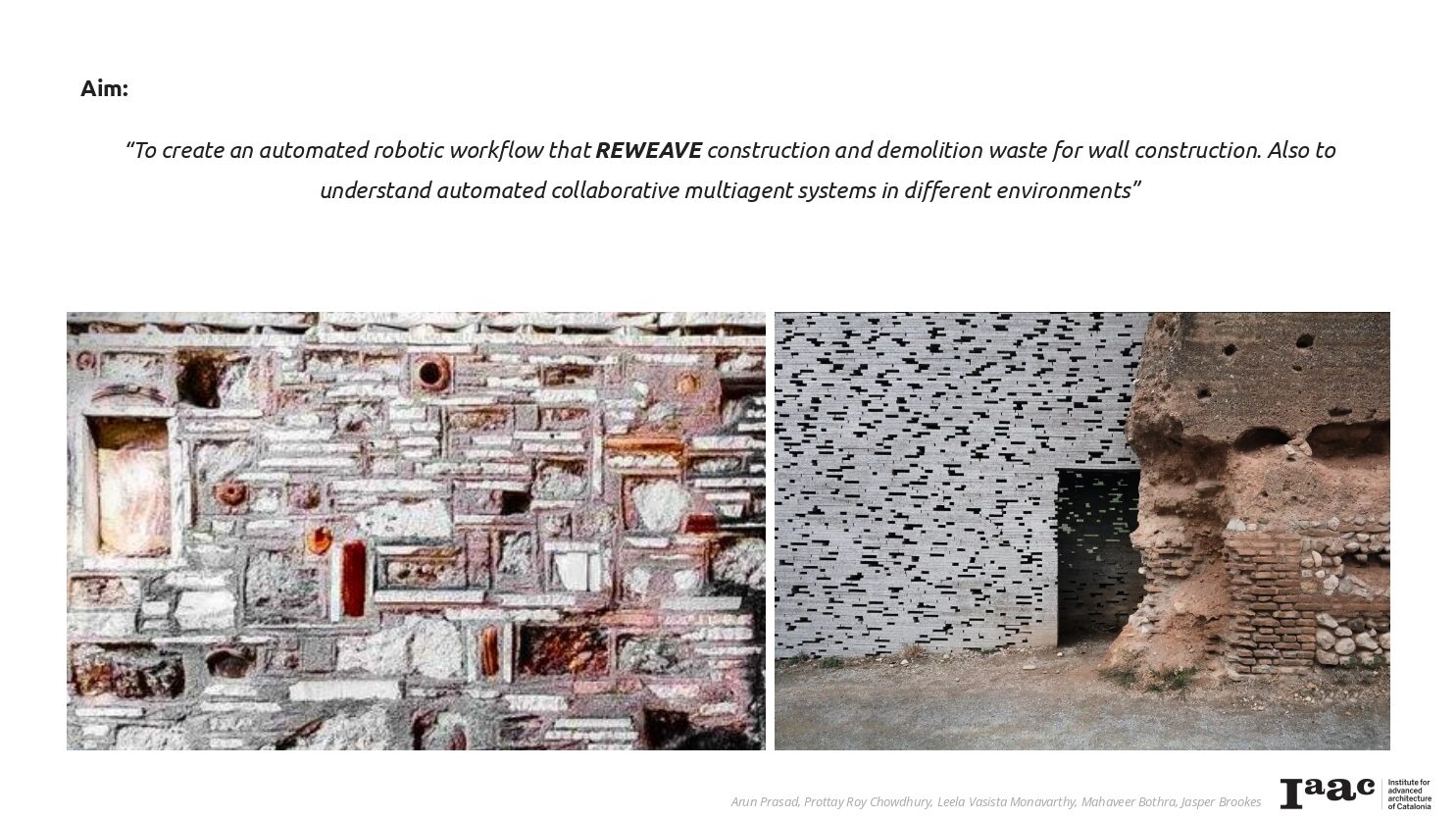
Image Credits :- Mosaic art by designer Pikinois & Moorish Wall in Alto Albaicín / Antonio Jiménez Torrecillas