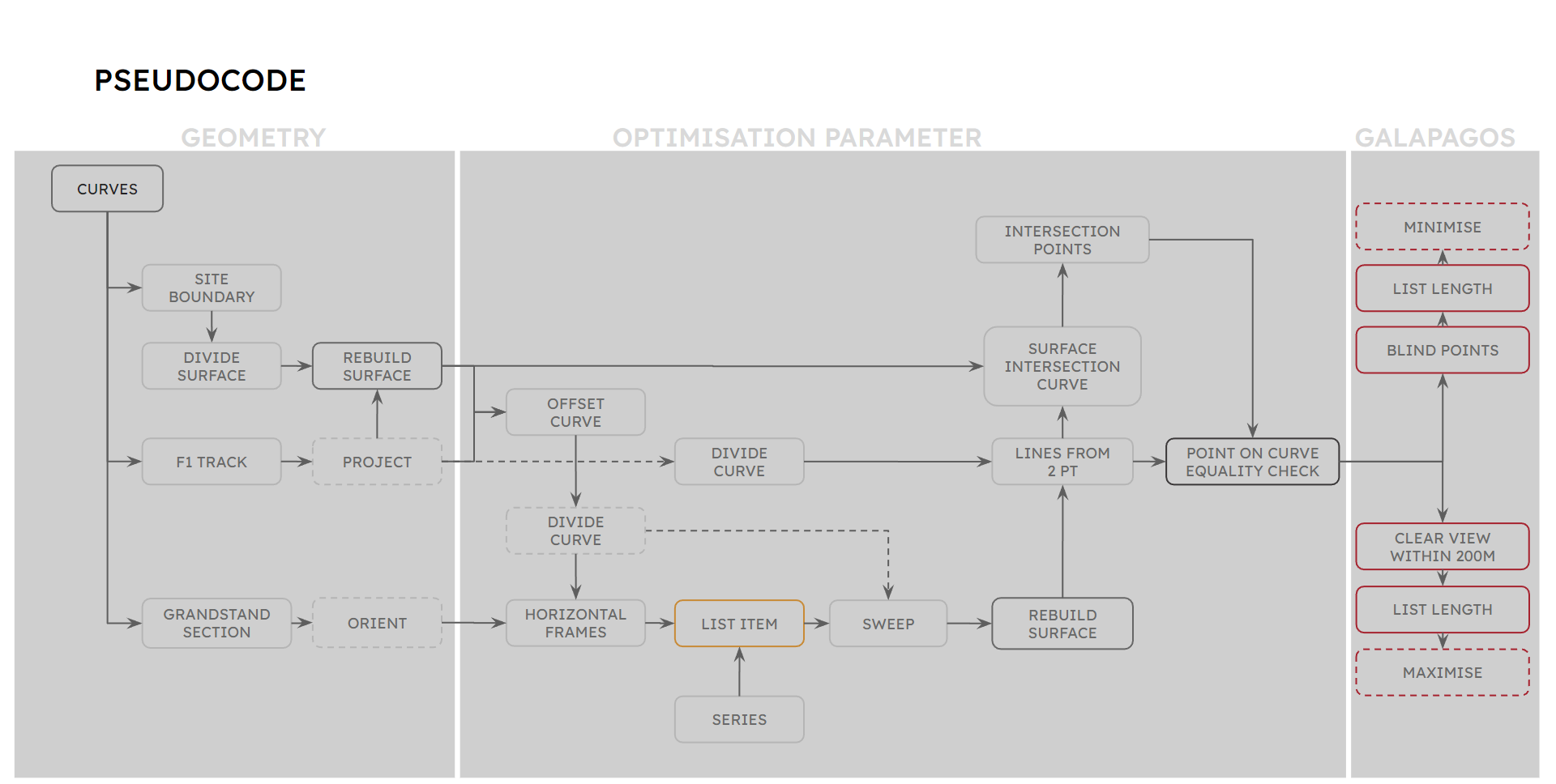
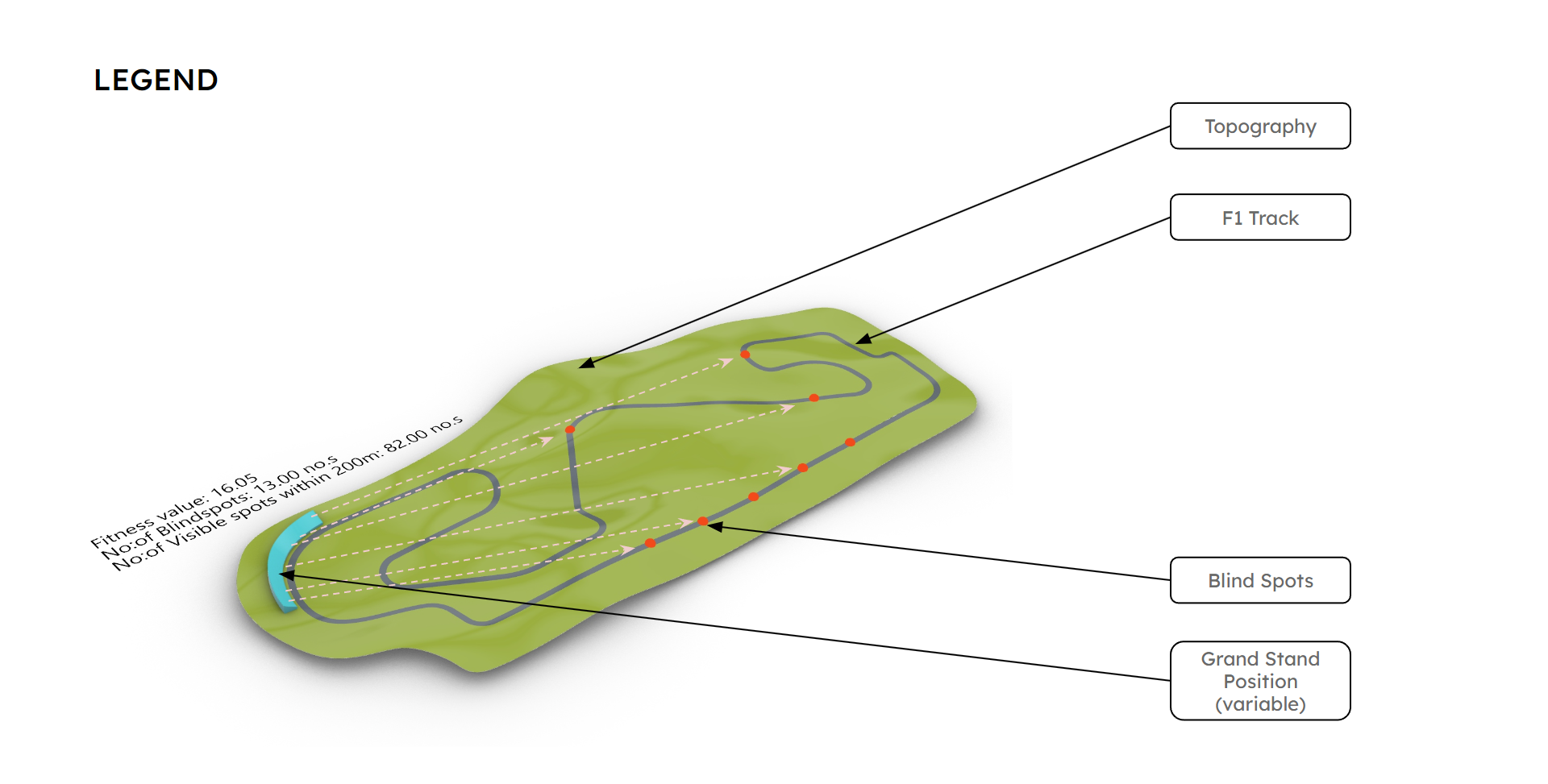
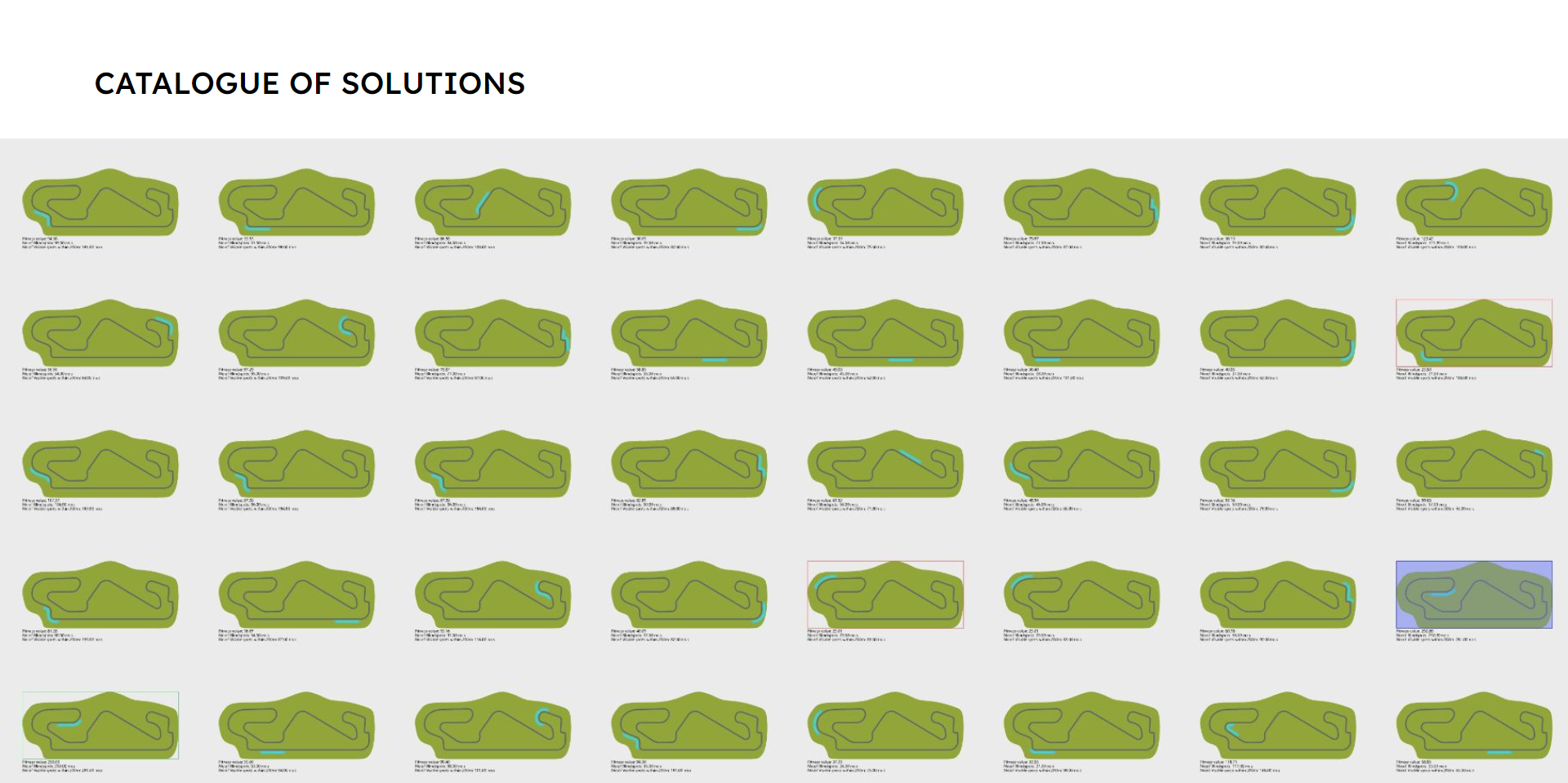
This optimization uses computational design to achieve the best placement of the Grand-Stand around a predefined F1 racetrack and topology for maximum visibility for spectators using Grasshopper and Galapagos Evolutionary solver.



This optimization uses computational design to achieve the best placement of the Grand-Stand around a predefined F1 racetrack and topology for maximum visibility for spectators using Grasshopper and Galapagos Evolutionary solver.
