In the second exercise of Anatomy of a Machine, our goal was to understand how a robot expresses itself through material behavior. Instead of carving or shaping solids, we explored how liquid material behaves when actuated, accelerated, and released through a controlled spraying mechanism. “Spill” became a study of force, viscosity, height, angle, and timing and how these parameters become a visual language when translated into a robotic toolpath.

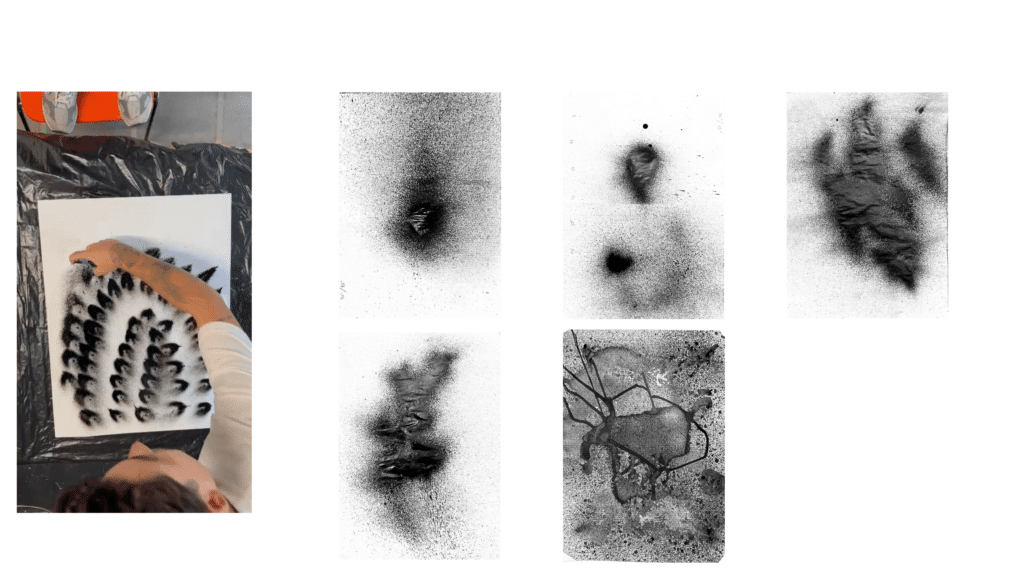
Manual Spray Experiments — Understanding the Primitive Behavior
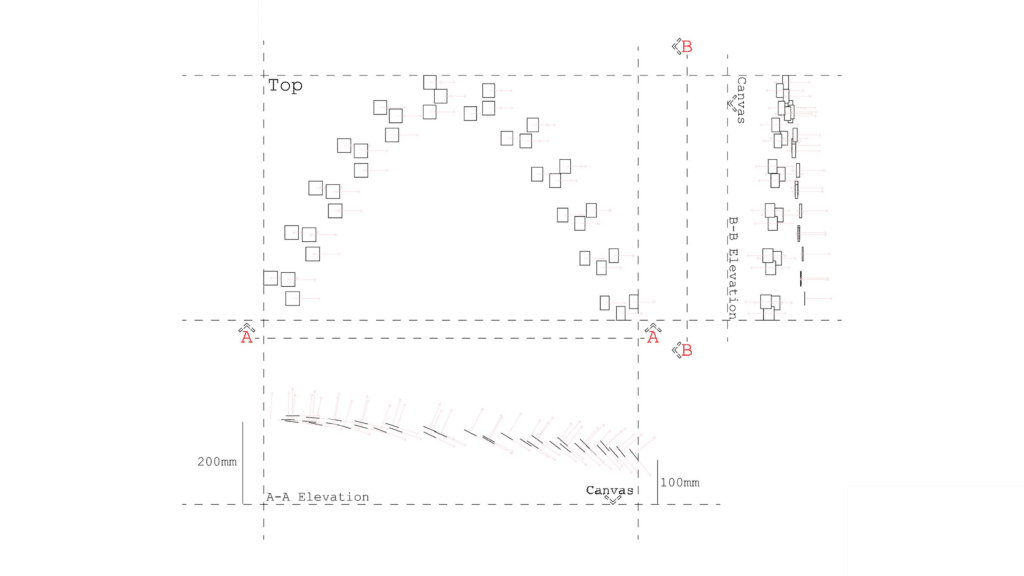
Before designing any robotic actuation, we experimented by hand to understand the raw physical logic of the spray medium.
We tested:
- Nozzle distance
- Spray angle
- Trigger pressure intensity
- Continuous vs pulse spraying
- Speed of motion
- Droplet density and spread radius
These tests helped us observe how small variations produce drastically different outcomes. This manual exploration built our “material intuition,” which later informed how the robot should move and how the end-effector should be actuated.

Motor Selection – Understanding the Force Required to Trigger the Spray Mechanism
Our first task was to quantify the exact force required to activate the spray bottle’s trigger. Through repeated measurements, we mapped three critical force thresholds:
- Initial movement: 800 gf → 7.85 N
- Half stroke: 900 gf → 8.83 N
- Full activation (spray engaged): 1200 gf → 11.77 N
This meant that any actuation system below 12 N could not fully open the spray valve. With this requirement established, we systematically tested three possible actuator types:
1. Solenoid Plunger (≈5 N)
Our first attempt used a simple solenoid plunger. Although easy to control via Arduino (digital ON/OFF), its maximum 5 N output was far below the required 11.77 N, and its short stroke length created a very steep force decay. As a result, the solenoid was physically unable to push the trigger into the spray activation range.
Outcome: Rejected / insufficient force and limited stroke.
2. Pneumatic Cylinder (≈120 N at 6 bar)
Next, we tested a pneumatic cylinder, which produced more than enough force to activate the spray reliably. Mechanically, it performed very well fast, powerful, and consistent.
However, this option introduced two major issues:
- It required an external valve system, air supply, and additional drivers.
- It could not be integrated into Arduino control within our setup, making timing and spray modulation impossible.
Outcome: Rejected / mechanically strong but incompatible with Arduino-based control.
3. Linear Electric Actuator (150 N)
Finally, we tested an electric linear actuator capable of delivering 150 N, far exceeding the required minimum activation force.
Advantages:
- Fully controllable via Arduino PWM or digital pin
- Smooth and precise motion
- Reliable stroke length
- Sufficient force for all trigger positions
This configuration provided complete control over spray timing, duration, and intensity, making it the optimal actuation system for our robotic end-effector.
Outcome: Selected meets force requirement and supports full Arduino integration.

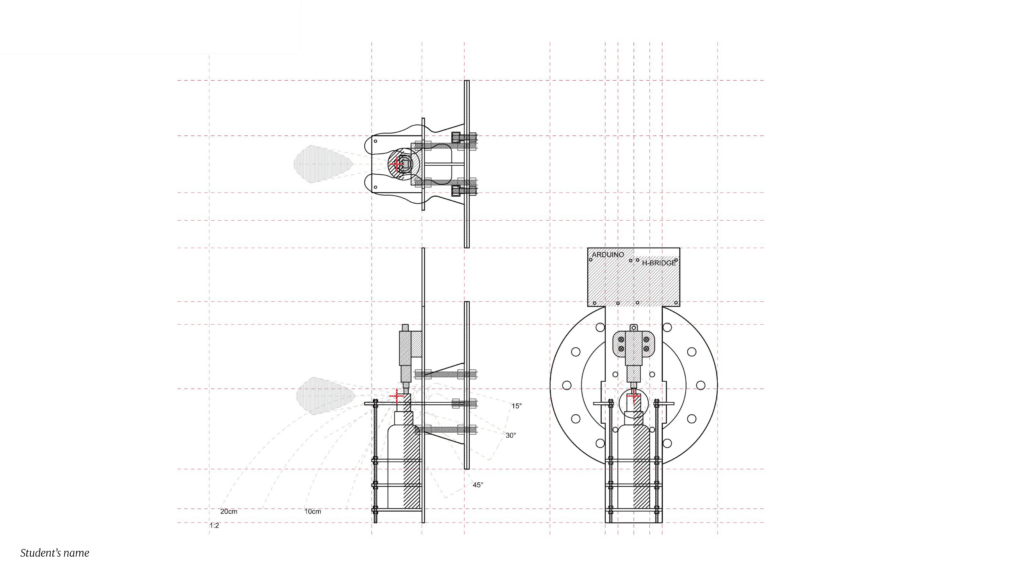
2. Designing the Custom End-Effector
To translate human spraying logic into robotic performance, we developed a custom end-effector consisting of:
- Linear actuator for trigger pressing
- H-Bridge motor driver for directional and speed control
- Arduino microcontroller for PWM signal generation
- Mounting bracket designed for ABB IRB robots
- Stabilized nozzle holder to guarantee consistent spray angle
Using principles covered in Hardware I lectures on actuators, drivers, and motor control, we mapped the physical requirements (force, speed, travel distance) to the proper electronic components.
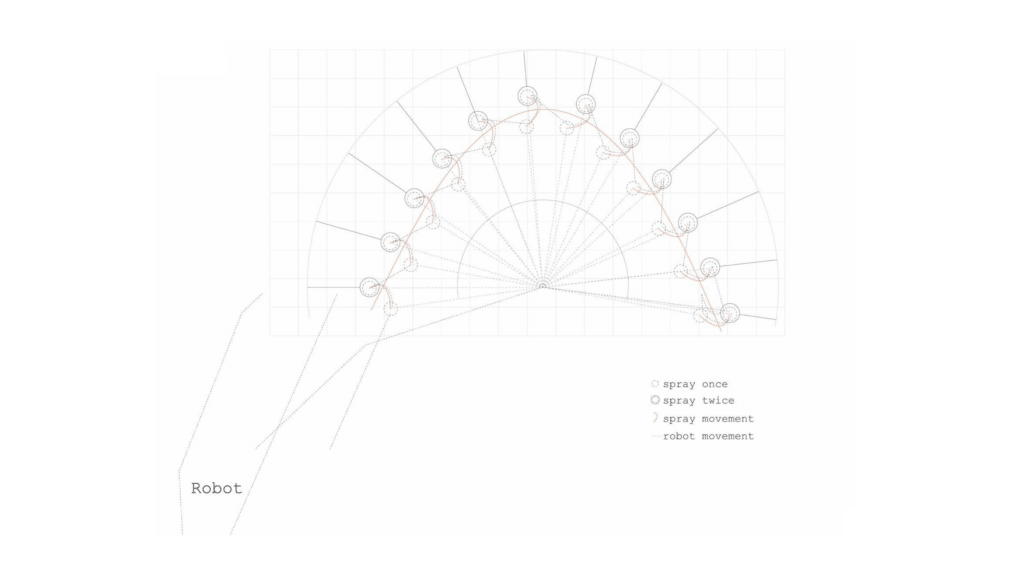
What we calculated / tested:
- Required actuator stroke to mimic a full trigger press
- Minimum force to activate spray
- PWM values required for smooth analog-like behavior
- Delay curves for burst, pulse, and continuous spray modes
- Proper cable management for safe robot motion

Through SPILL, we learned:
- Material behavior is part of robotic design, not a side-effect.
- Electronics and mechanics directly shape visual output.
- IO communication transforms a robot from a positioning machine into a painter.
- Spray patterns can be controlled parametrically (pressure, timing, speed, distance).
- Understanding the analogue domain is essential before digitalizing it.
SPILL became a bridge between human intuition and robotic precision, allowing us to choreograph matter in motion.
Conclusion
This exercise expanded our understanding of how robots can manipulate not only solids (like in the first assignment) but also fluids, revealing a new aesthetic and mechanical territory. By designing the end-effector, constructing an actuator system, and developing digitally choreographed spray behaviors, we transformed the robot into a dynamic painting instrument one whose gestures are defined by both engineering logic and material sensitivity.