Robotic Disassembly & Reassembly with Spatial AI
Abstract
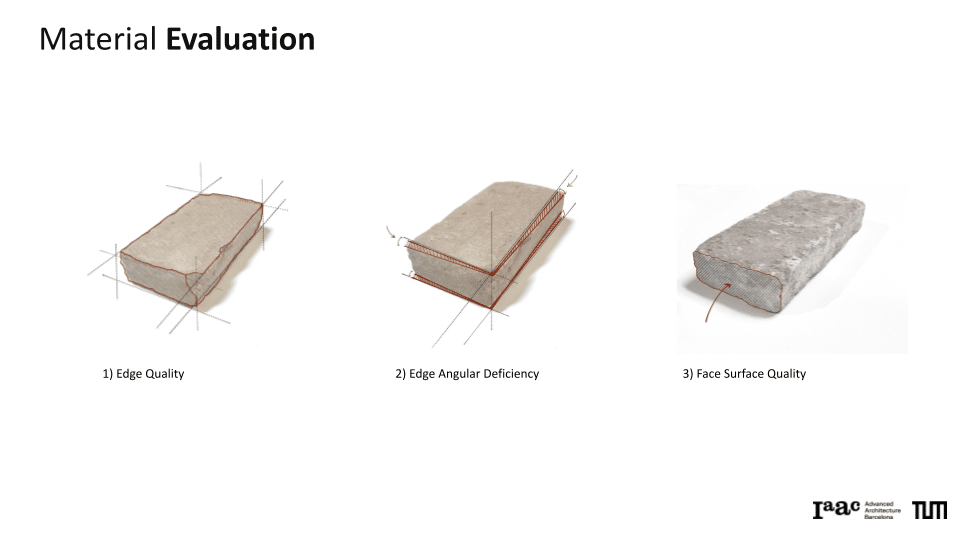
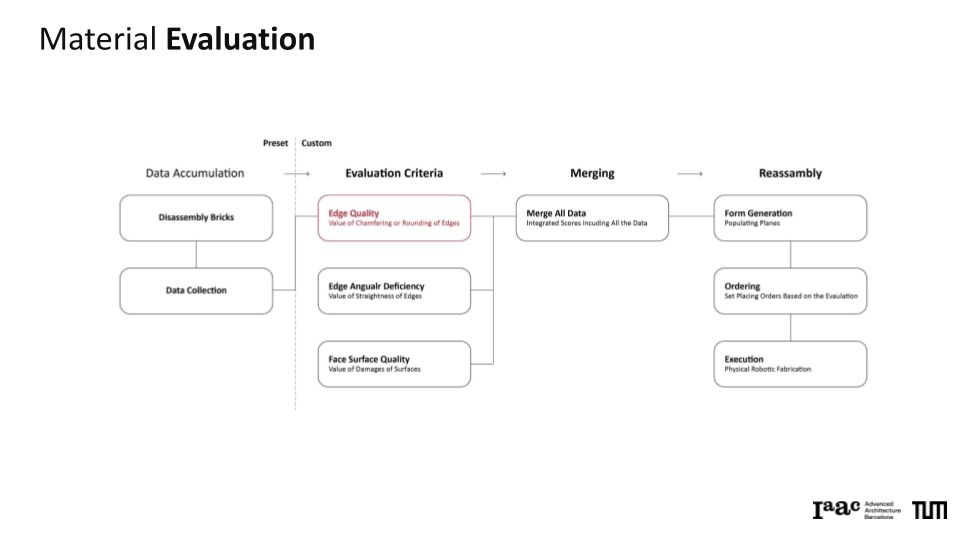
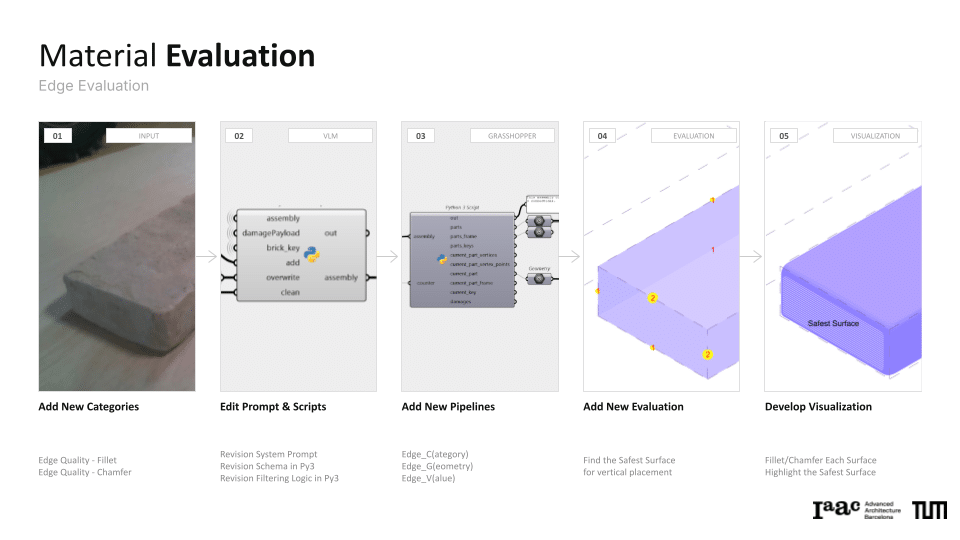
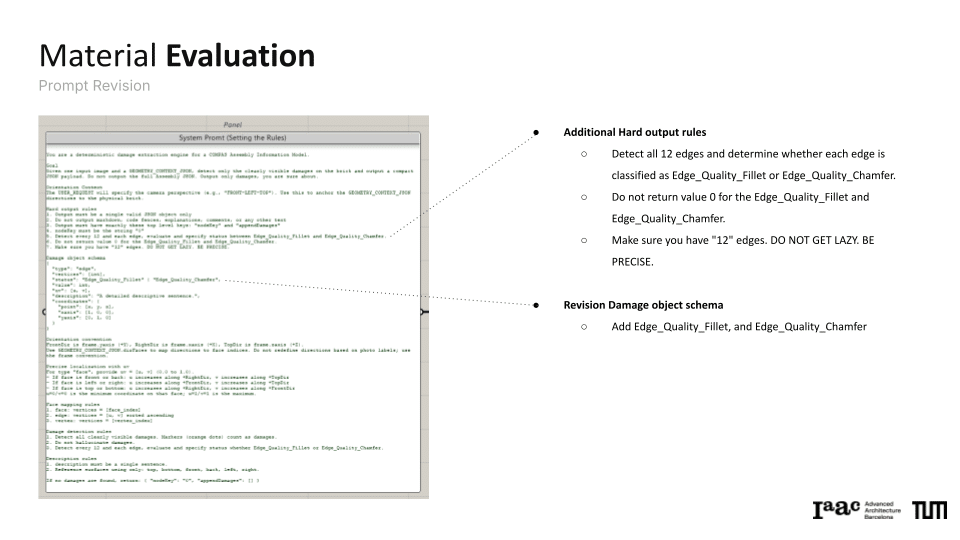
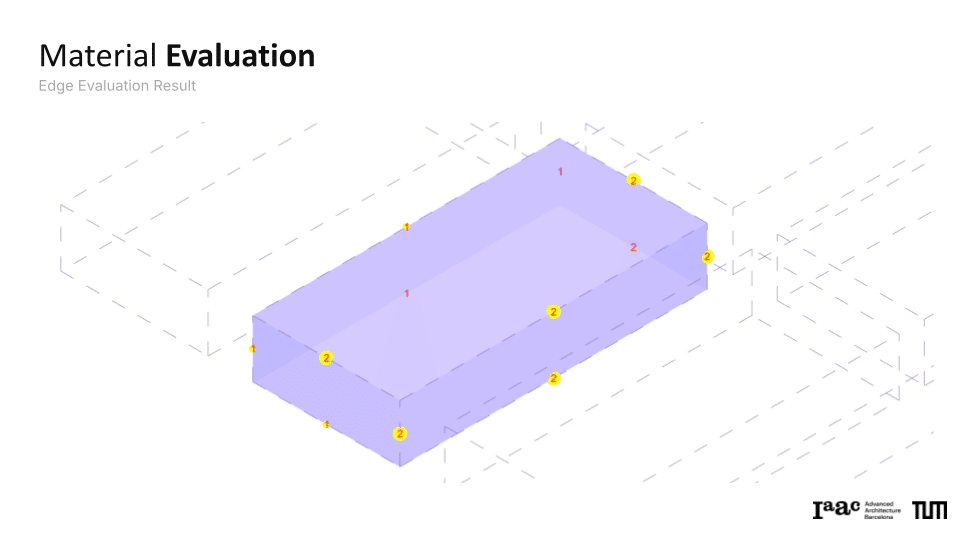
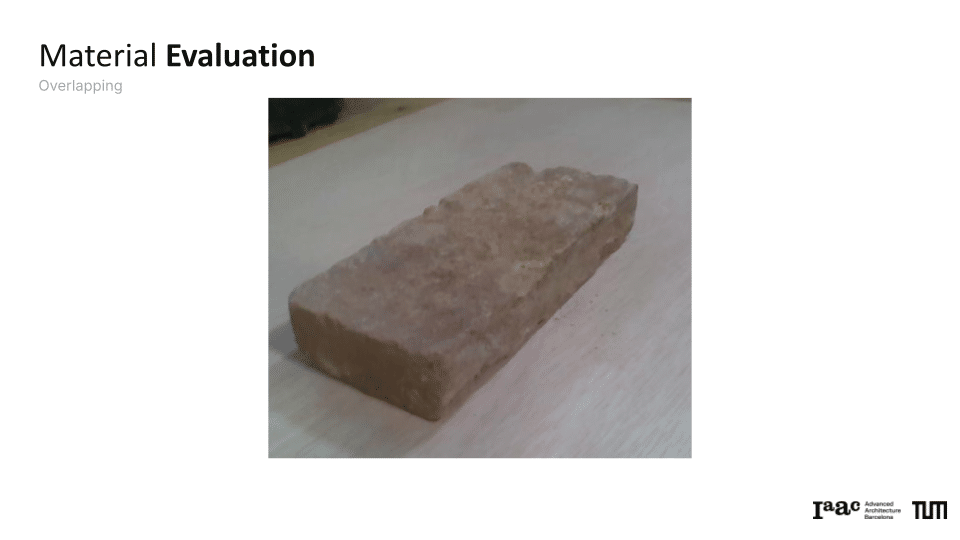
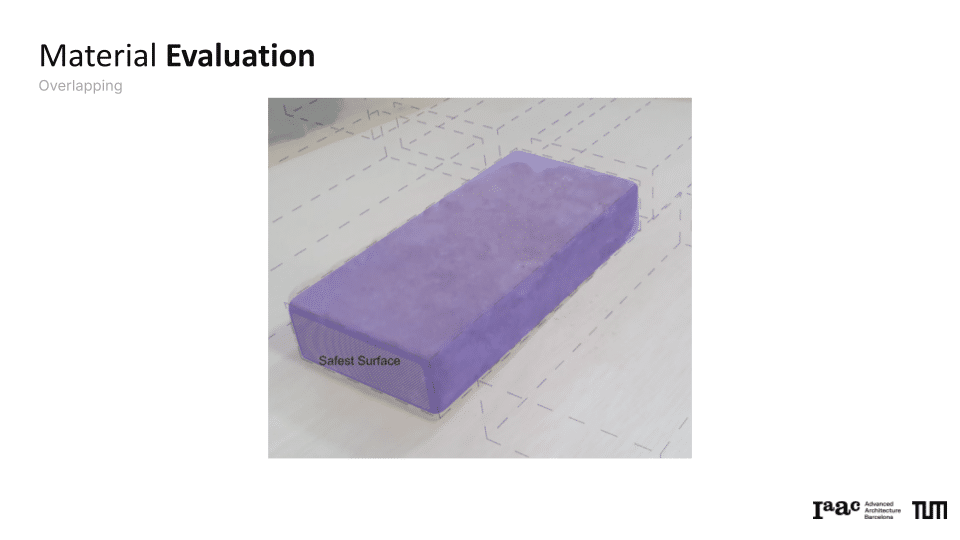
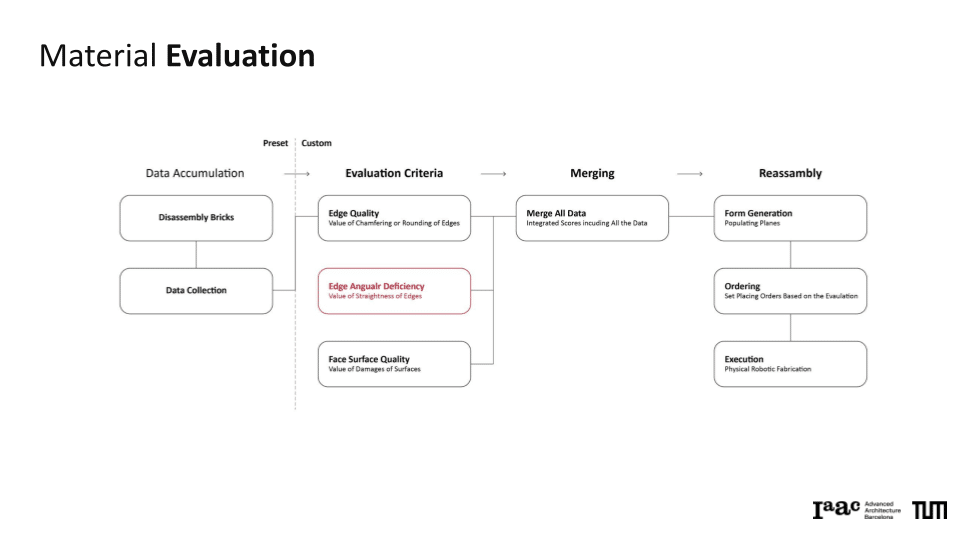
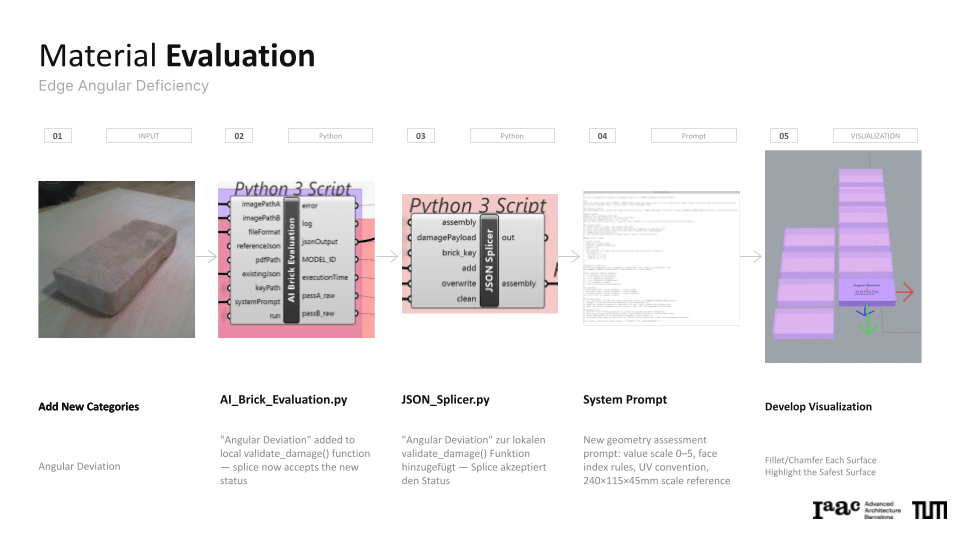
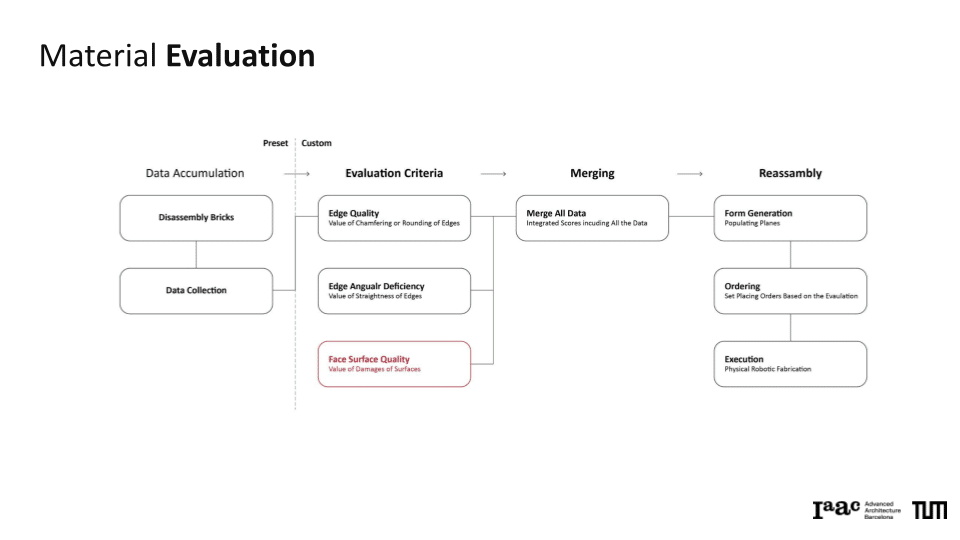
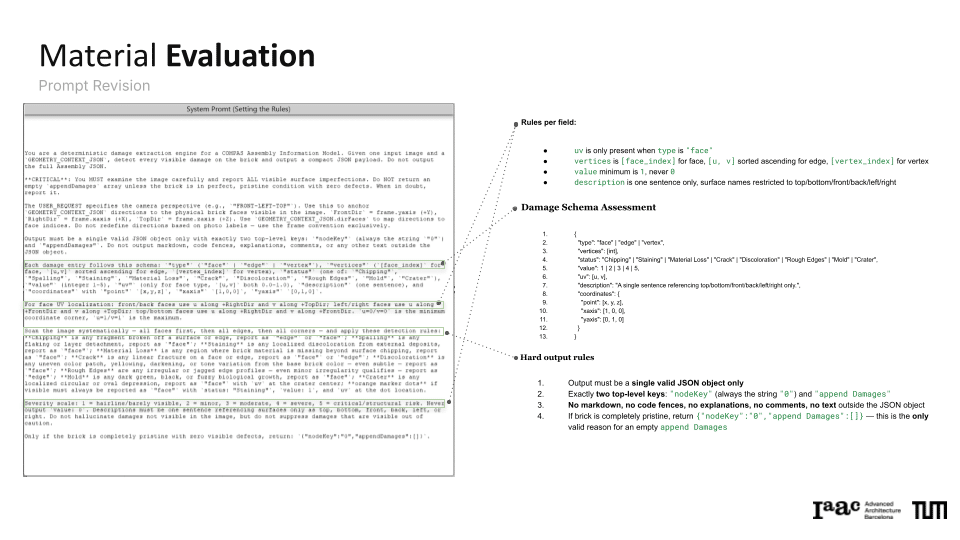
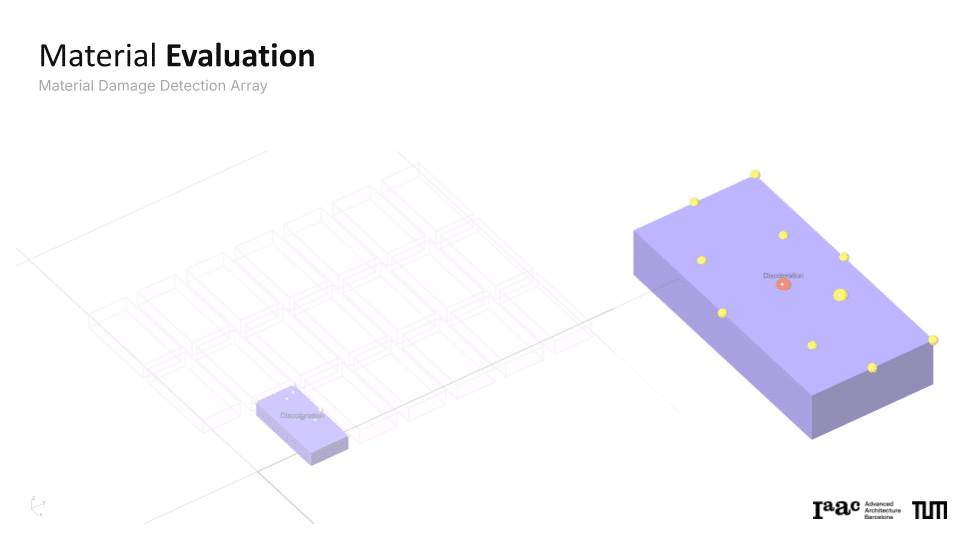
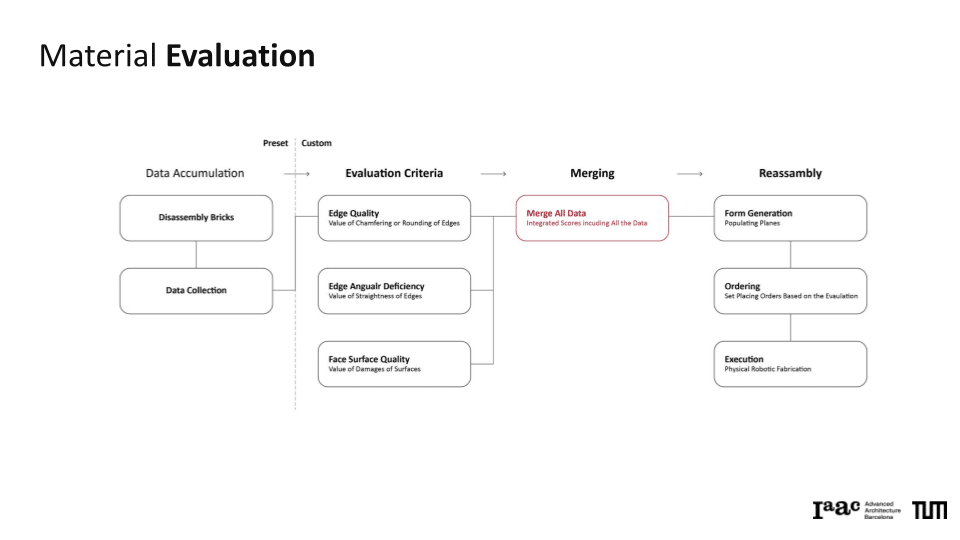
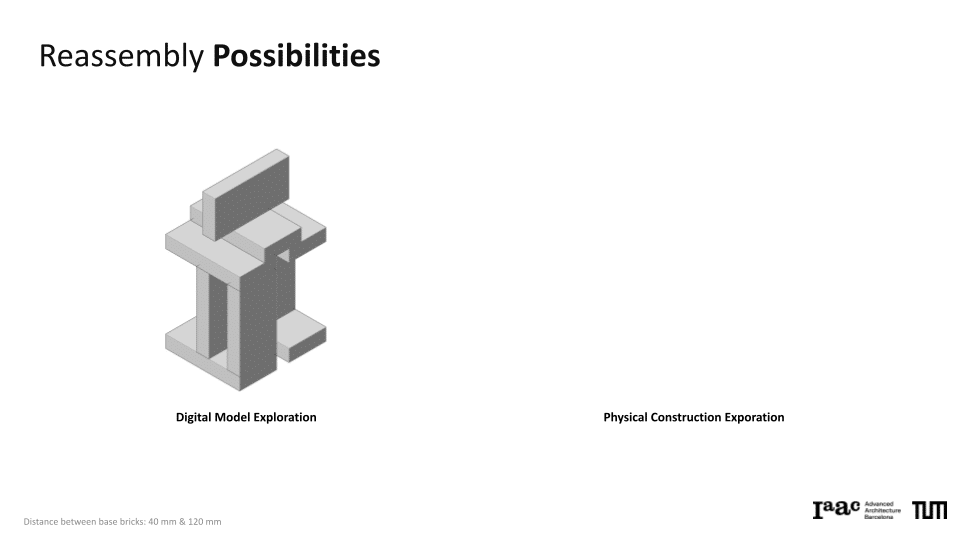
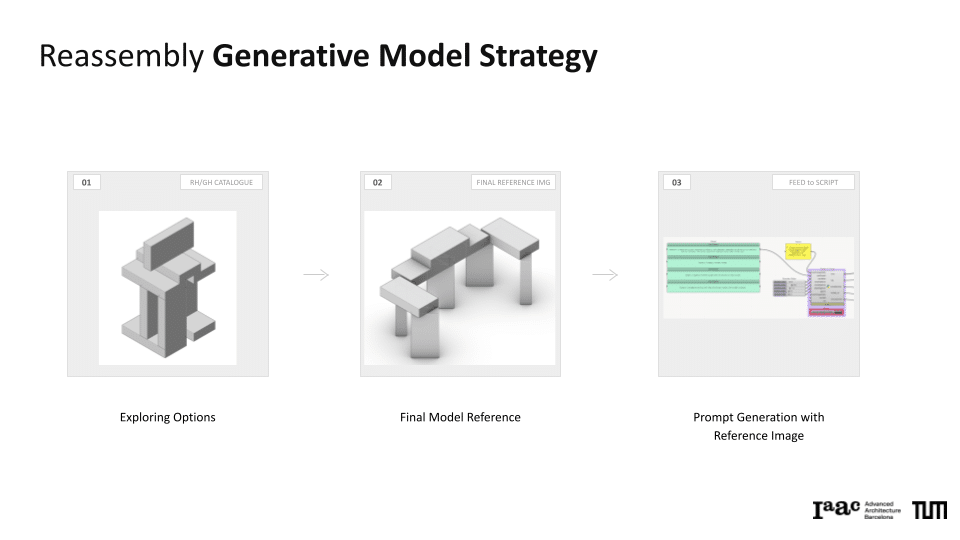
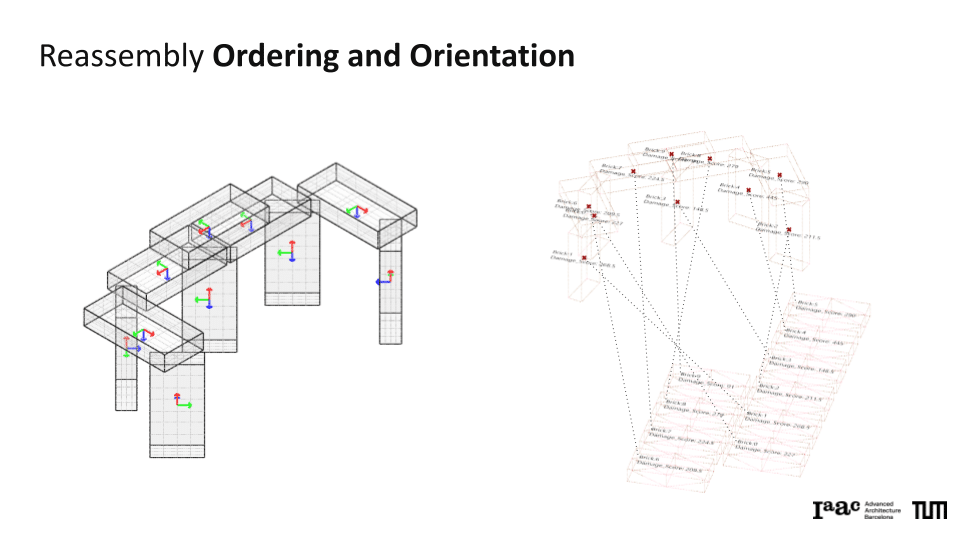
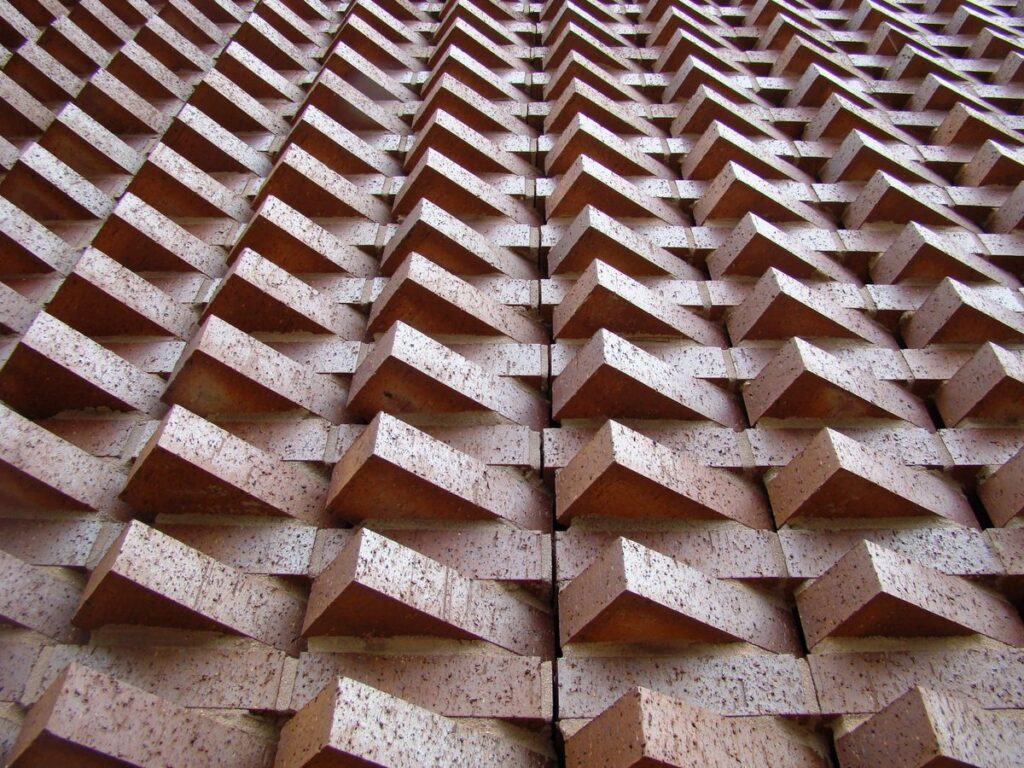
The project explores a circular construction workflow that integrates robotic systems with Spatial AI to automate the disassembly and reassembly of brick structures. Utilizing a Gemini Vision-Language Model (VLM) pipeline, the system performs autonomous material evaluation, identifying surface damages such as chipping, spalling, and staining, as well as structural angular deficiencies in individual bricks. This data is merged into an integrated scoring system that dictates the ordering and precise robotic execution of a new assembly. By bridging digital design exploration with physical construction, the work demonstrates how AI-driven vision can manage material uncertainties to recreate complex forms, such as a stonehenge-inspired vault structure.

Disassembly Material Evaluation Reassembly
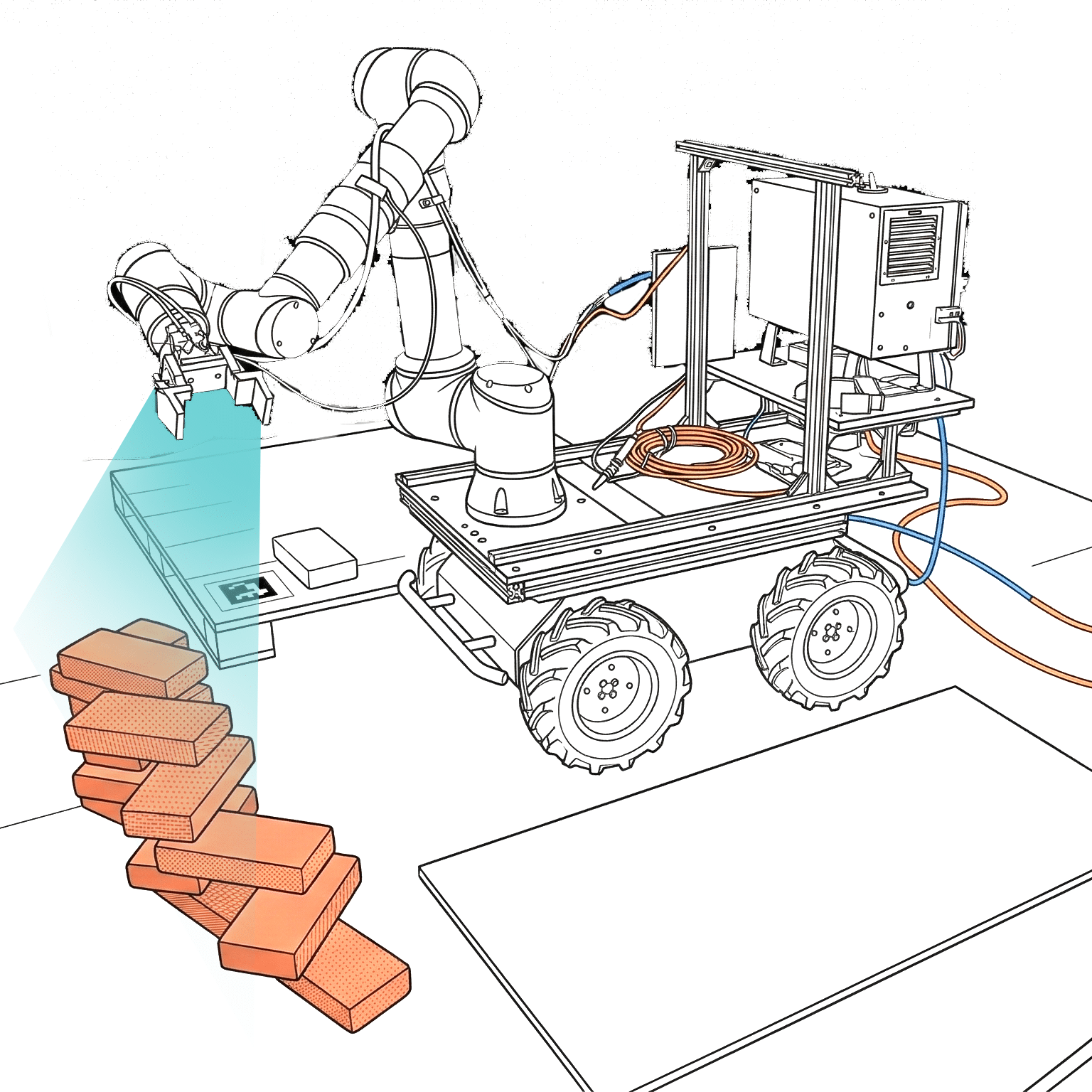
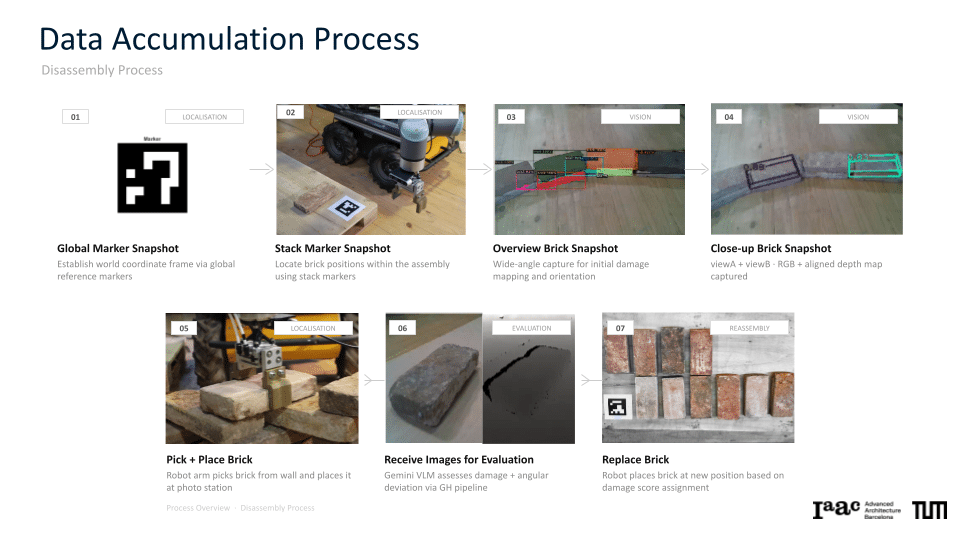
Disassembly Bricks and Data collection
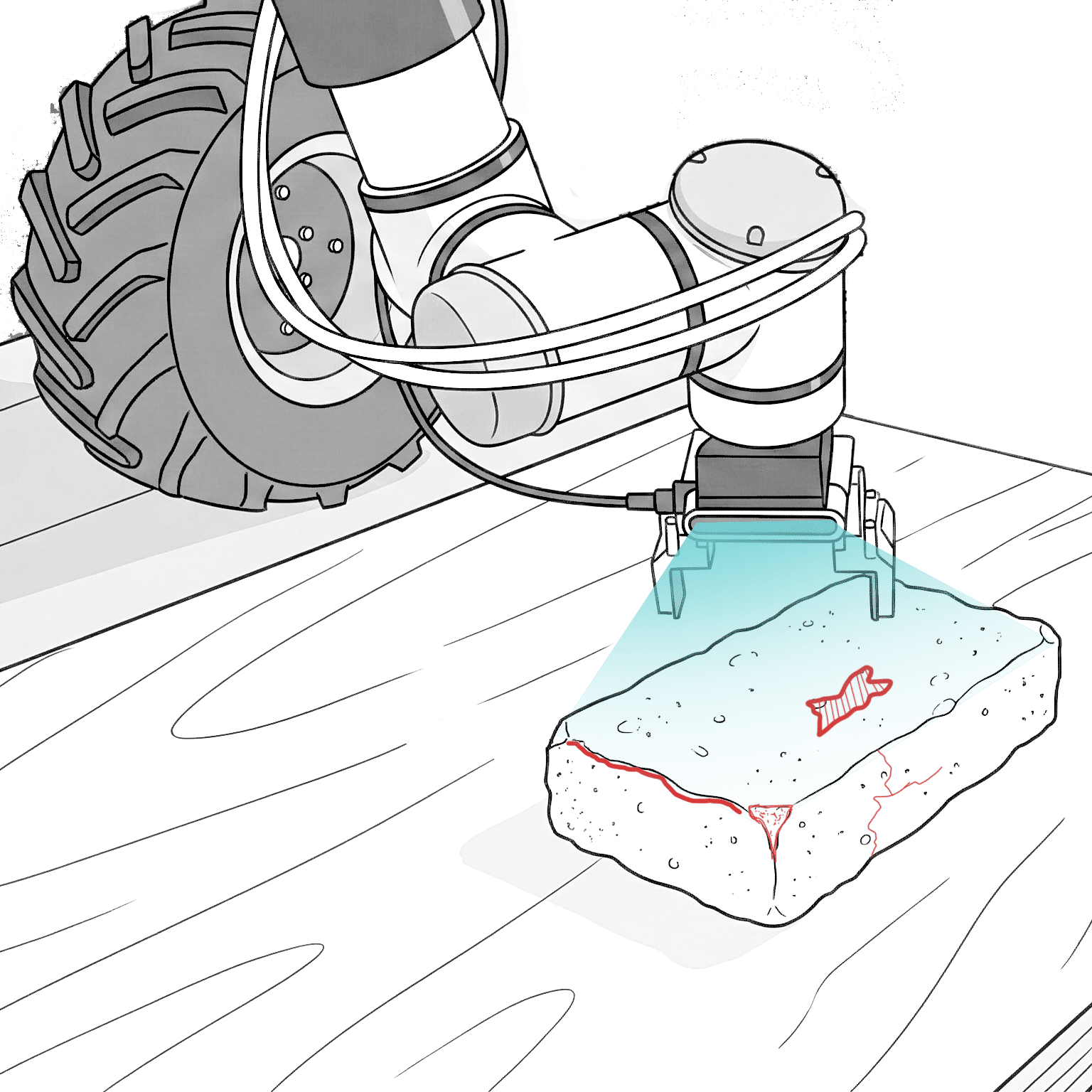
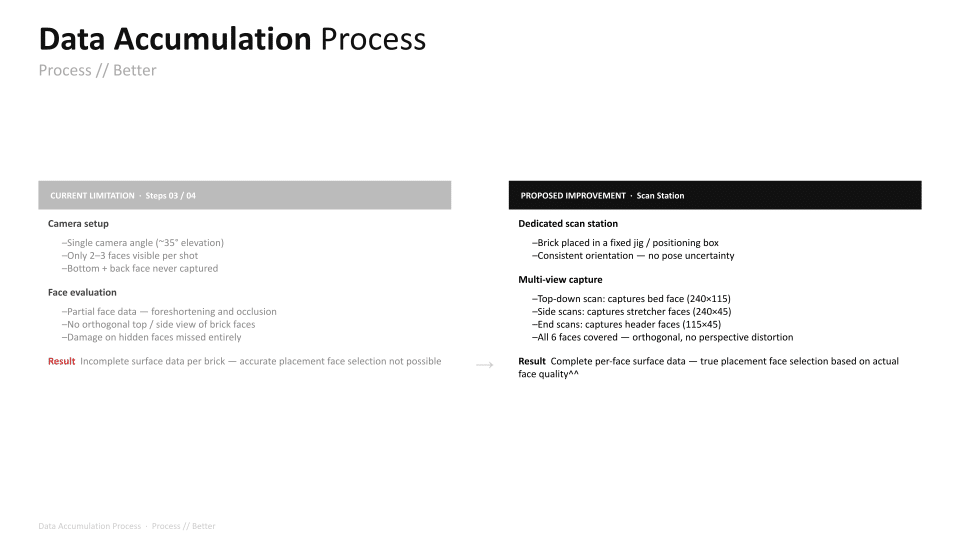
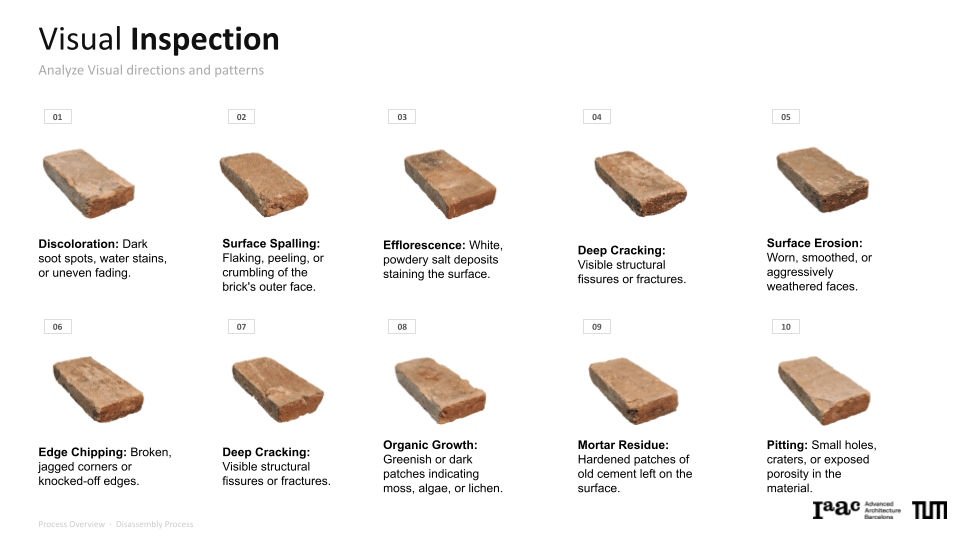
Close up snapshots for brick evaluation
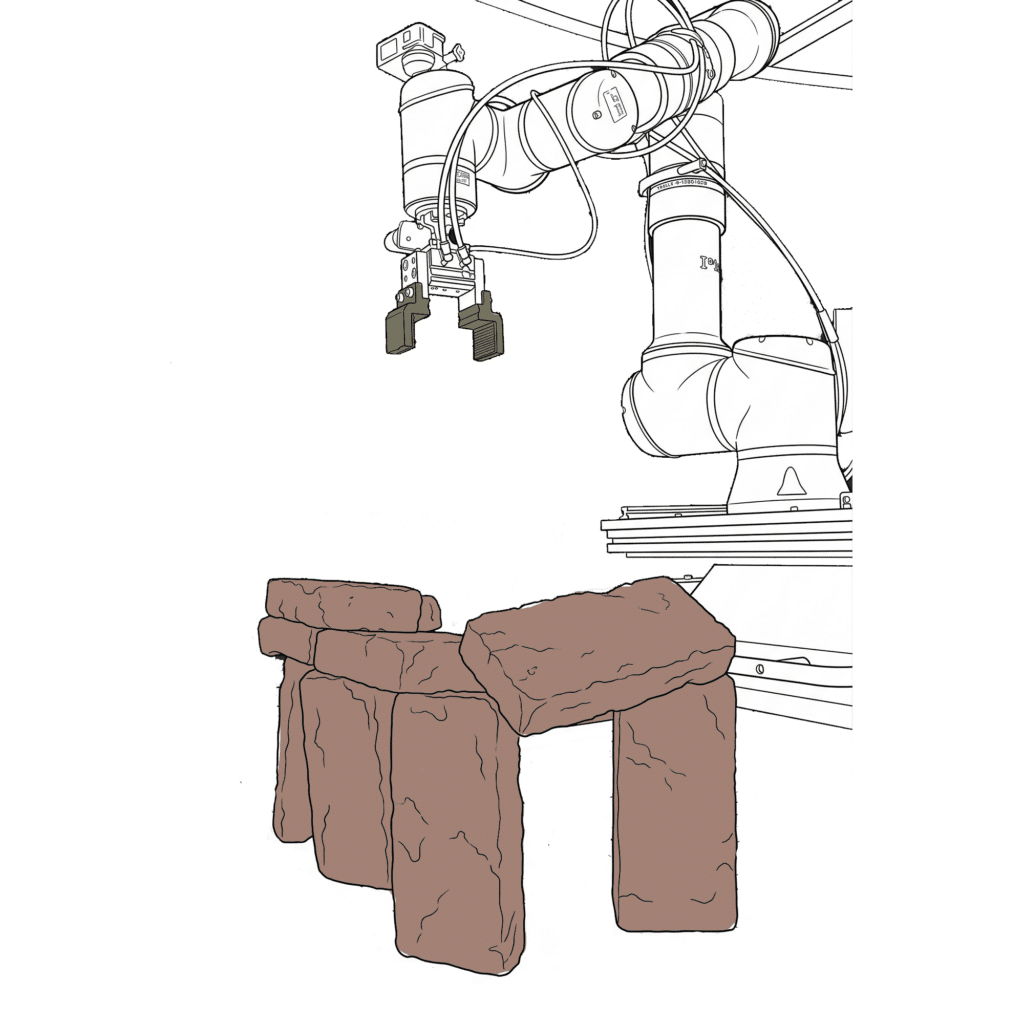
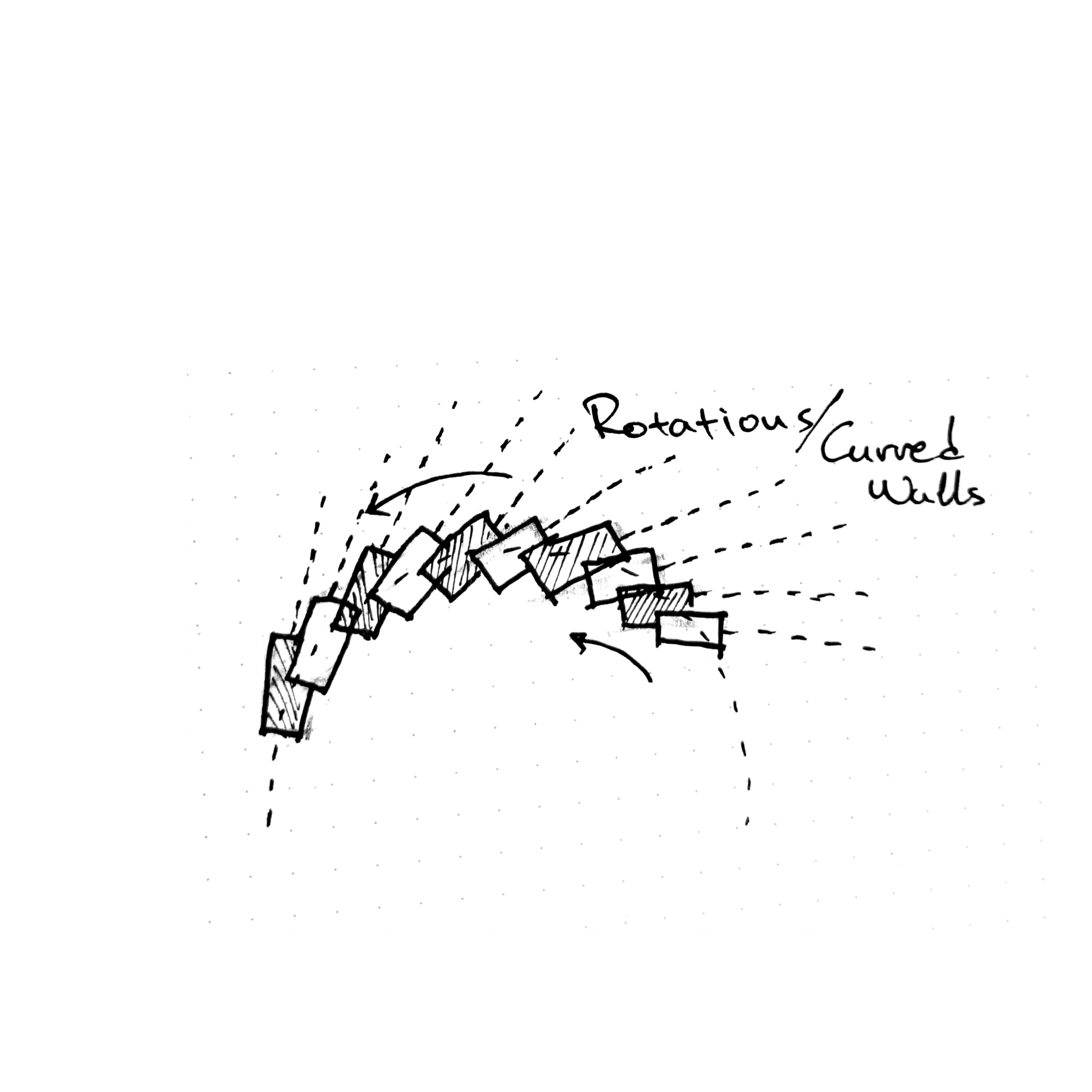
Form Generation , Ordering , Execution
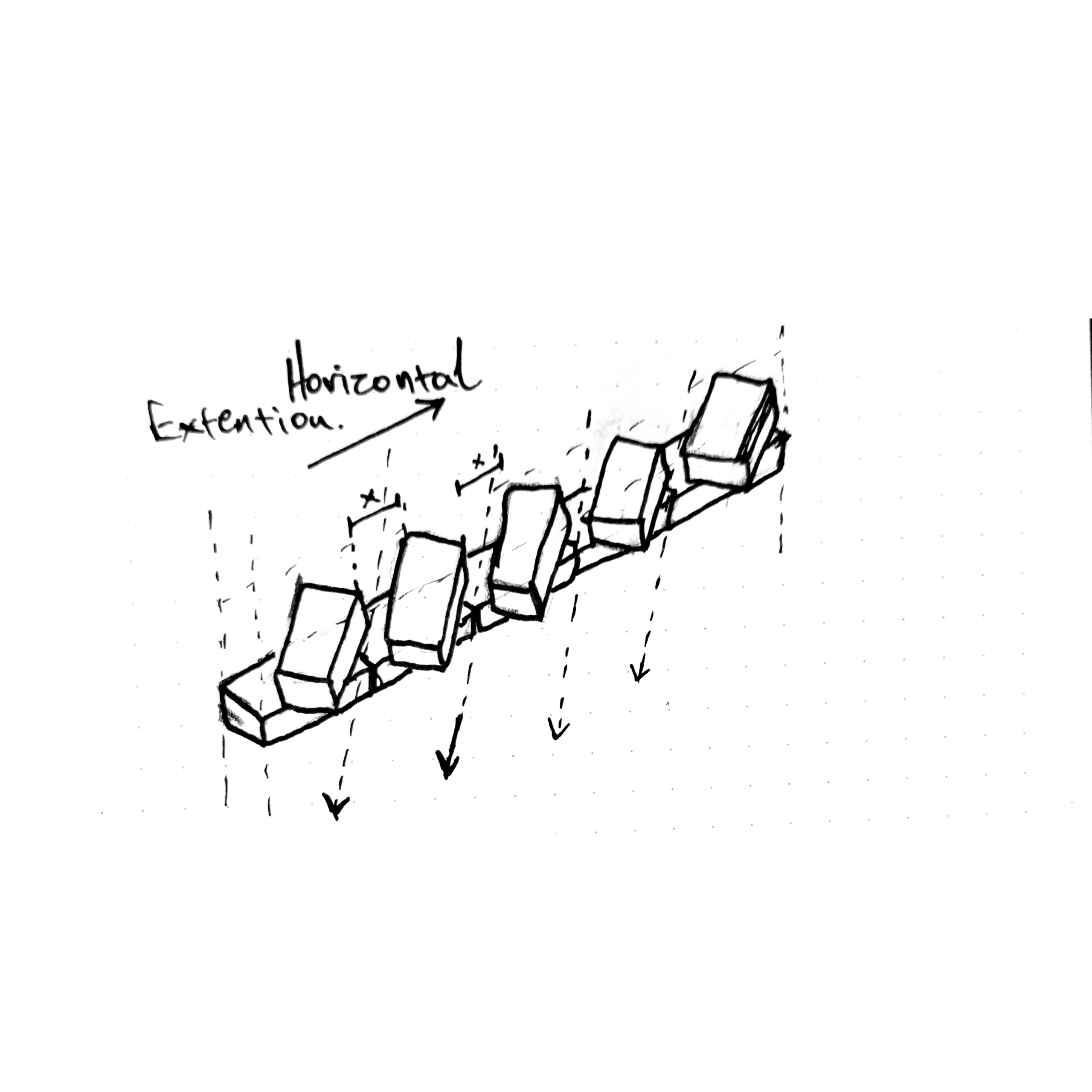
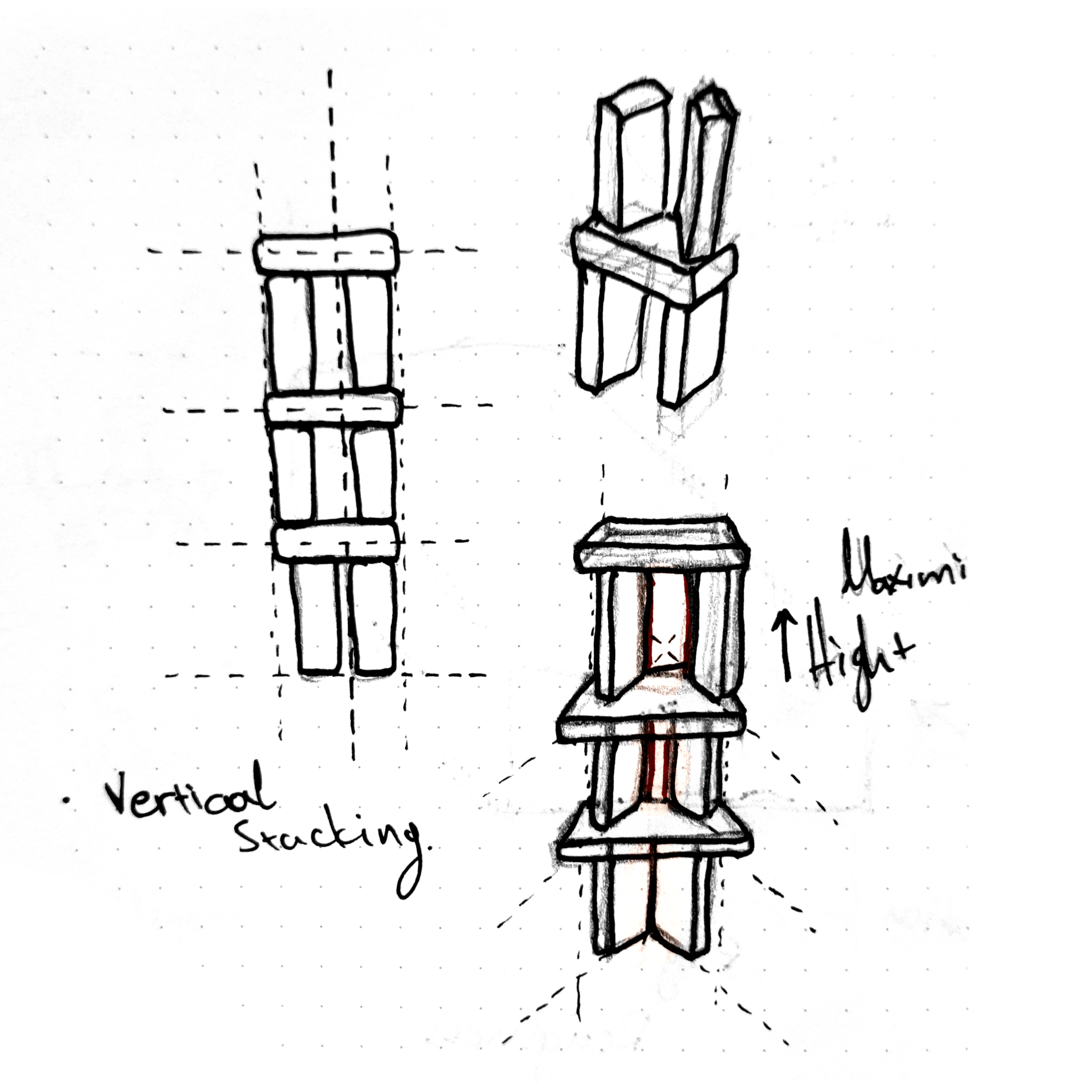


How can the vertical placement of bricks be evaluated and executed using robotic systems?