
Dynamic Casting of Functionally-Graded Geopolymers Using Urban Excavation Waste

Thesis Abstract
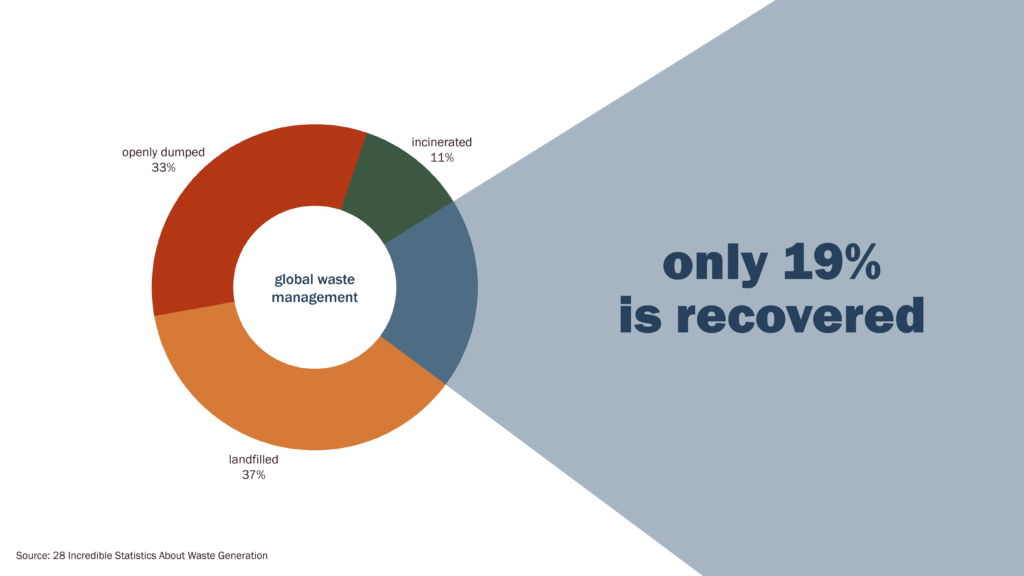
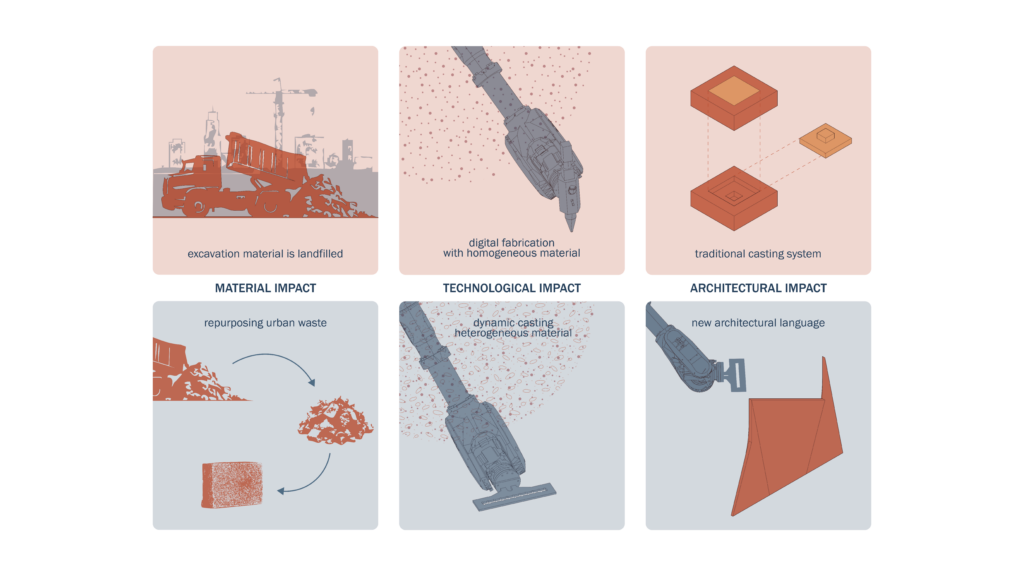
It is estimated that in the next 15 years, the world will generate over 3 billion tonnes of waste; in the European Union alone, 35% originates from the construction sector due to demolition, excavation, and dredging (“28 Incredible Statistics About Waste Generation,” 2021). These figures highlight the urgent need to rethink material systems in contemporary cities. Despite its abundance in urban contexts, excavation material is often discarded due to its heterogeneity, while current digital construction systems depend on homogeneous inputs. This thesis investigates how the variability of excavation material can be leveraged through functionally graded geopolymer systems. It asks: how can robotic fabrication enable the production of functionally graded, urban waste-based geopolymers? The research hypothesizes that robotic dynamic casting can transform heterogeneous, alkali-activated excavation material into freeform modular components with controlled material distribution and performance.
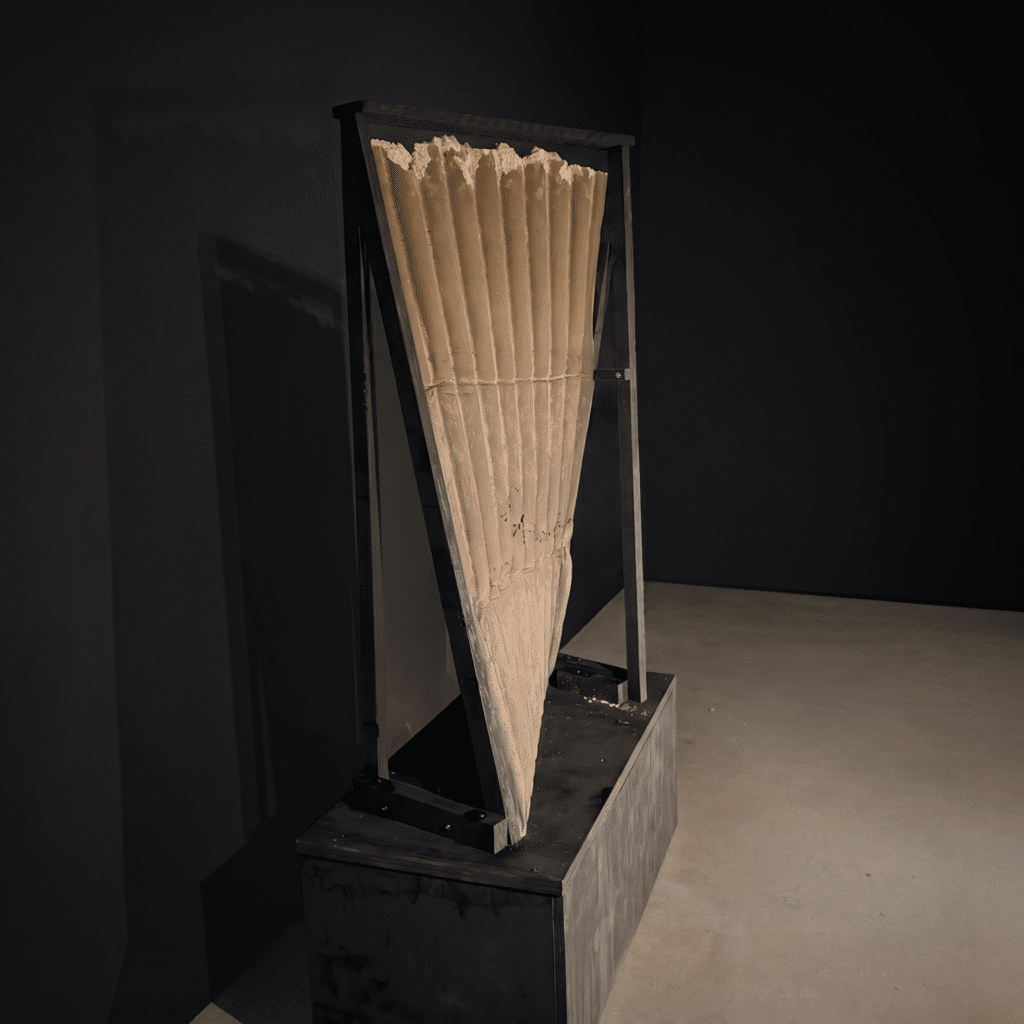
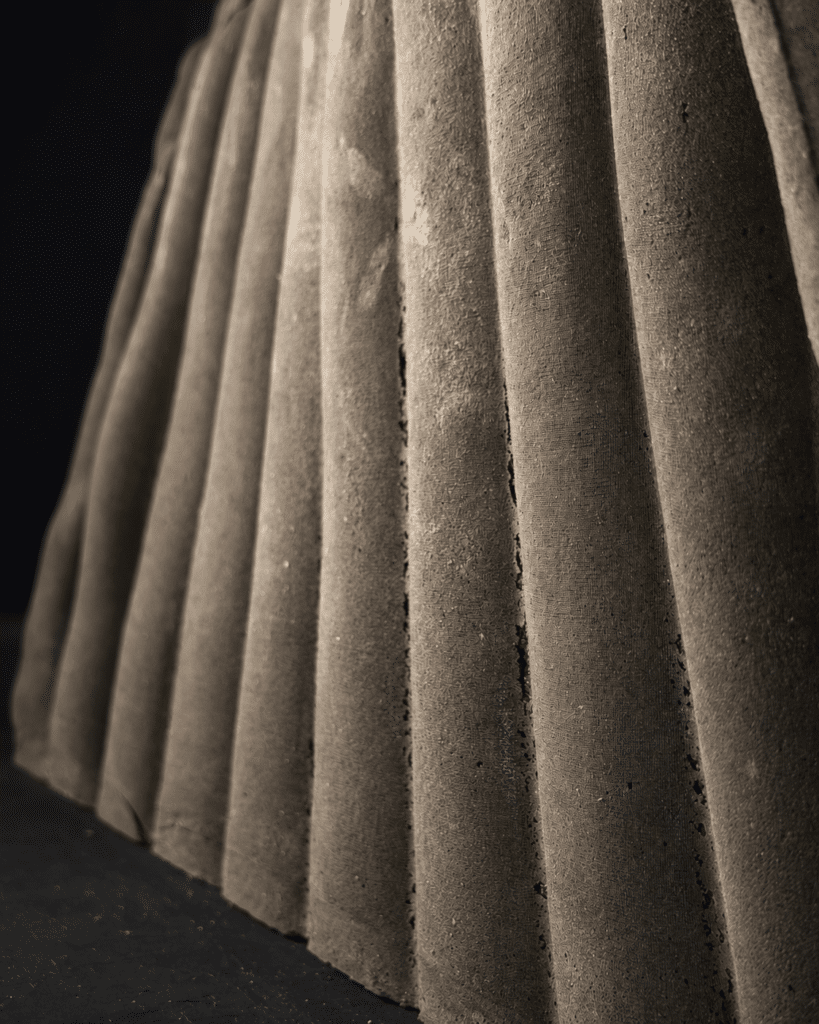
Positioned at the intersection of material reuse and fabrication innovation, the work operates on two fronts. First, it revalorizes excavation material as a primary construction resource through alkali activation. Second, it introduces a robotic dynamic casting system that enables material grading without extrusion-based constraints. Here, a flexible membrane formwork acts as an active agent, continuously reconfigured to shape geometry during casting. The hypothesis is tested through prototyping, material testing, and fabrication experiments using this dynamic casting system. Within this system, alkali-activated excavation material is cast into a continuously reconfigurable mold, enabling the production of freeform, functionally graded modular elements. The research ultimately proposes a scalable framework for integrating urban waste streams into high-performance architectural components, contributing to a circular, low-carbon construction paradigm.
Context
We focused specifically on urban excavation waste, which consists of the soil, rock and mineral material extracted from excavation works in cities. This material is typically landfilled and underused because it’s considered waste, contaminated and most importantly heterogeneous, making it highly unstable and therefore, incompatible with current digital fabrication systems.

So we ask: How can we stabilize this heterogeneous material?
As a material that is very unpredictable, we needed a method to not only homogenize it into a stable matrix, but make it controllable. After doing research, we landed on geopolymers as our strategy.
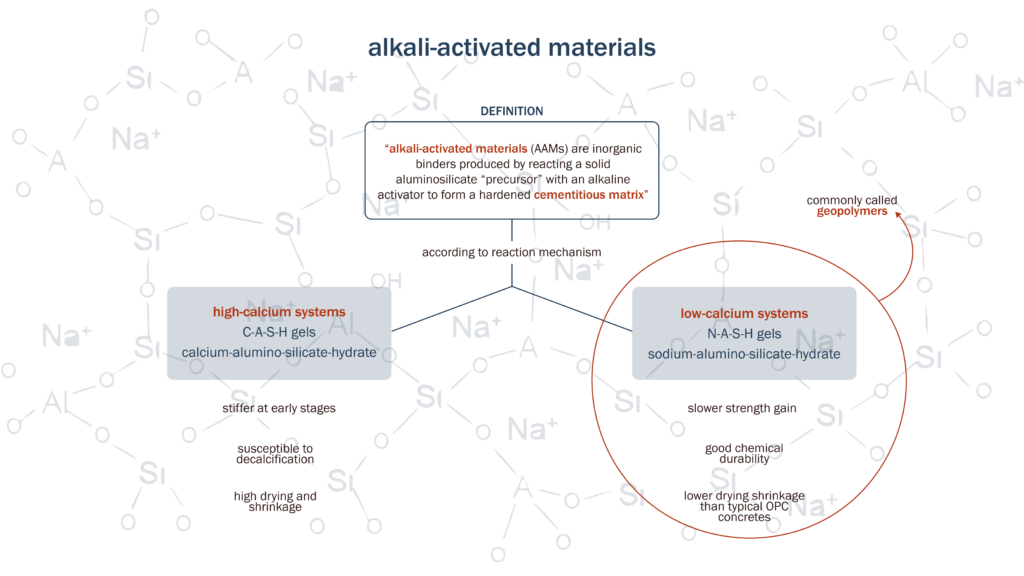
What are geopolymers?
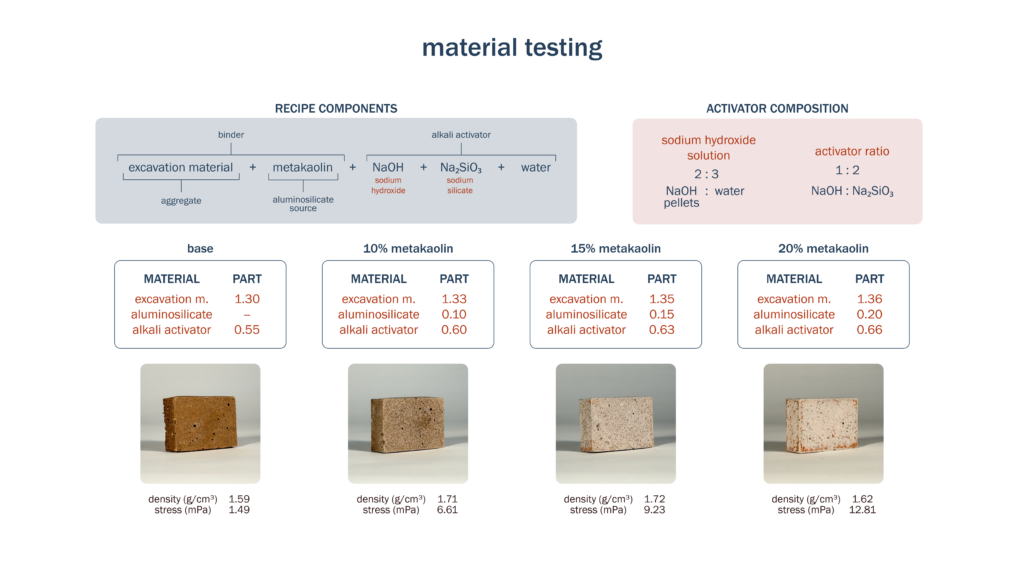
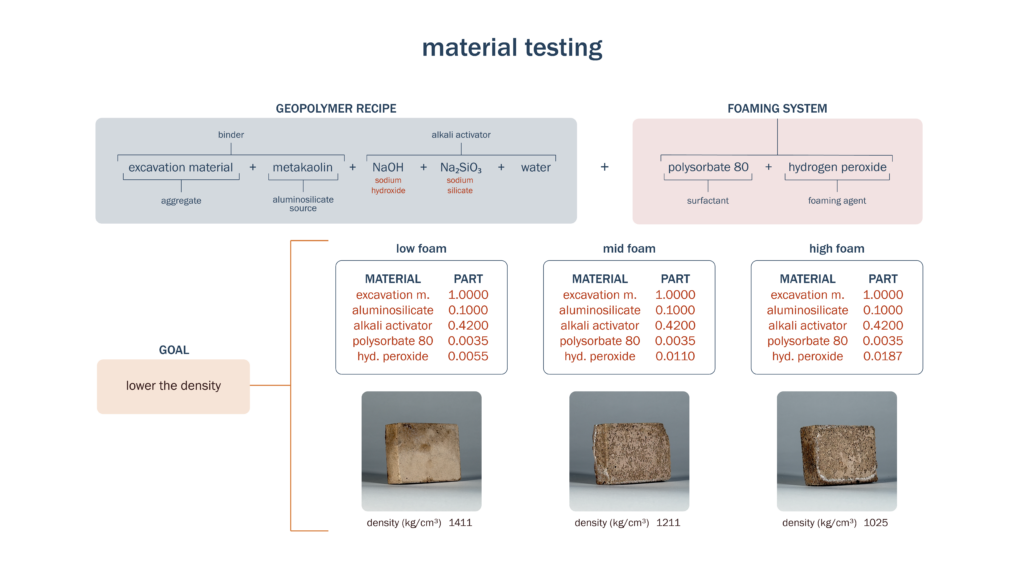
Falling under the category of alkali-activated materials, they are a cementitious binder created through a chemical reaction between an aggregate, an aluminosilicate source and an alkali activator.
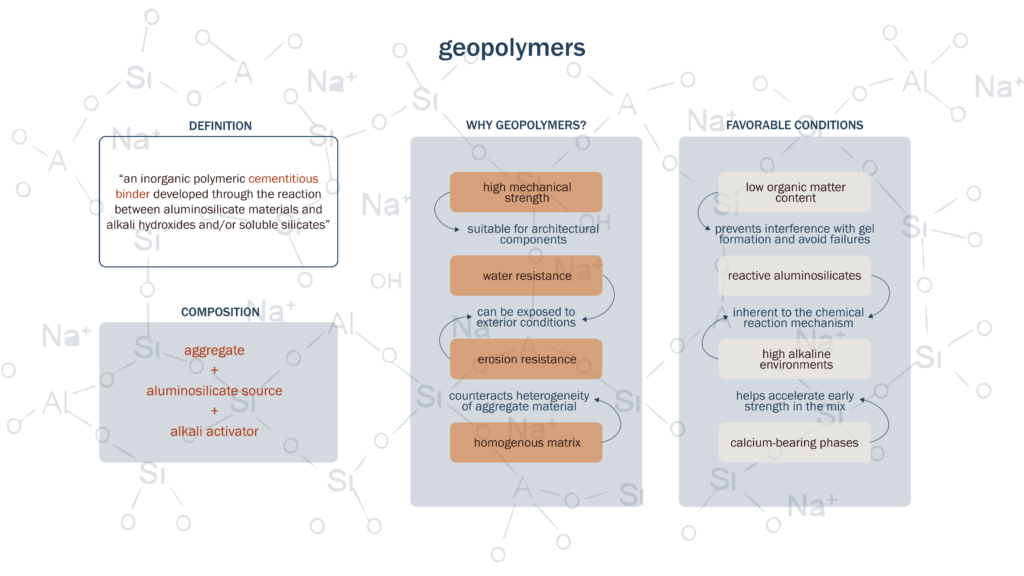
How are geopolymers a suitable approach to homogenizing urban excavation waste?
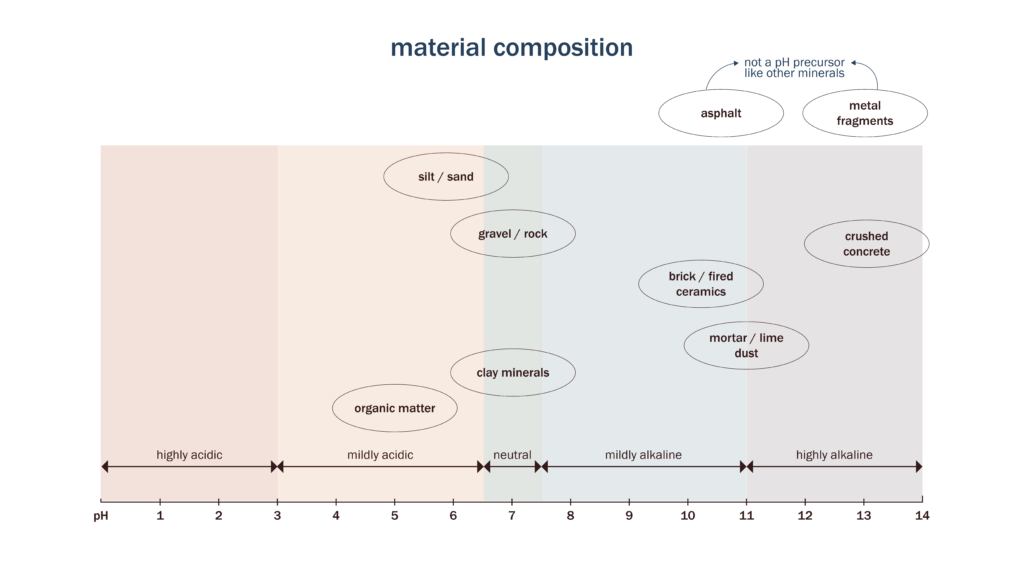
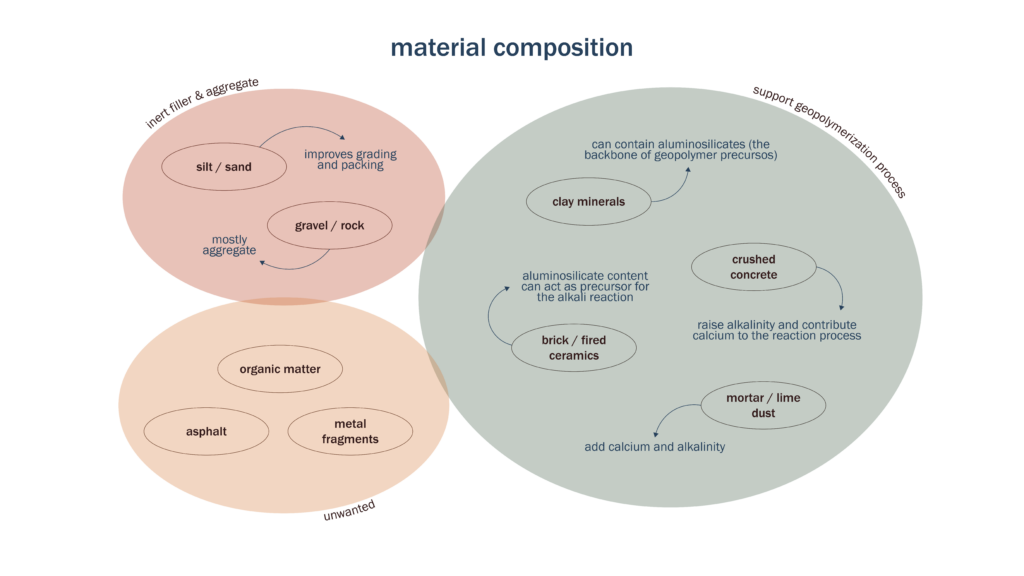
The composition variability within urban excavation waste shows pH values that lean more alkaline, which can help enhance the chemical reaction of the geopolymerization. Also, the different materials within offer different properties to the overall matrix created alkali-activation.
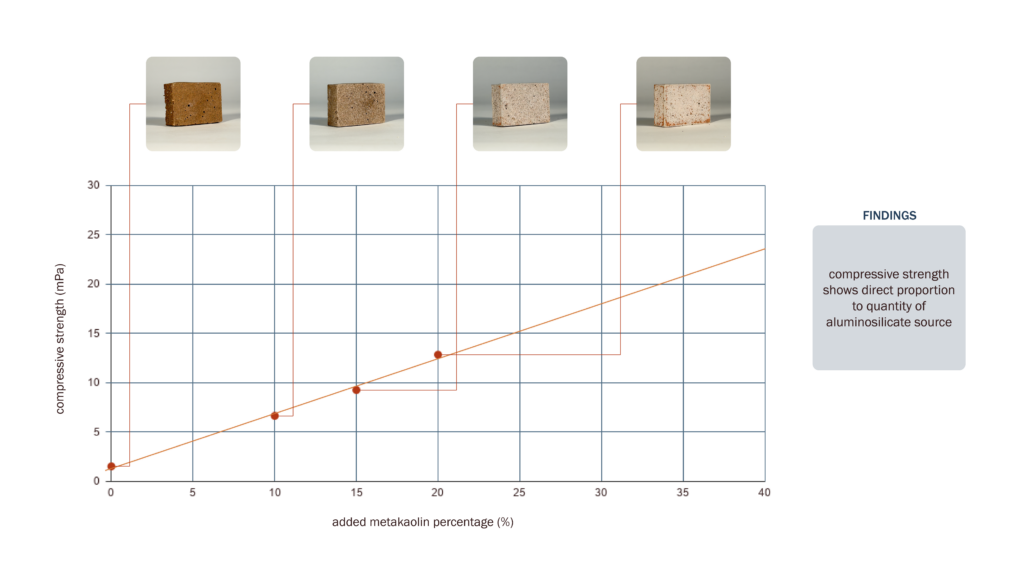
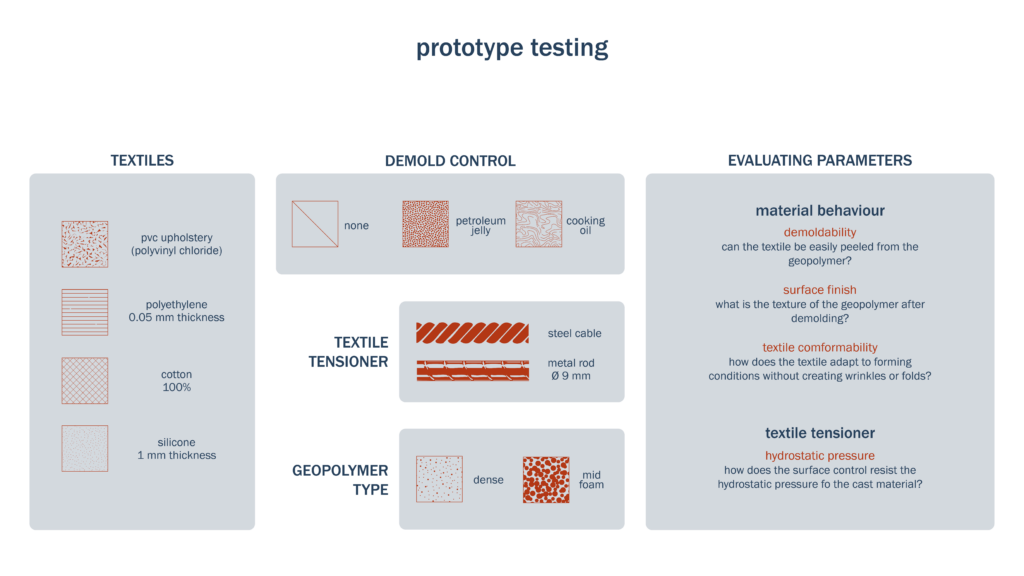
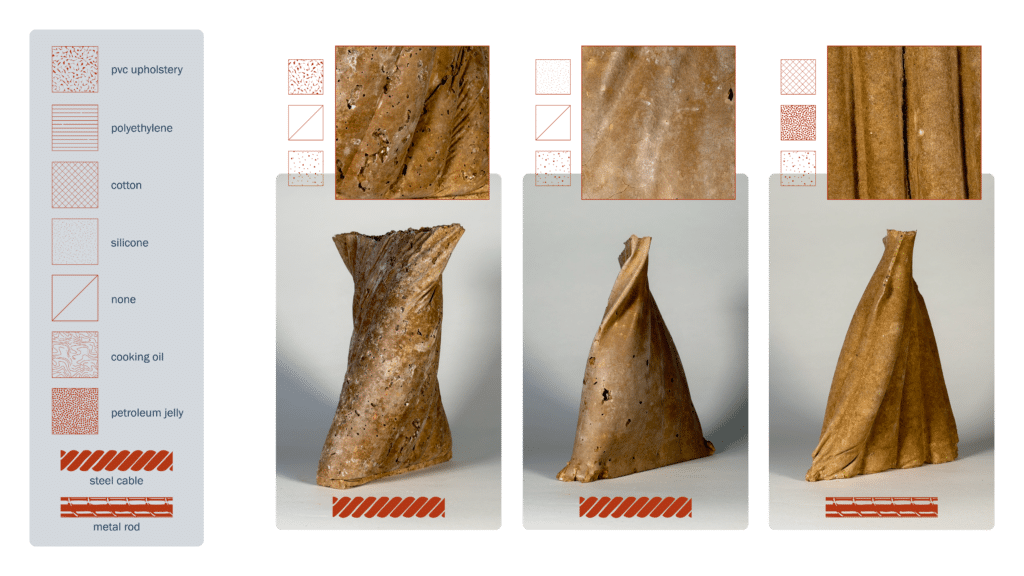
Material Testing
Geometrical Logic
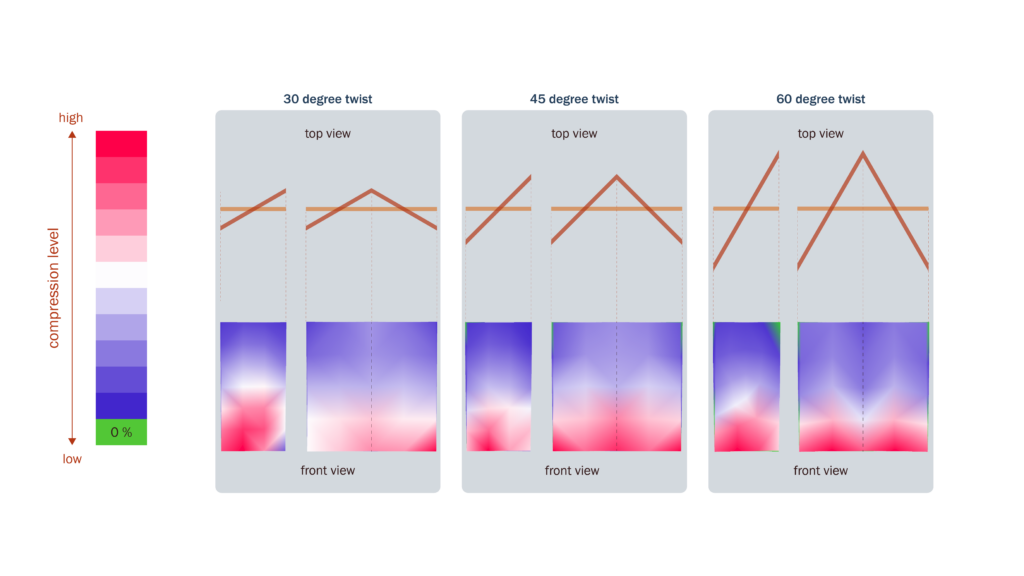
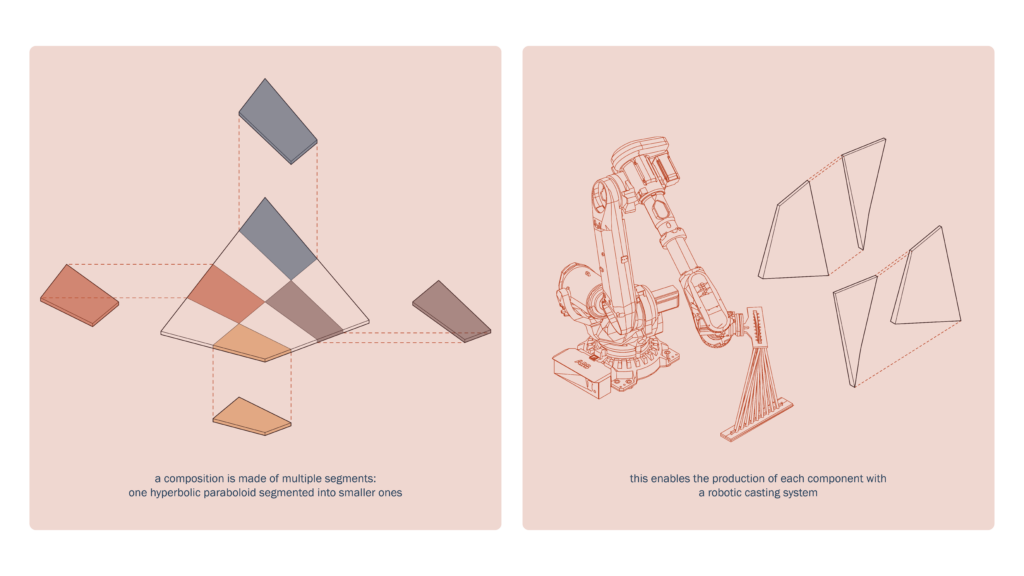
Seeing that this material works mostly in compression, our next step was to look at the geometries that would be most suitable for optimizing its structural properties. Ruled surfaces and double curvatures are great geometries for structural efficiency as they increase the rigidity by carrying the load through membrane forces and reduce bending.
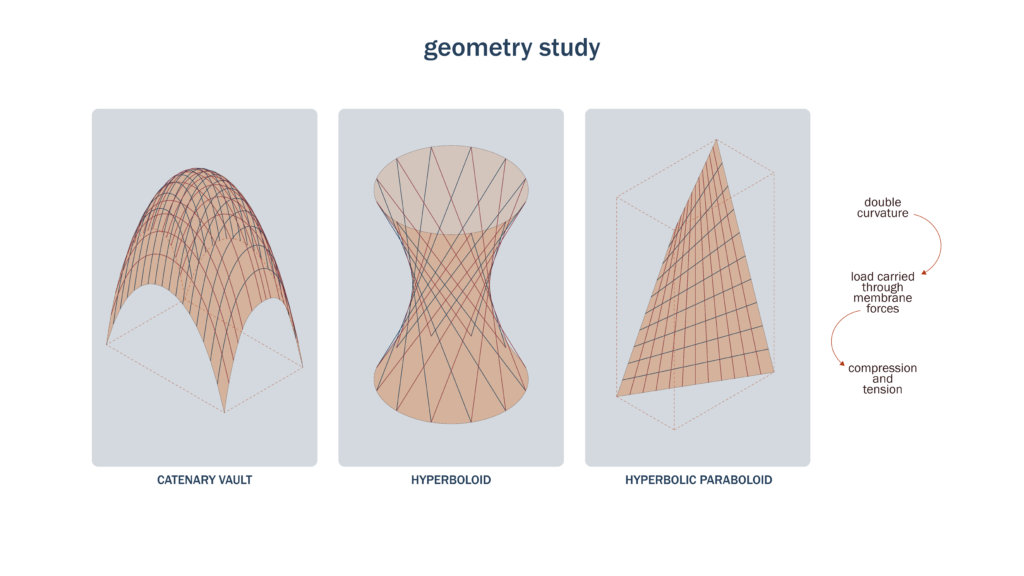
We specifically looked at the hyperbolic paraboloid and used Karamba to simulate the structural behaviour of this geometry. There is a variation in the compression forces on this geometry where the highest concentration is focused mostly at the bottom of the piece and it gradually lowers through the top.
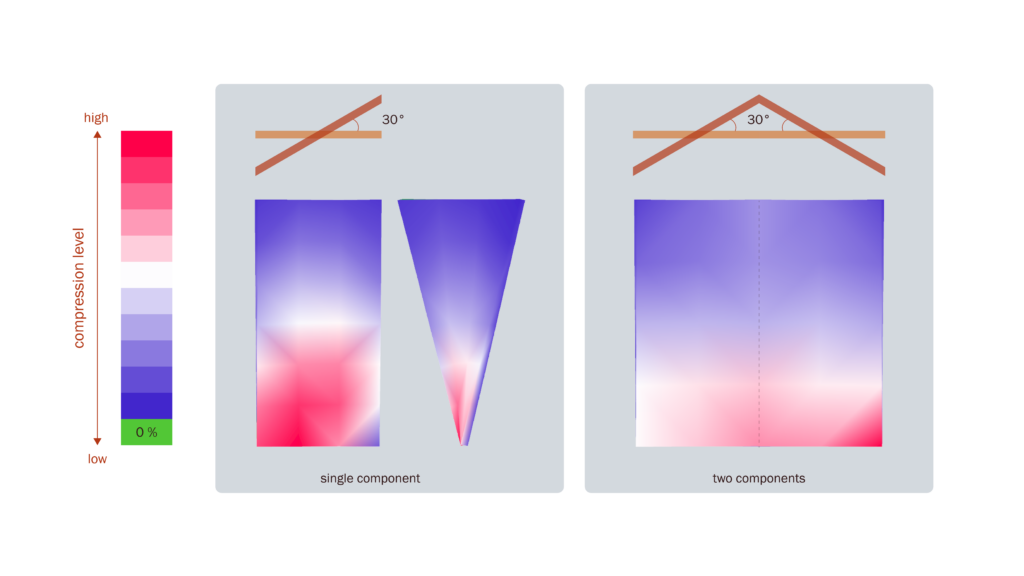
So with this new data: how we could optimize the use of material?
Research Question:
How can robotic fabrication enable the production of functionally graded, urban-waste based geopolymers?
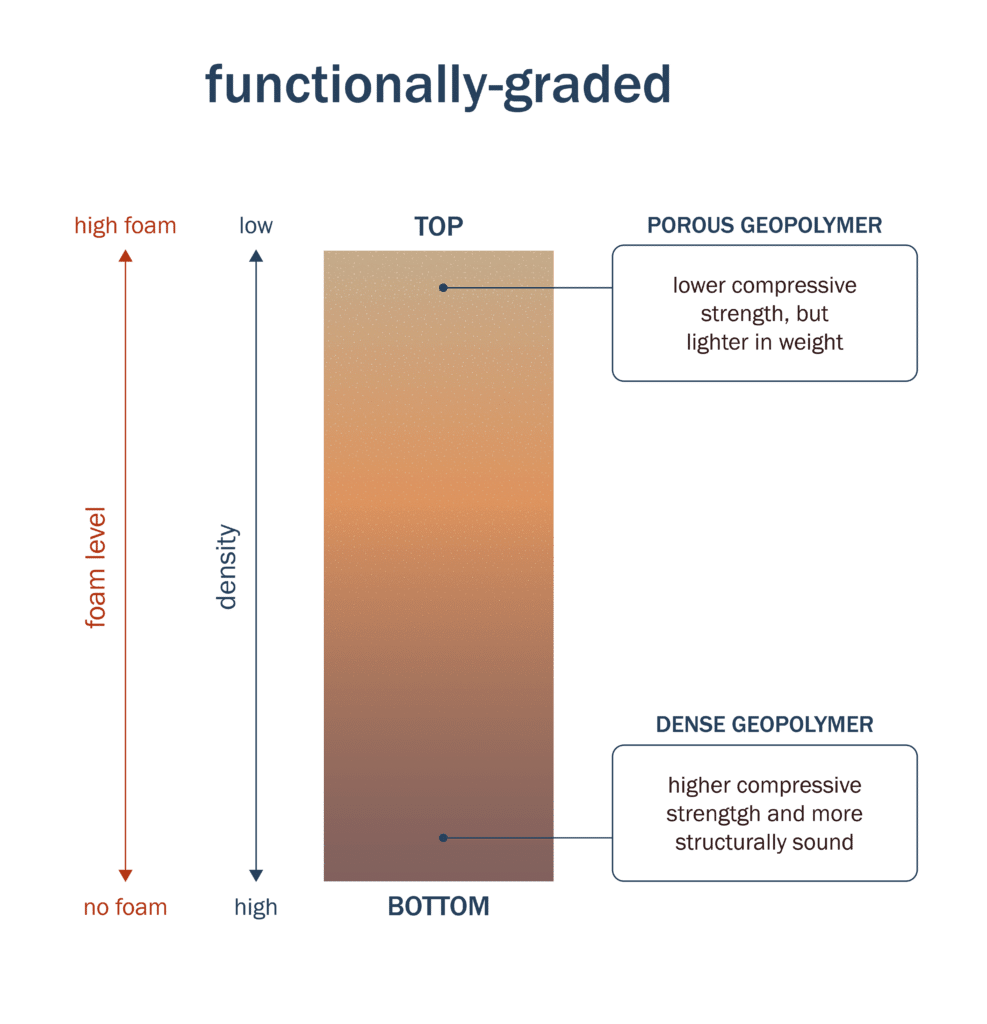
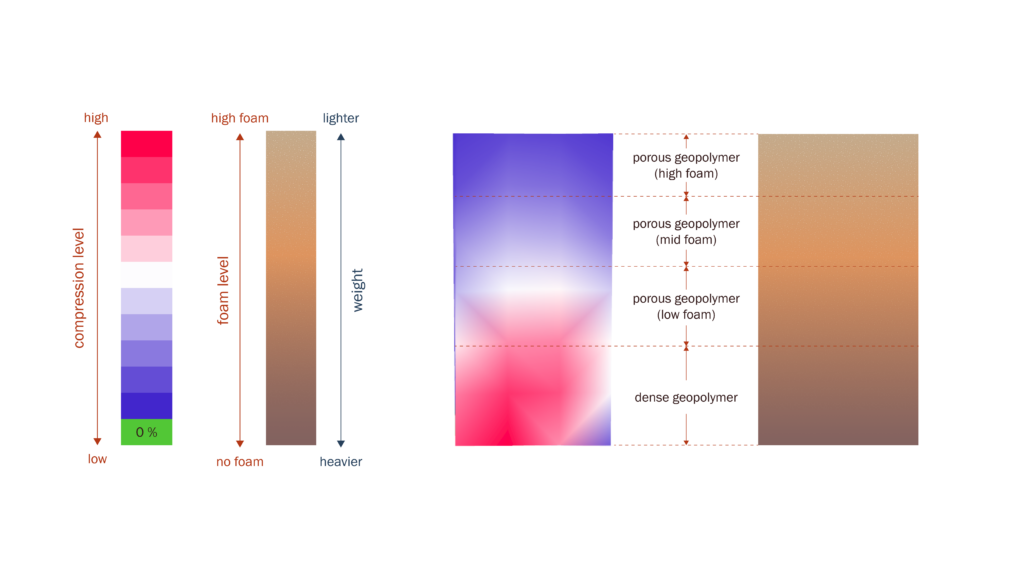
Hypothesis:
Urban excavation waste’s heterogeneity can be leveraged through functionally graded geopolymers, cast with a robotic system without the need for extrusion.
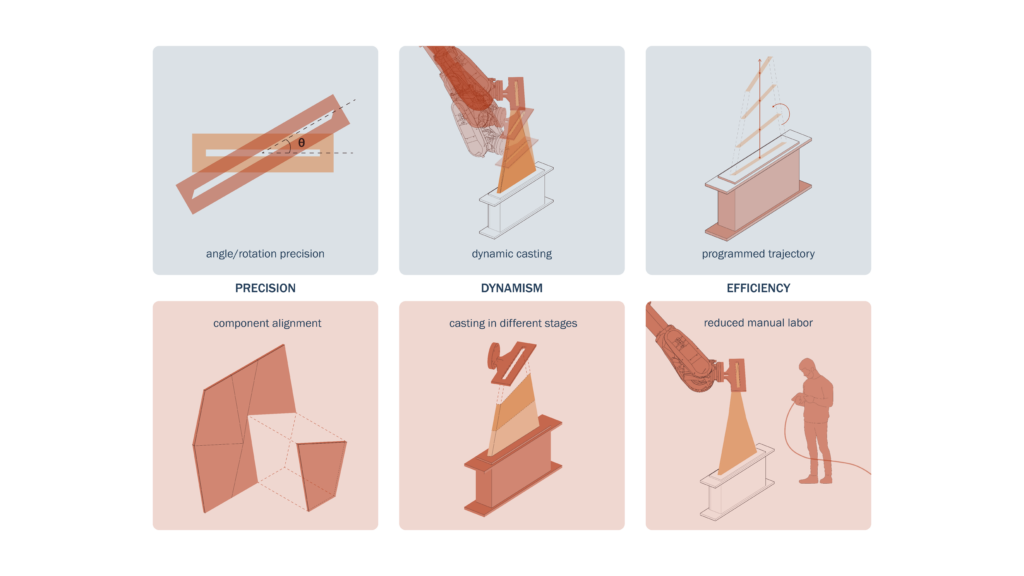
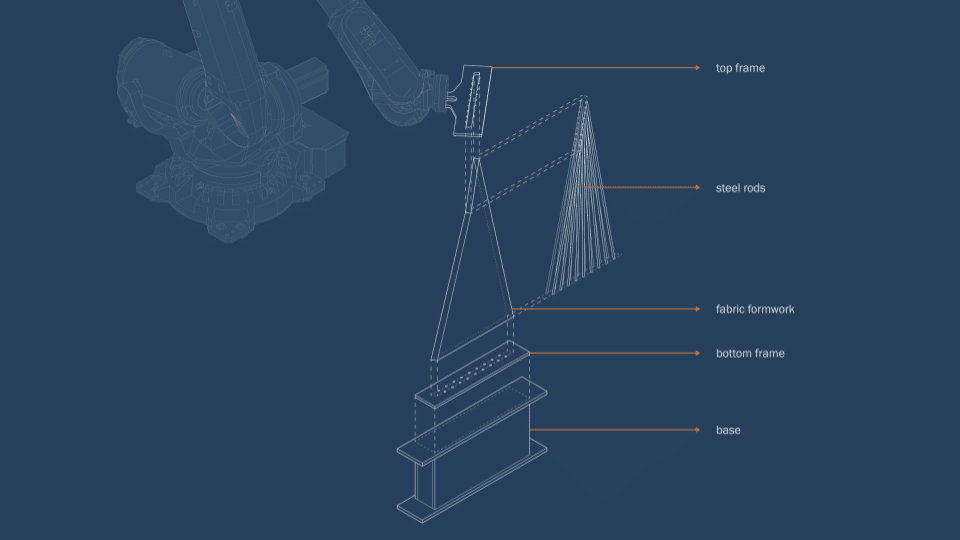
Why use a robotic system for this fabrication?
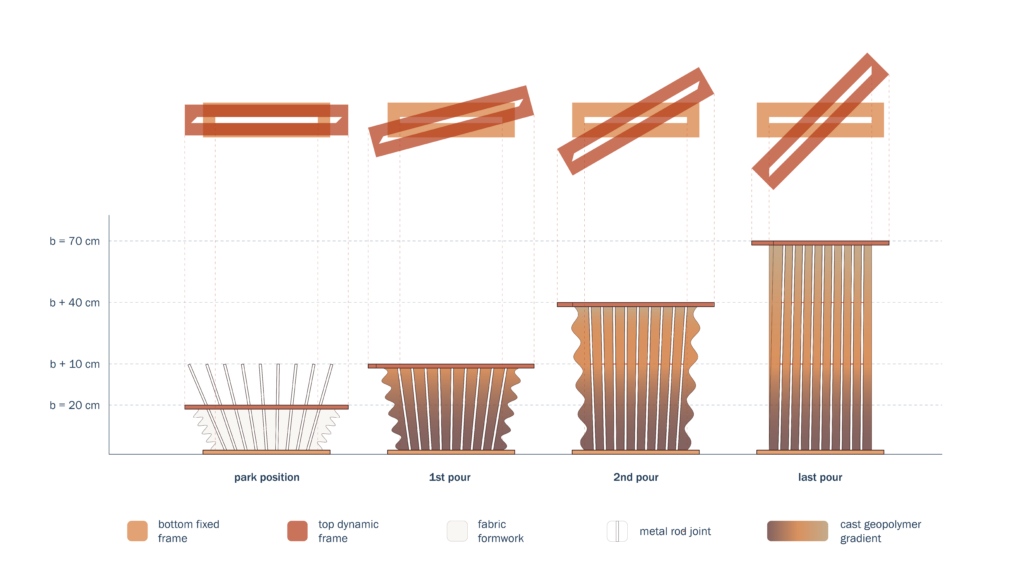
There are three main reasons. The digitized script that is fed to the robot, allows the end-effector (the top frame of the formwork) to move to the desired position at the precise angle/rotation; this enables the seamless assembly of multiple components into a composition. The dynamic casting embedded in the system allows material to be cast in different stages, not only to create the different material layers but because the movement itself allows for the material to settle properly within the fabric formwork. Lastly, there is an aspect of efficiency, where the programmed trajectory of the movement reduced manual labour and allows for the continuous production of components.

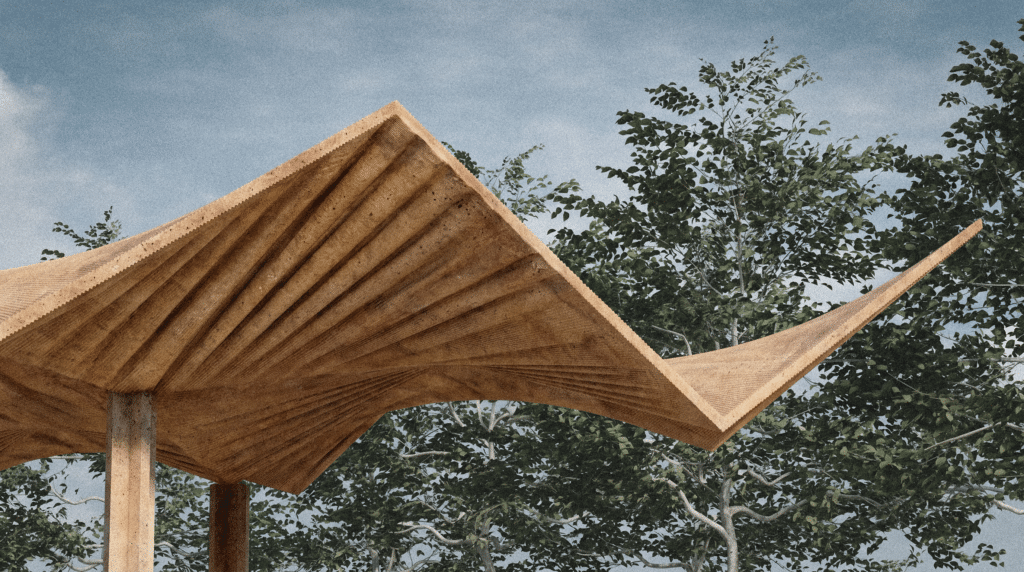
Roof Structure – Render
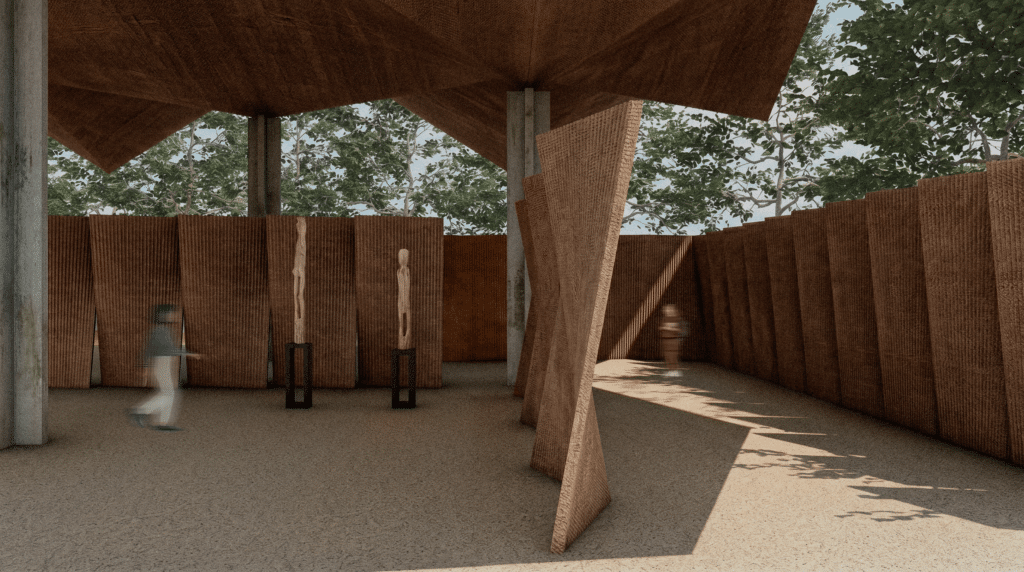
Exhibition Pavilion – Render
Final Prototype

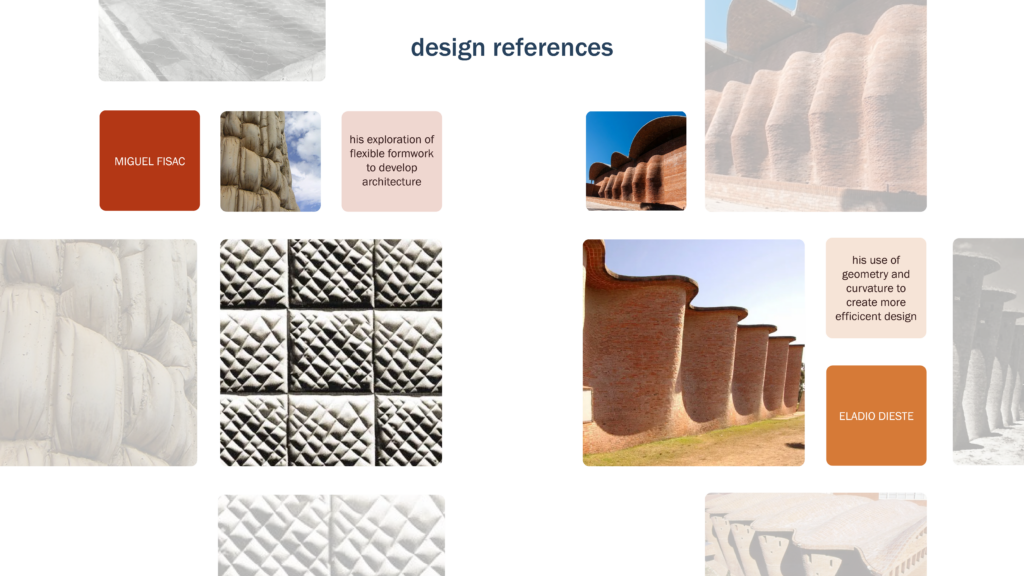
References
