
Project Concept:
The Mars Subtractive Sanctuary Village hosts vertical farming beneath, with circulation acting as a canopy. Sunlight delicately filters through, embracing the celestial surroundings and crafting a breathtaking habitat on the Martian surface. The project’s primary goal is to provide food for 50 Martian settlers using a plant-based diet.

Program and Adaptation Approach:
Comprehensive Research on Plant Species for Food, Oxygen, and Medicinal & Psychological Needs was done and was categorised by Function, Area, and Sunlight Requirements. Using the stacking method, the planting area was then reduced according to small, medium, and large size. A comparison of the living-to-plant area ratio was studied for 1 person and 50 people. A modular massing approach using voxelisation was chosen to accommodate the required area.
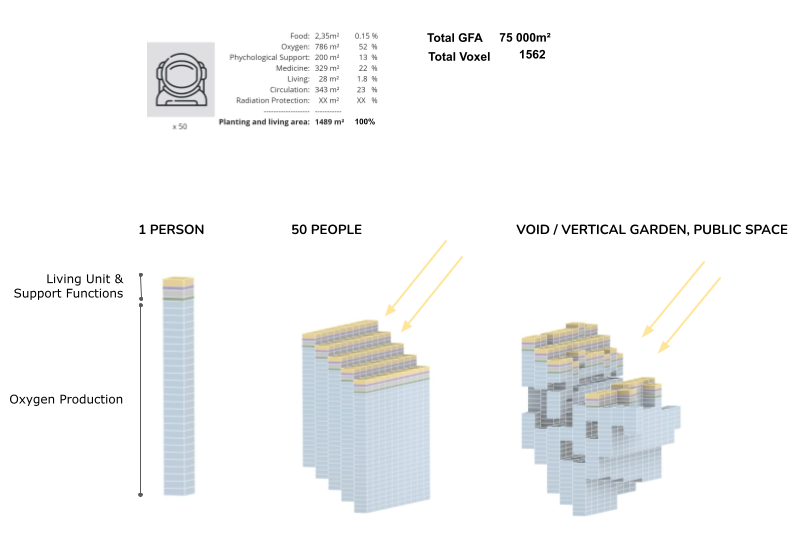
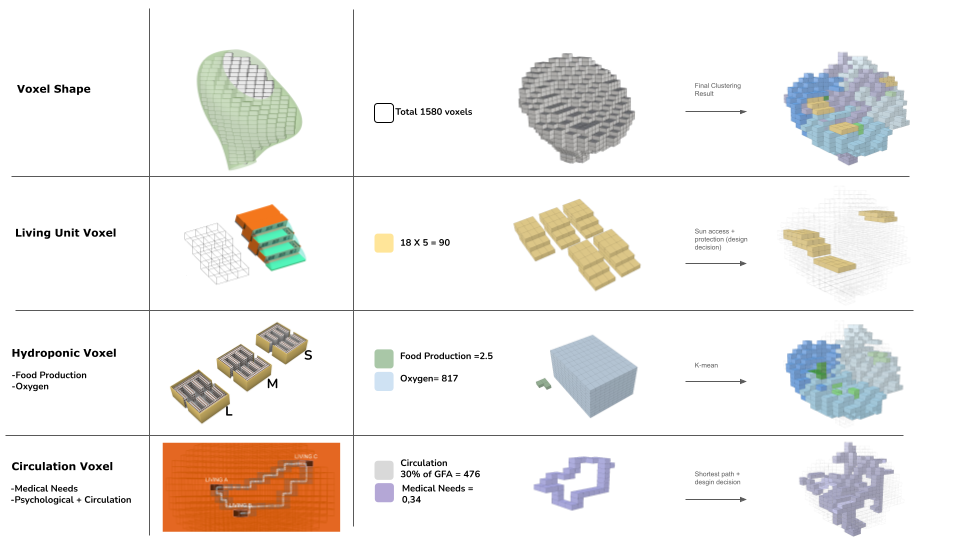
The functional distribution was explored within the voxelisation system, categorised into Living voxels, Hydroponic voxels( consisting of Food Production and oxygen requirements), and circulation voxels connecting the living modules with each floor of the planting modules.
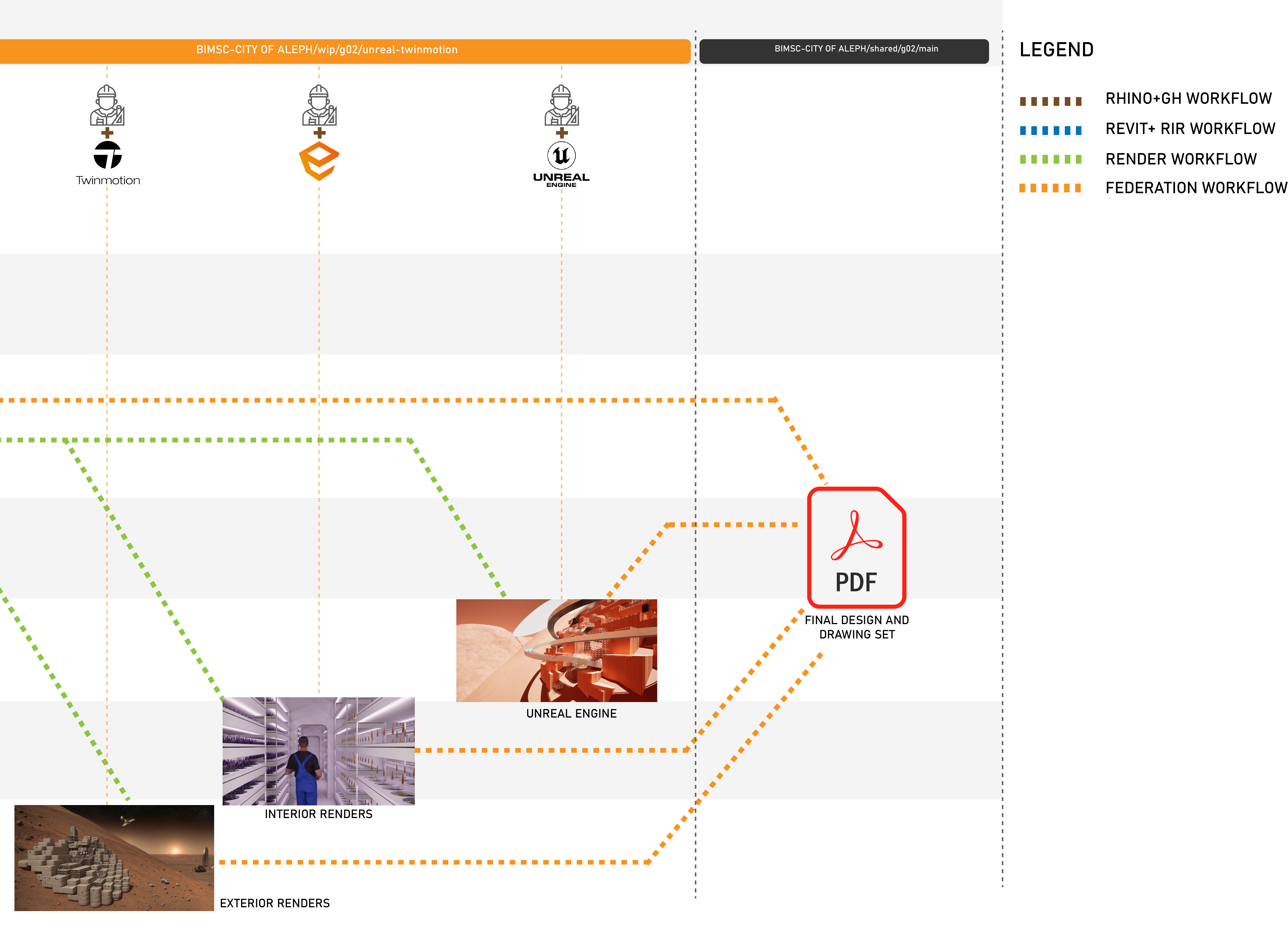
Hybrid System Workflow: Design to Documentation:
Initial Workflow – Identifying Flaws in the workflow:
The initial workflow between the team mostly used Slack for file transfer in the conceptual stage and Speckle during the documentation stage. This added to multiple files and problems concerning version control.
Various stages that would require automation were identified. The first requirement was clustering and classification, which needed automation to reduce manual errors due to the whole back-and-forth process. The second requirement was to deal with different versions of Revit files and federate them into one final Revit model. We adapted to using linked Revit files and Google Drive to overcome any errors in geometry.
Final Workflow:
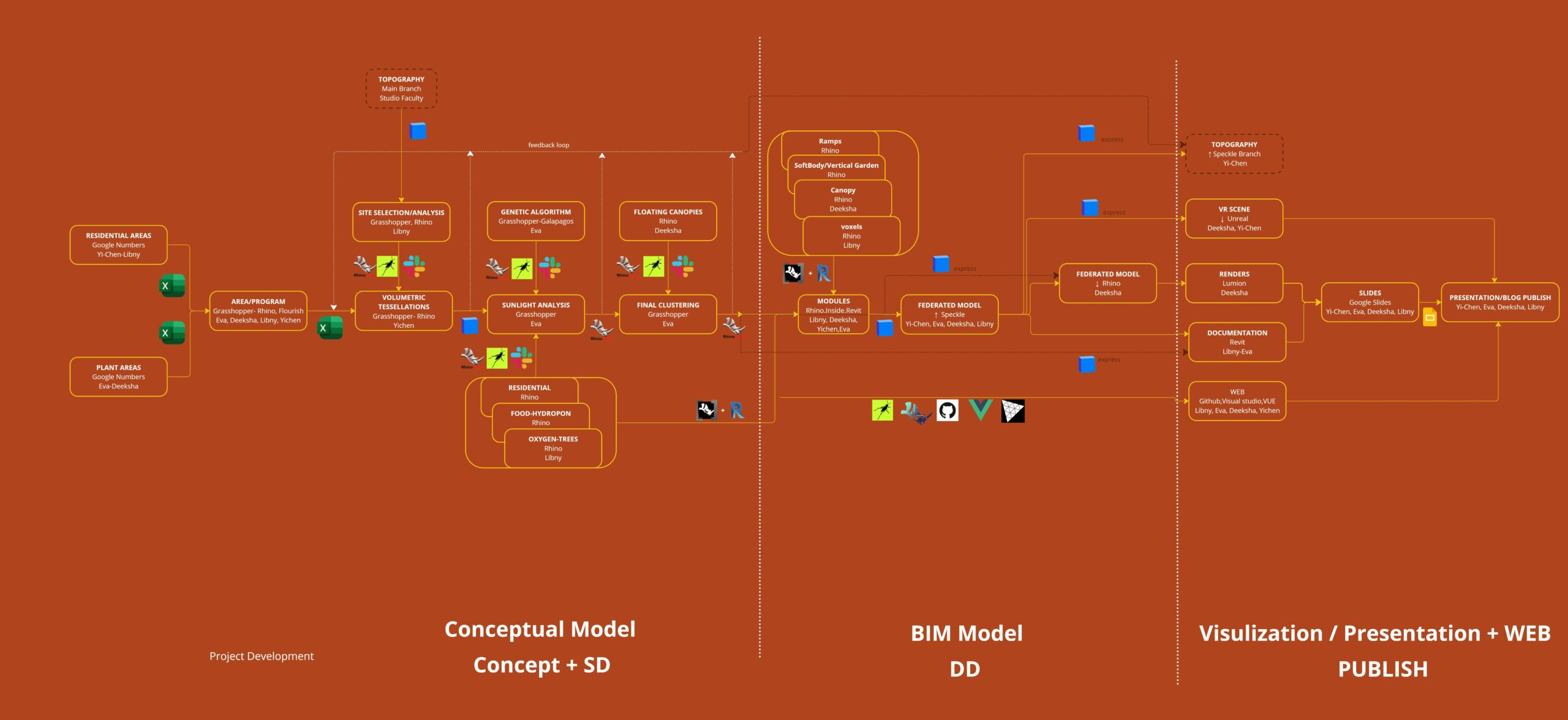
The overall workflow of the project can be divided into three main parts: the computational rhino grasshopper workflow, the Revit workflow, and the post-production workflow.
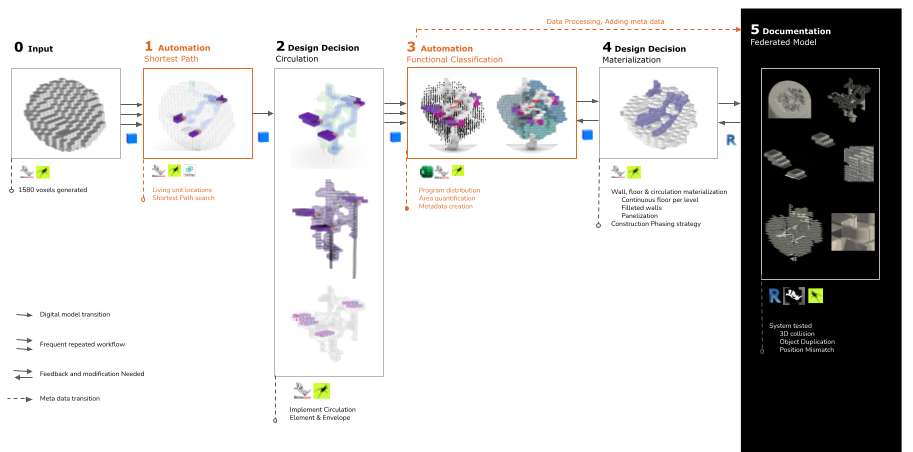
Through this workflow, we identified three possibilities for automation –
1. Site location allocation using Specklepy and Specklebot
2. Clustering and Classification of plant voxels using Specklepy, speckle-bot, and TopologicPy
3. Revit Federated model using Specklepy and Speckle-bot
Automation Possibility 01: Site location allocation using Specklepy and Specklebot and Automation Possibility 02: Clustering and Classification of Plant voxels :
Automation Possibility 03: Revit Federated model using Specklepy and Specklebot
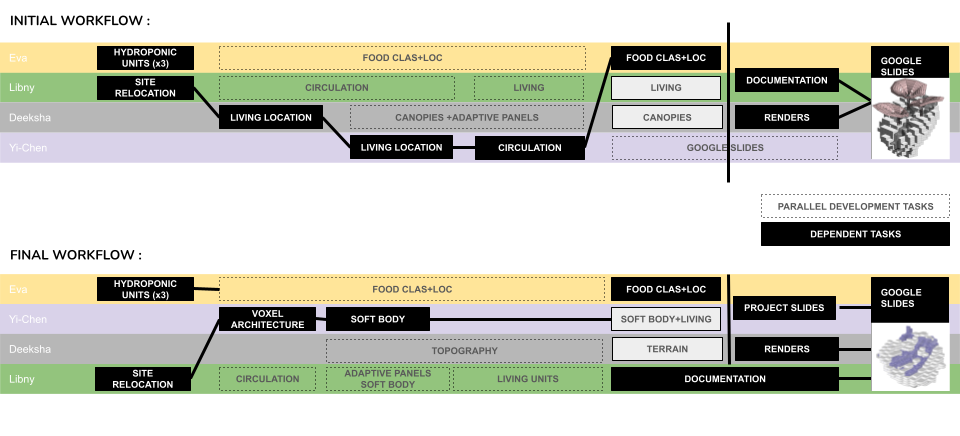
A Comparison of initial vs Final workflow:
The comparison diagram shows our initial and final workflow, how the allocation of work changed according to changes in design and geometry, and how the interdependencies were adapted as the project evolved.
Automation Idea :
A series of desktop and web-cloud-based apps was used for the design. A diagram was made to understand the order of steps followed in terms of the design process along with the execution. This starts with the manual creation of geometry in Rhino-Grasshopper, which will be sent into a Speckle stream by triggering the Speckle bot. This starts a remote server in which we host the app using Fly.io, where we find the shortest path for circulation and vertical farming function using which the walls, shelves, and panels were created subsequently, which will be then sent into Revit.
These final Revit objects were received manually and then federated to obtain a final federated Revit model that can be used for post-production.

