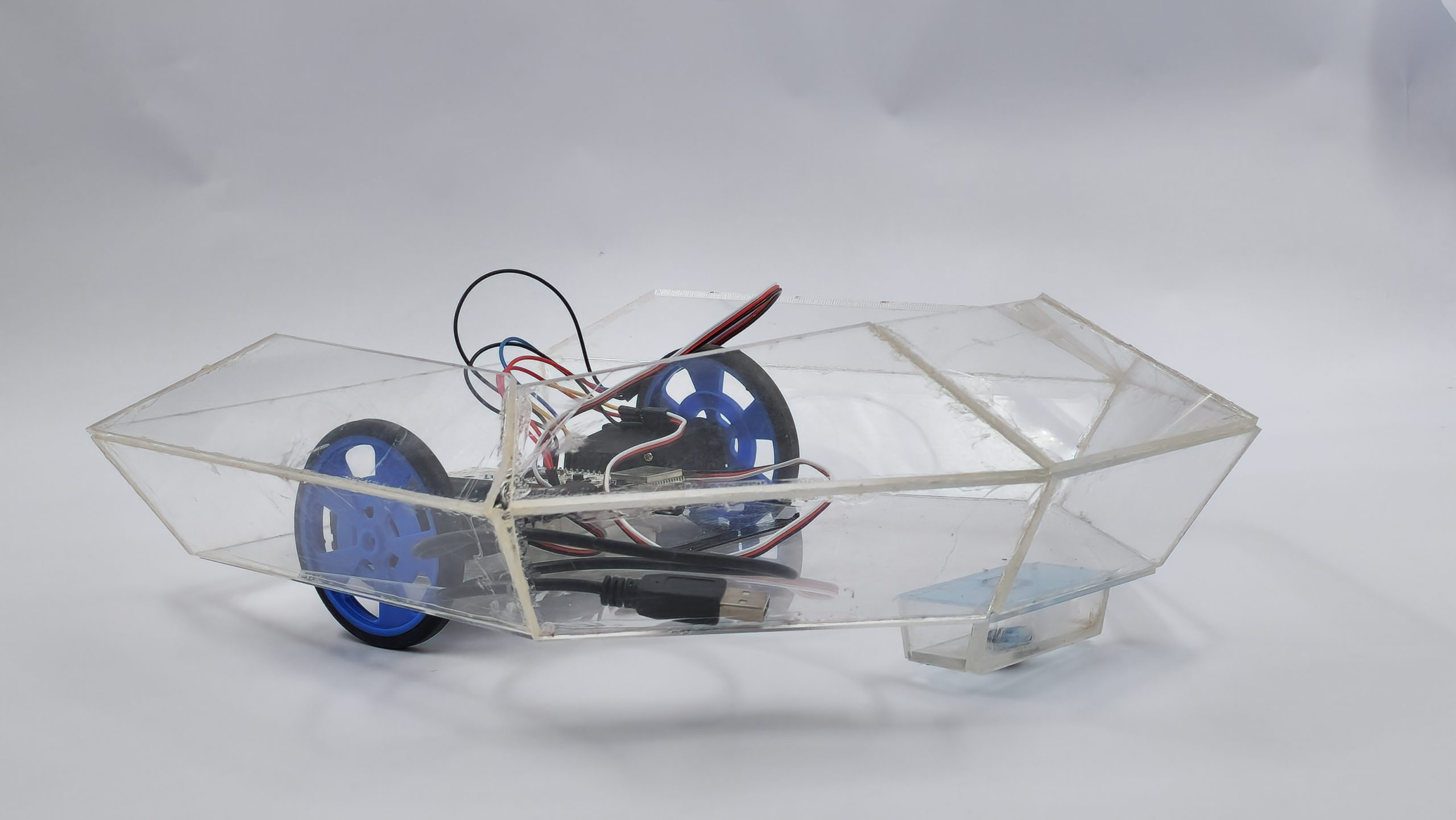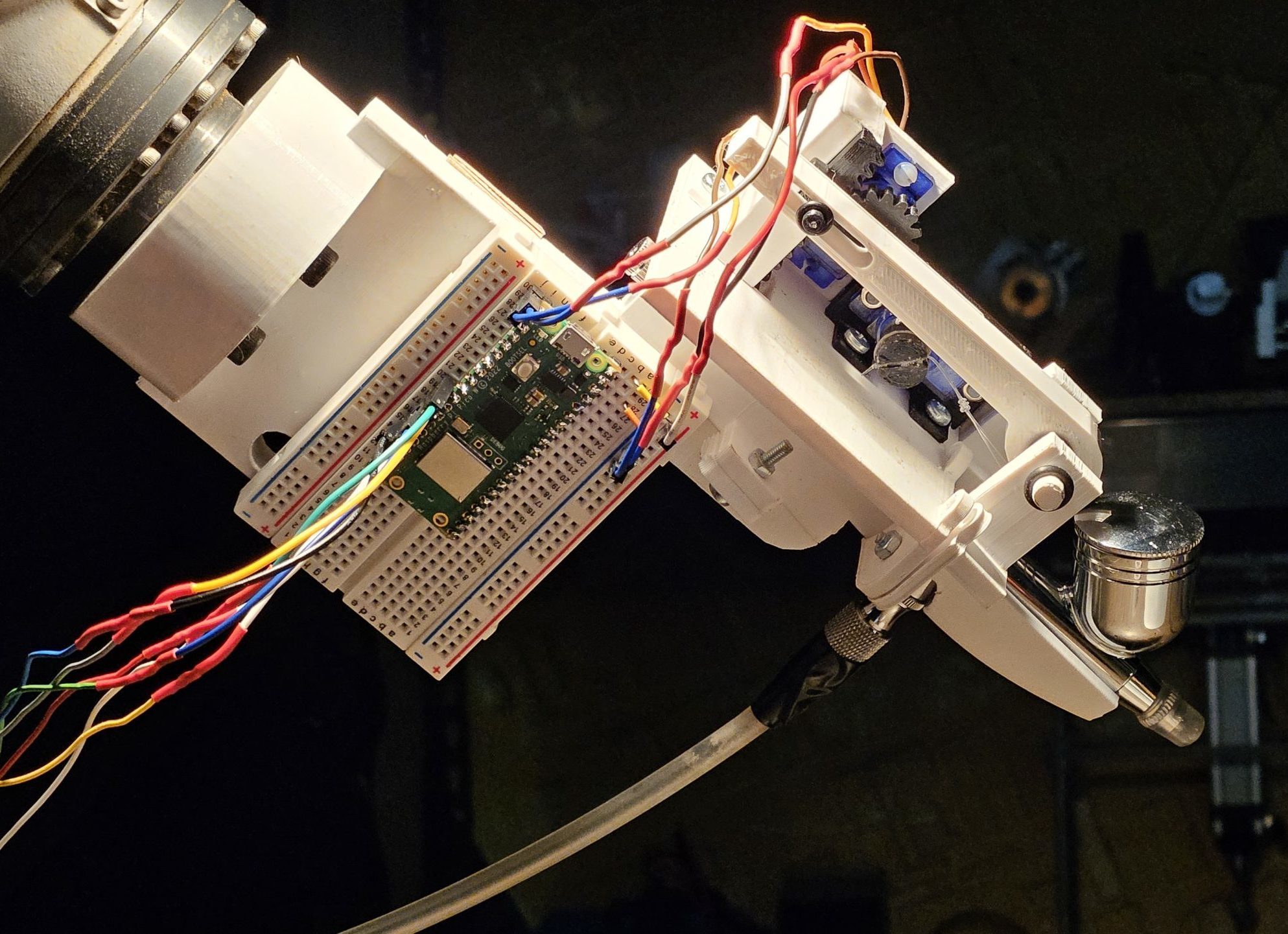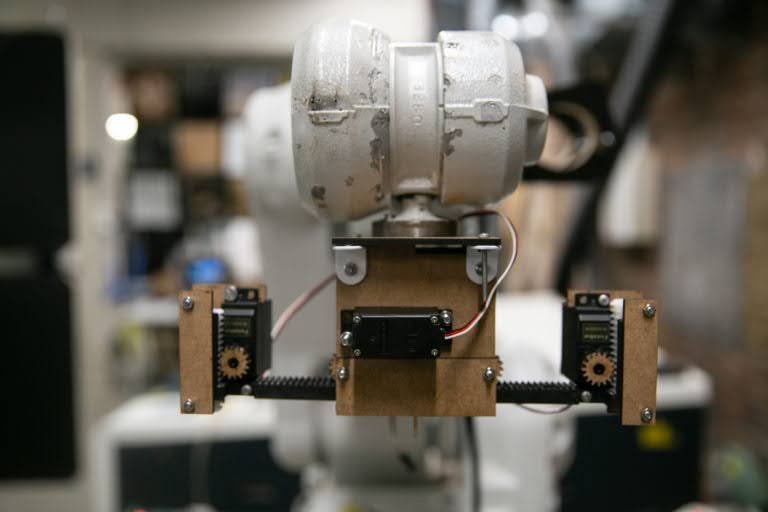
Photo credit: MRAC01 2022/23 Hardware I “Virtuoso Robotico” by students Pit Siebenaler, Yashas Vishwanath and Bipradip Biswas
Description
Open source software, firmware and hardware has unleashed human creativity, sparking significant impacts in the realms of production, prototyping, and innovation. It has empowered individuals to craft IoT devices, drones, robots, and tailor them to specific contexts.
In this seminar, we will explore how recent developments within the open source hardware and software ecosystem have facilitated the rapid growth of sophisticated systems on a tighter budget and with more accessible learning curves. We will also delve into the key distinctions between open source hardware and industrial proprietary software.
Throughout this seminar, students will gain insights into the development of hardware-related projects, encompassing the entire process from research and prototyping to comprehensive documentation. Our primary focus will be on actuators, including various motor types, solenoid valves, pneumatics, relays, electromagnets, and the methods to control them using a microcontroller.
Learning Objectives
The objective of the seminar is to give an overview of the state of the art in robotic actuation, discuss the practical implementation of such actuators, and brainstorm how these actuators and the robotic arms could bring new levels of versatility, agility and efficiency to the production and construction processes.
At course completion students will have learnt about:
- Programming using the C# language
- The use microcontrollers and embedded systems
- To control actuators such as motors, relays, etc.
- To fetch data from sensors such as temperature sensors,
- To communicate between a IRB 140 ABB robot arm and custom-made end effector