
Photo credit: Noumena
Description
Unlock the potential of advanced robotics through our comprehensive workshop that explores the synergy of key technologies. Delving into the heart of robotic intelligence, this program revolves around harnessing the capabilities of ROS and OpenCV for seamless navigation and precision image collection. Explore the fascinating world of 3D modeling using Agisoft, transforming captured images into intricate and realistic three-dimensional representations.
Take your skills to the next level by integrating Deep Learning techniques, empowering you to tackle complex image processing tasks with confidence. Gain insights into enhancing robotic vision and decision-making processes through state-of-the-art Deep Learning methodologies.
Beyond the algorithms, we invite you to explore the intersection of robotics and the online world. Learn the essentials of web visualization, opening doors to presenting and interacting with your robotic creations in a dynamic online environment. Discover the art of showcasing your robotics projects on the web, fostering collaboration and communication.
This workshop provides a balanced blend of theory and hands-on exercises in ROS, OpenCV, Agisoft Metashape, Deep Learning and web visualization.
Learning Objectives
The workshop aims to achieve the following learning objectives:
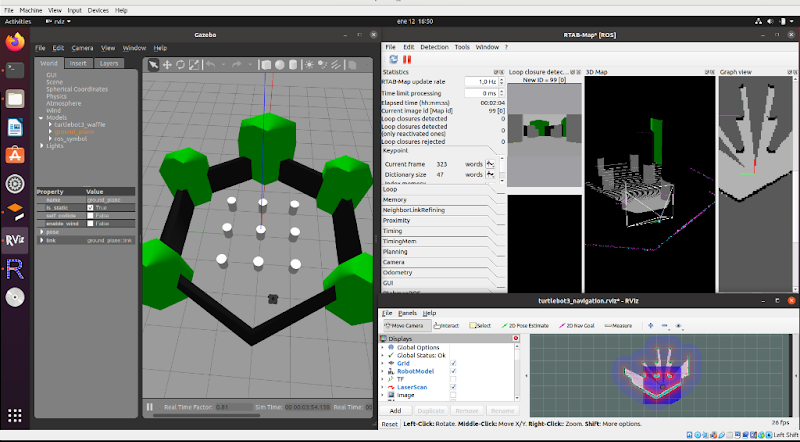
- Gain a comprehensive understanding of the ROS framework, exploring its diverse possibilities, and learning to program robots. Participants will transition seamlessly from a simulation environment to real-world applications.
- Develop the capability to create projects in ROS using RDS (ROS Development Studio) and to use Docker for ROS simulations.
- Comprehend the fundamental concepts of computer vision in the context of robotics.
- Students will learn to program basic exercises using OpenCV and Python for image processing.
- Apply ROS and OpenCV knowledge to navigate robots in a real-world environment, analyzing space through robot cameras and responding accordingly.
- Establish a systematic workflow for extracting and managing data, facilitating the organization and communication of pertinent point cloud information.
- Work proficiently with Metashape Agisoft software, mastering the technique of photogrammetry to create intricate 3D models.
- Gain insight into various 3D modeling techniques beyond Agisoft.
- Receive an introduction to Deep Learning models, empowering participants to train their own models for application with 3D models
- Learn how to visualize the constructed point cloud in a custom web interface, enhancing clarity and accessibility.
This workshop is designed to equip participants with a basic skill set in ROS, OpenCV, Agisoft, and Deep Learning, fostering the ability to seamlessly integrate these technologies into real-world applications.