Robotics for Ecological Buildings
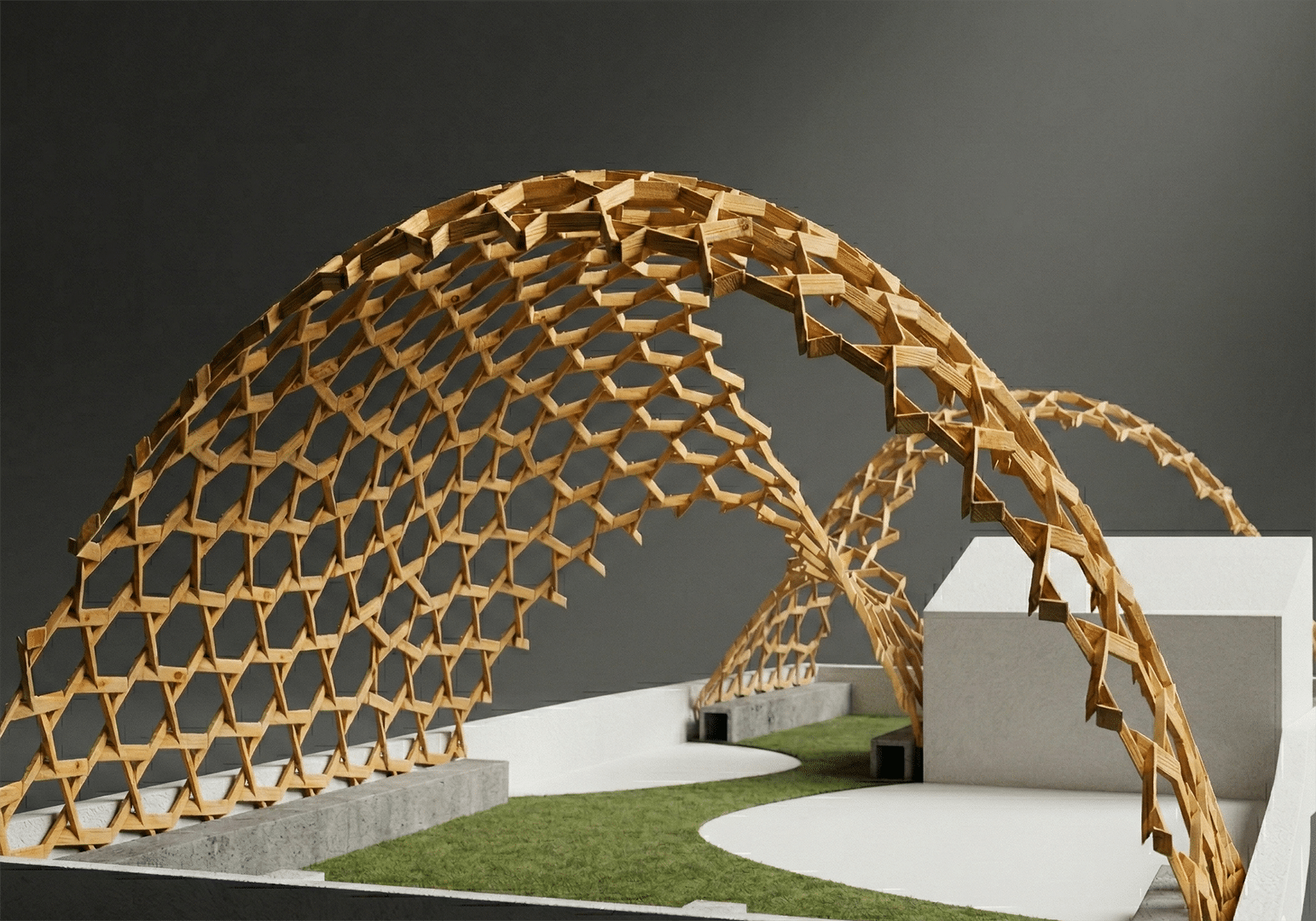
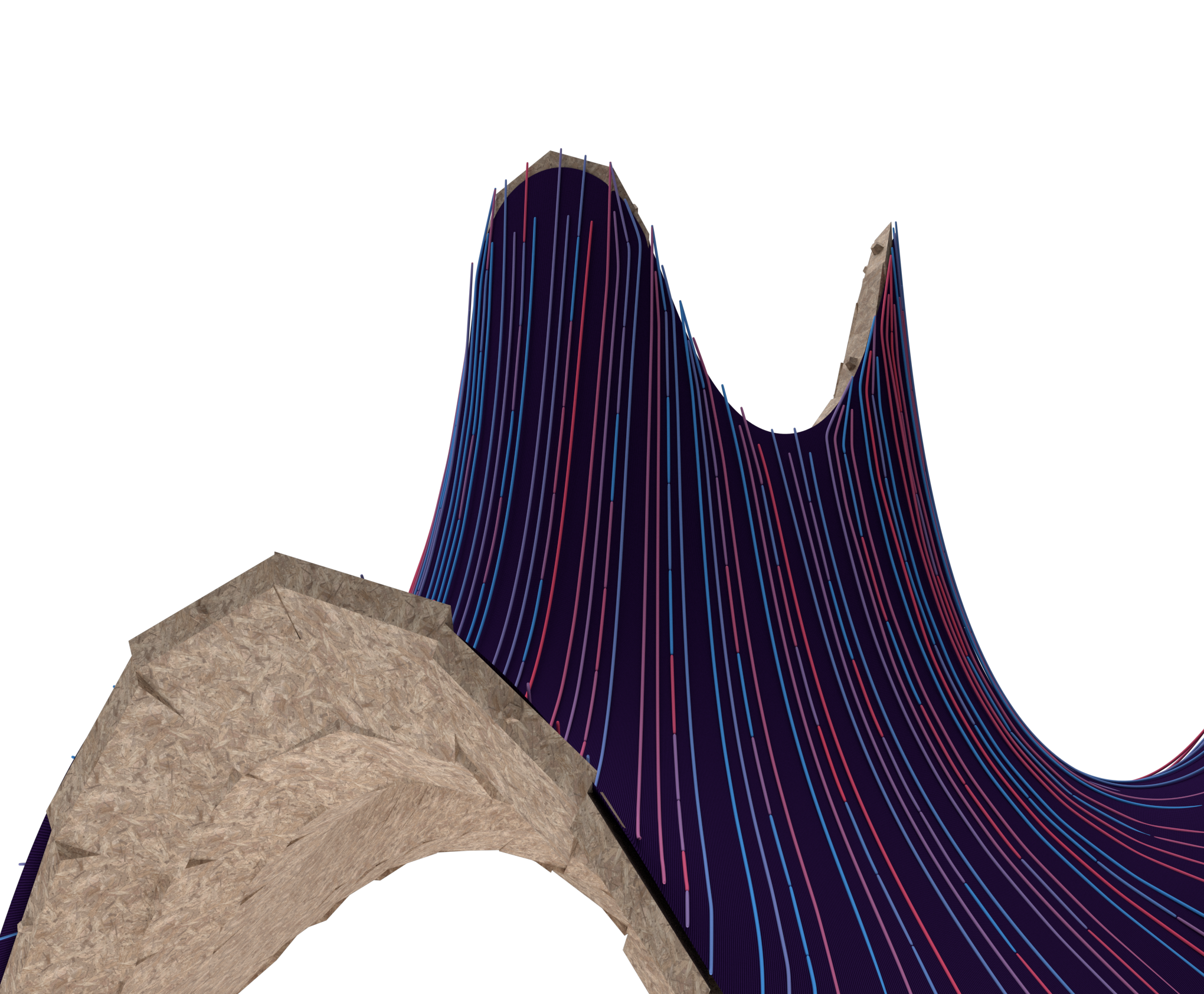
The Living Fibers MAA/MRAC, Studio Term 2, 2025/2026 Group 1: Brooklyn Edsall, Elias El asmar, Leonard elias Böker, Nikolaos Kalaitzidis, Nisanth Anil Menon Abstract:This project challenges the hyper-standardization of modern construction by investigating the architectural potential of raw, locally sourced Catalan wool. Our research elevates wool from a passive insulation material into an active, rigid, … Read more