MULTIPLE ROTATIONS END-EFFECTOR

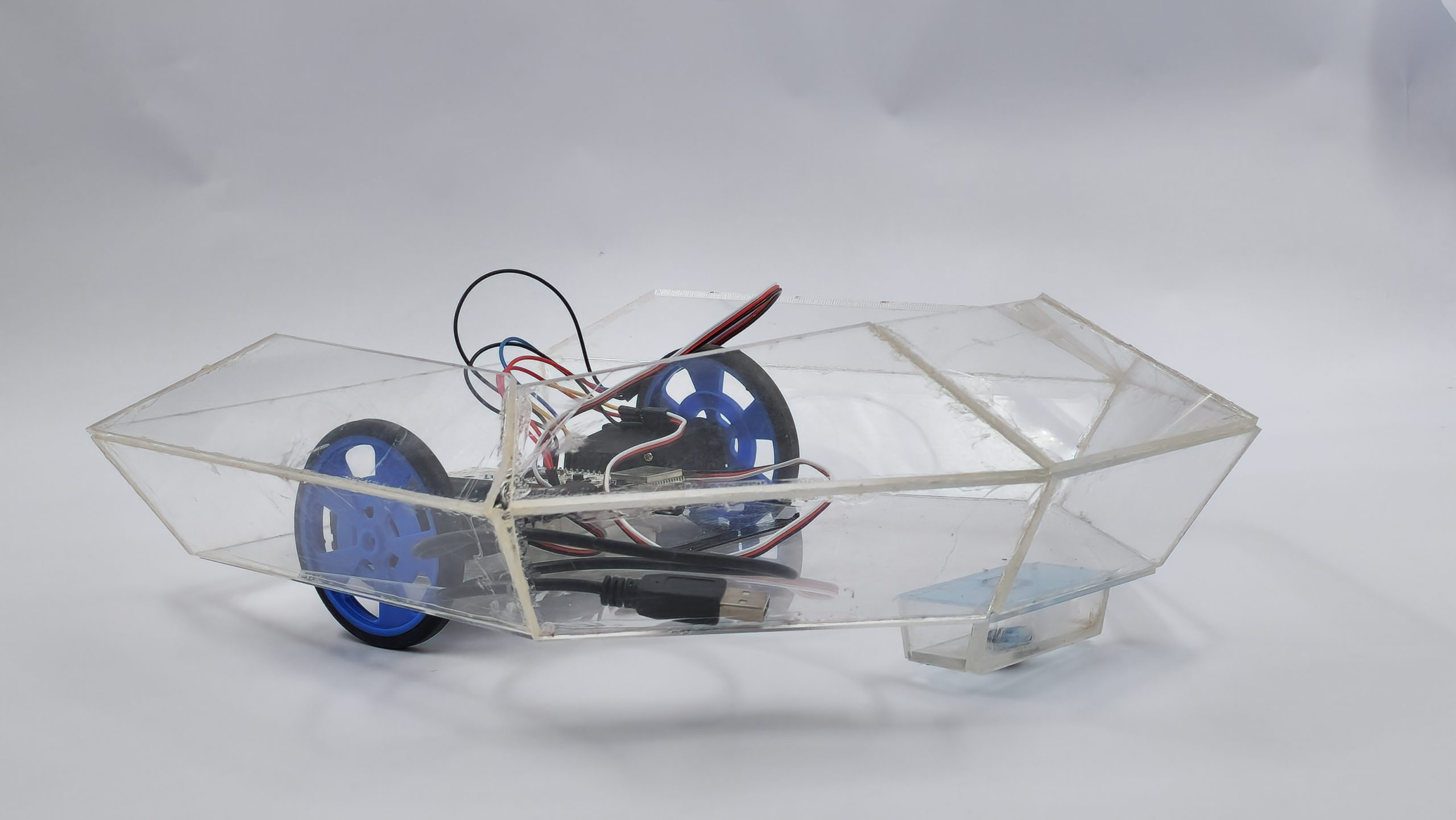
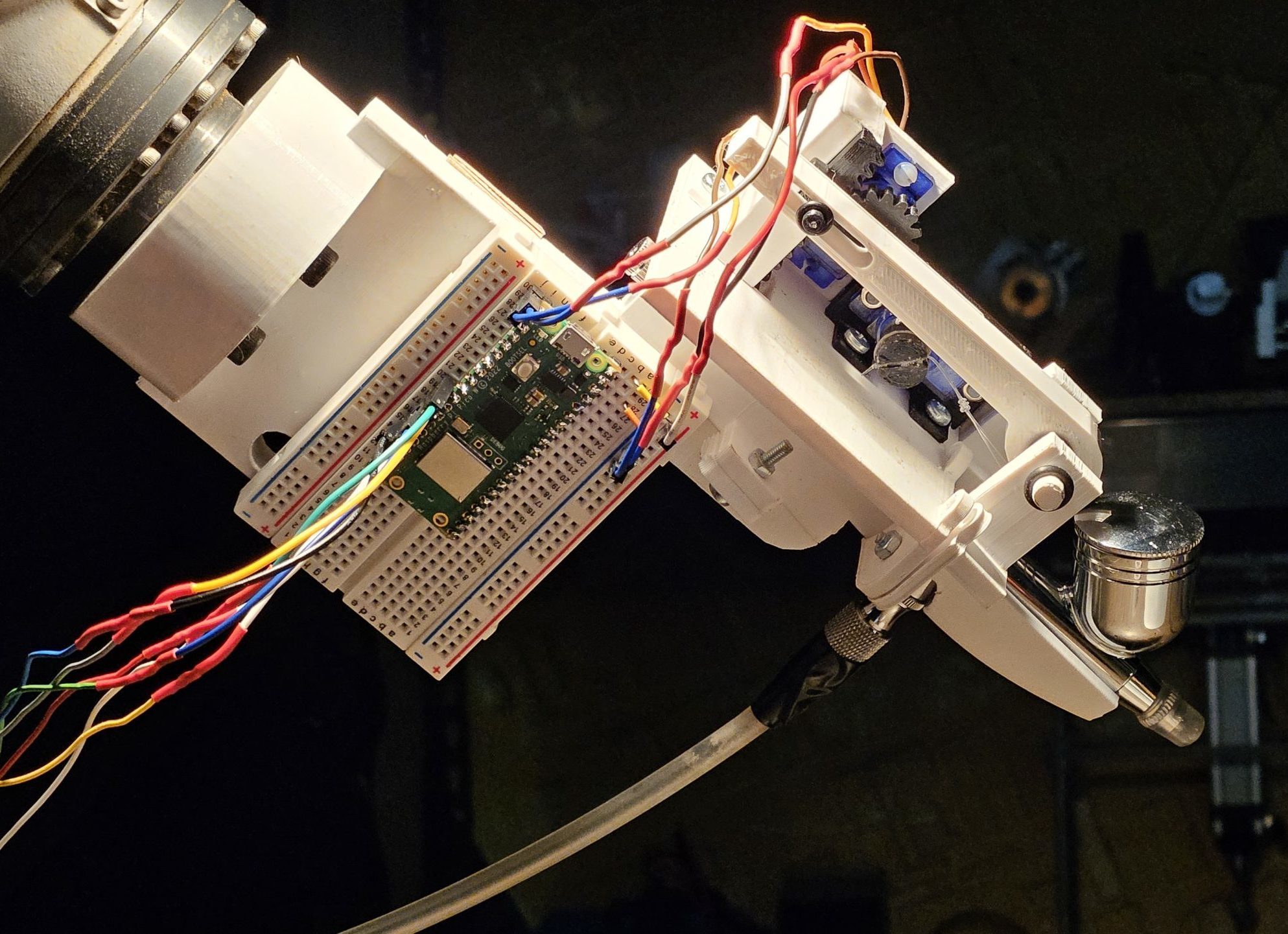
PROJESCT INTRODUCTION This project is a robot end-effector solution that can carry multiple objects and rotate them at different angles and displacements during a single pick and place motion. The solution solves the efficiency problem of current robotics applications in architectural masonry by outputting the robot’s spatial motion through a grasshopper and picking and placing … Read more