Workshop 3.1 – Robot – Human Collaboration in Metal Fabrication
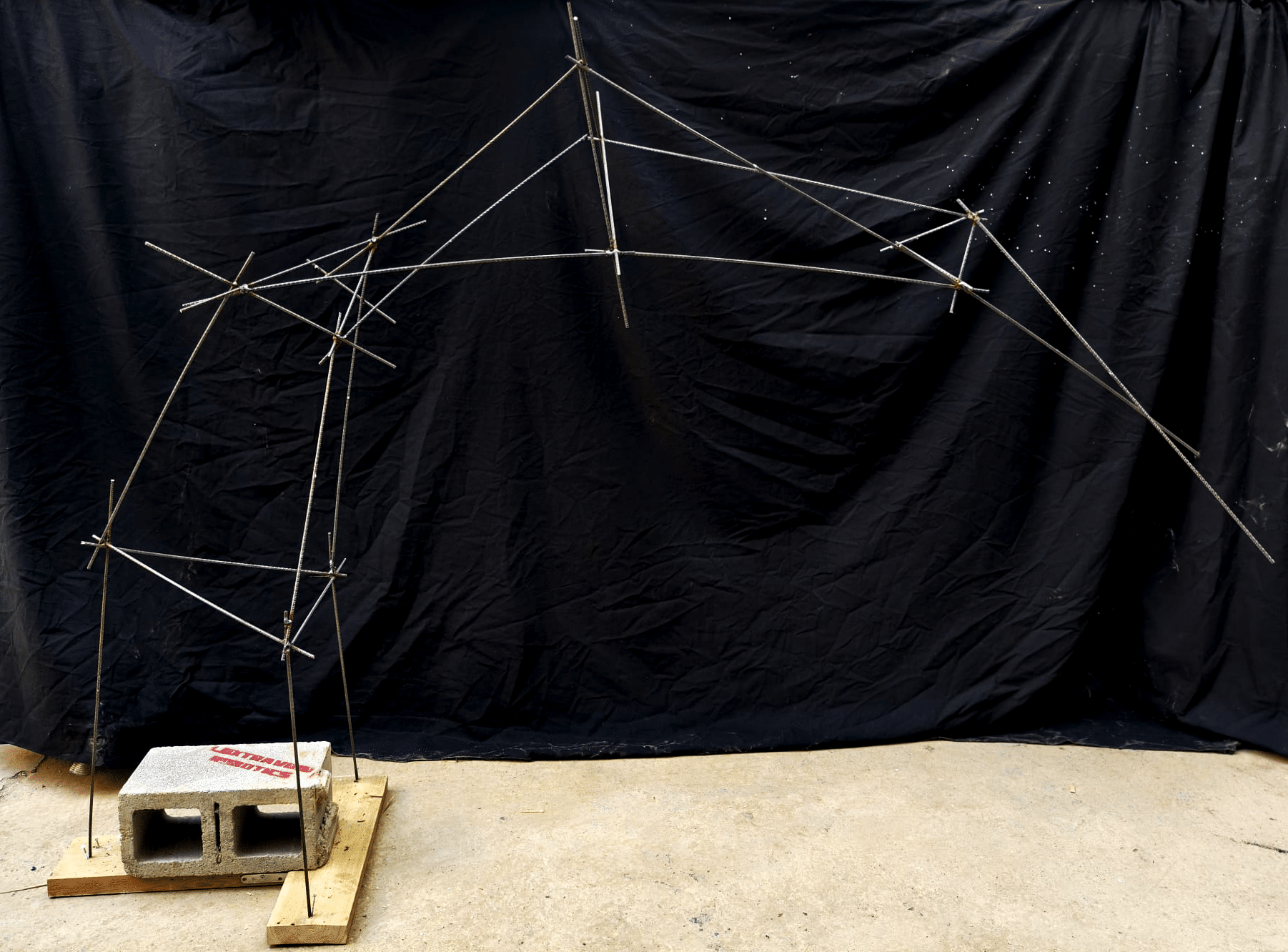
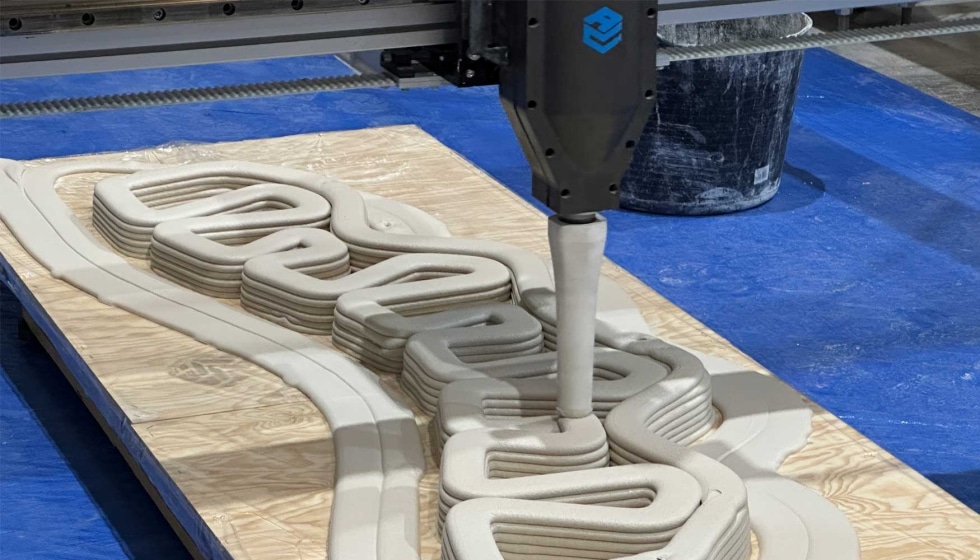
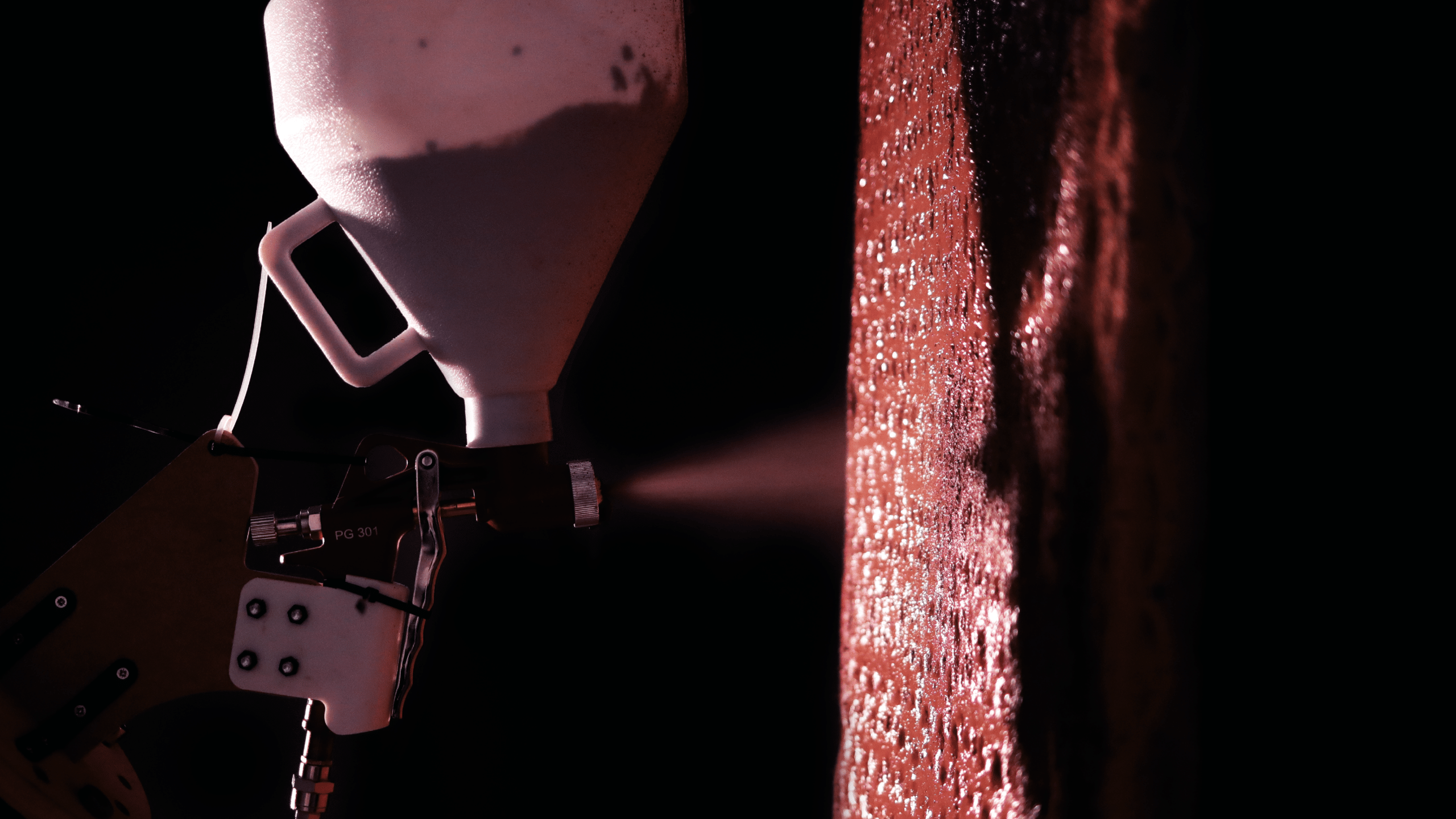
Faculty: Nacho Monereo & Prottay Roy ChowdhuryGuest Artist: Maria Mallo The project focused on creating a dynamic feedback loop between digital design, robotic positioning, and human craftsmanship. Instead of treating the robot as a fully autonomous machine, the workflow emphasized continuous interaction and mutual dependency between human and machine during fabrication. The installation was fabricated … Read more