Motion Control of Robotic Arms Through Grasshopper and Sketching Devices
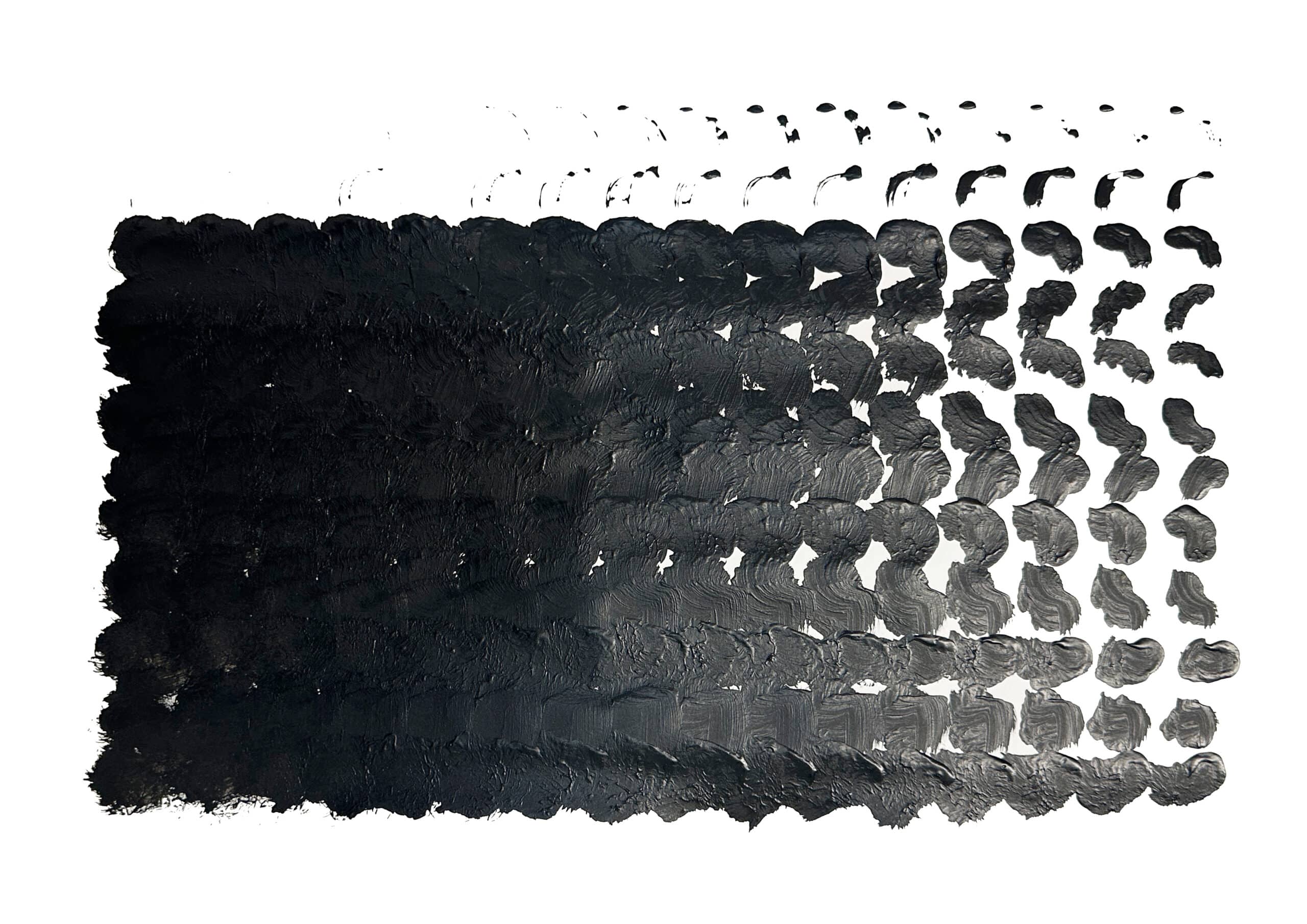
Introduction This project orients around robotic drawing system that uses a brush to create adaptive visual results. It focuses on turning basic painting actions; such as dipping, stroking, and rotating—into clear, programmable steps. By combining digital design tools with robotic movement, the work explores how changes in brush angle, paint material, and surface conditions shape … Read more