Context Aware Robotics AM
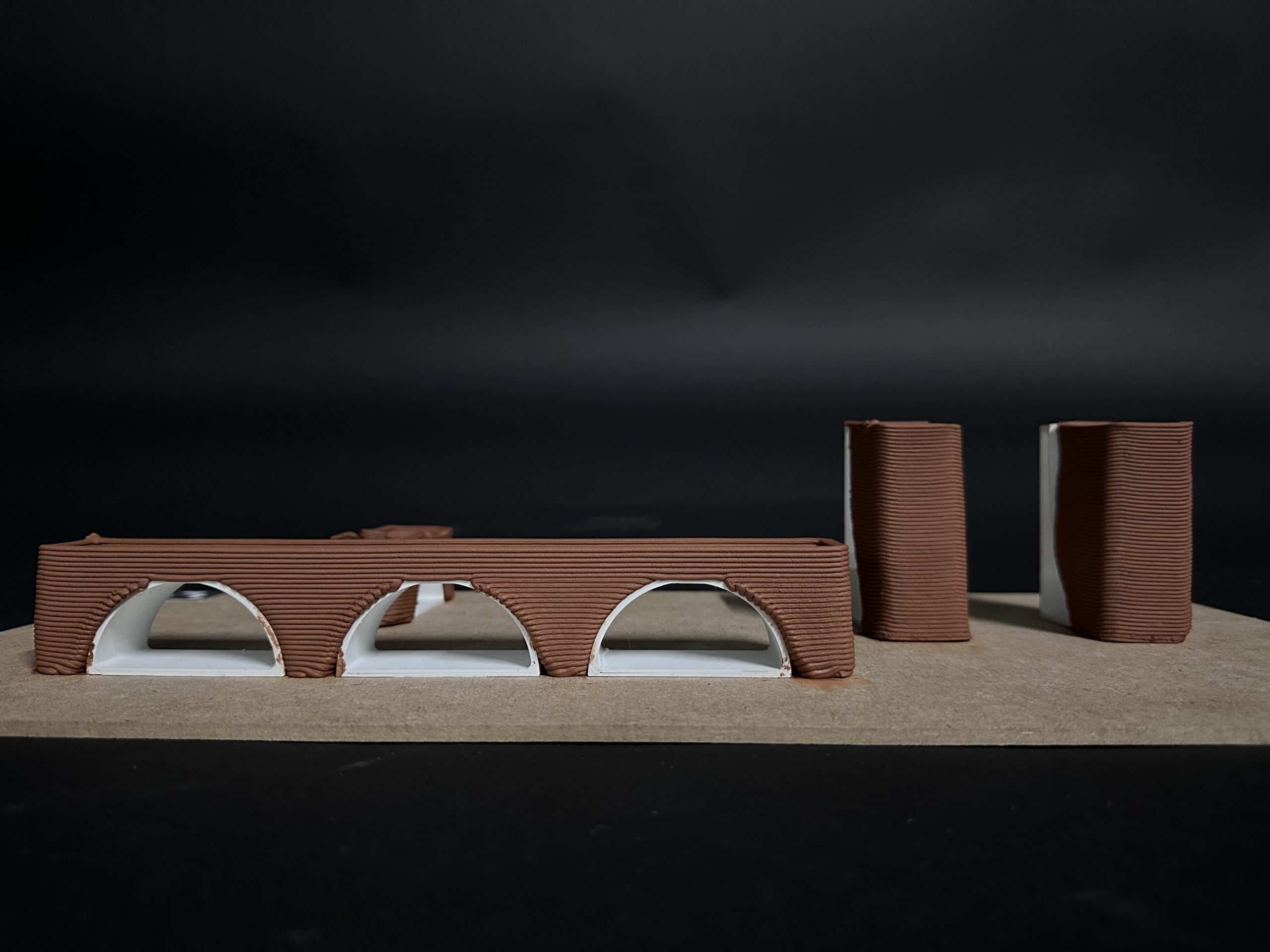
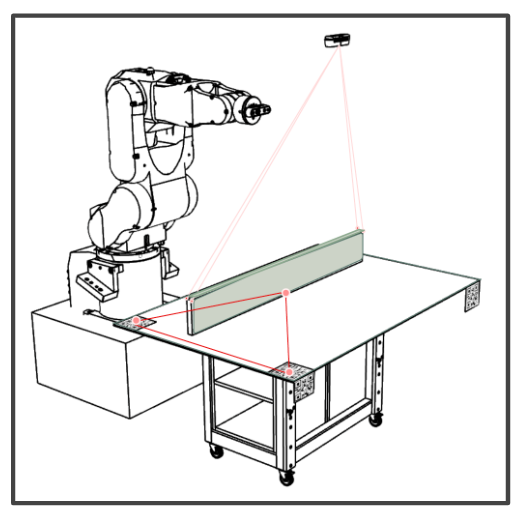
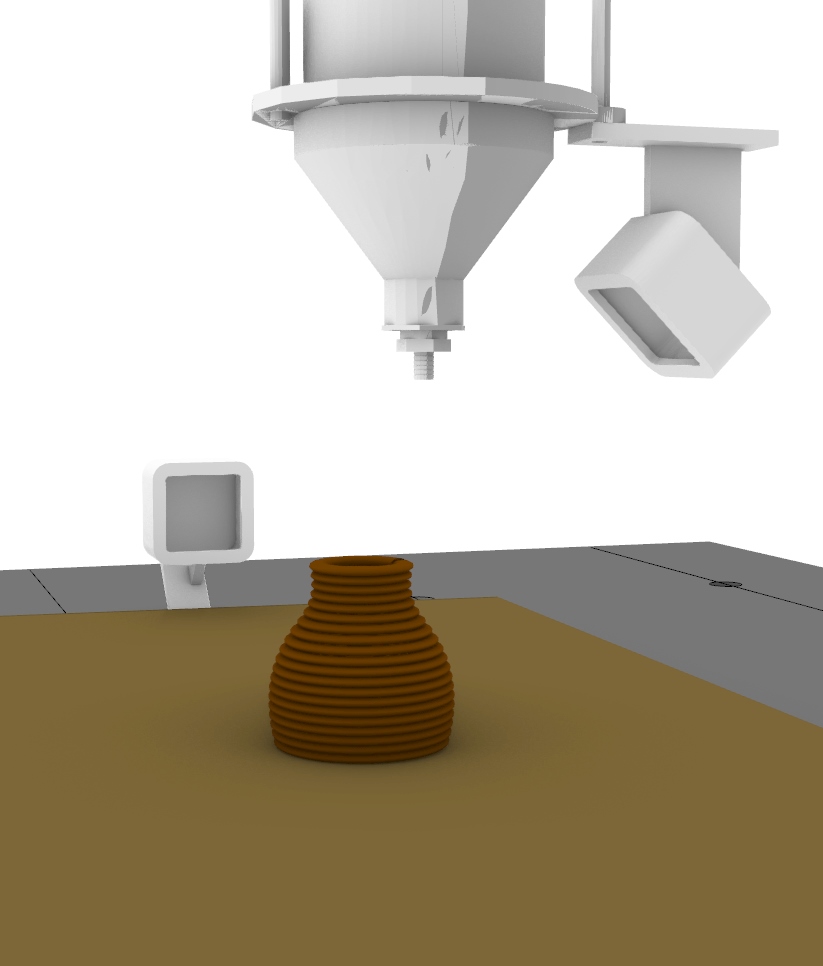
Context This project seeks for adapting the 3D printing process to known geometries used as supports or external elements as formwork, located in the physical space to save the costs of material and time to produce non reusable ones. These elements are detected through Computer Vision to update the toolpath on the digital model. There … Read more