
नमस्ते – مرحبًا – OLÁ – HOLÁ
AIM
Our aim is to make Human Robot Collaboration accessible to a variety of users via different languages by developing a speech to toolpath interface.
RELEVANCE
- HOW CAN WE IMPROVE THE ROBOTIC COLLABORATION INTEGRATING DIFFERENT LANGUAGES TO TRIGGER DIFFERENT ROBOTIC ACTIONS?
- INTEGRATE DIFFERENT LANGUAGES
- TRIGGER DIFFERENT ACTIONS PARALLEL TO ROBOTIC GOAL
- VISUAL FEEDBACK FROM PATH AND CONTINUITY OF GOAL
METHOD
Workflow
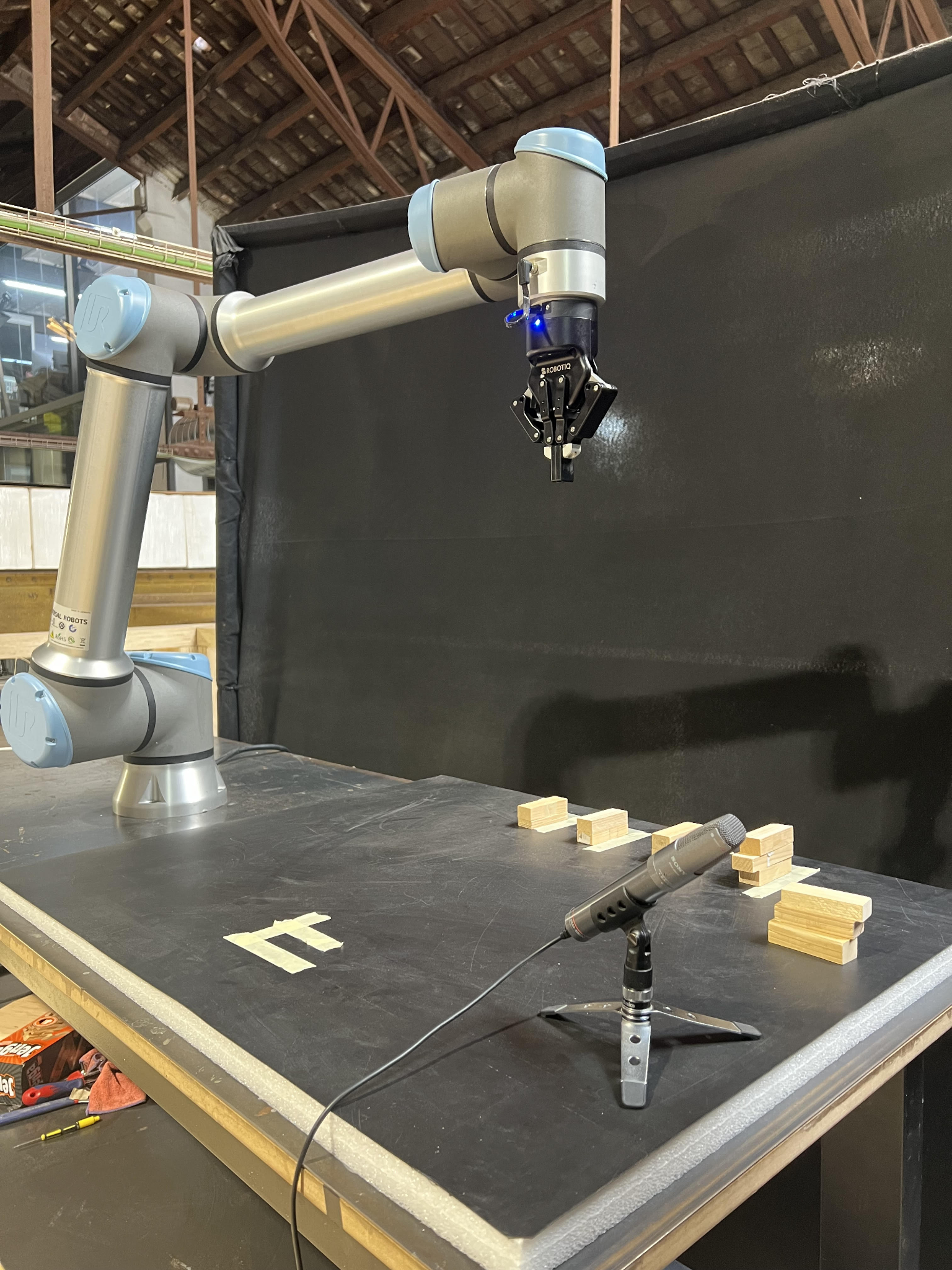
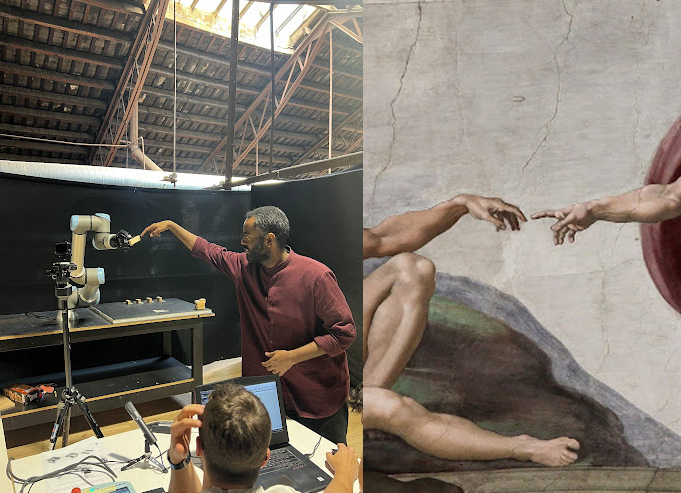
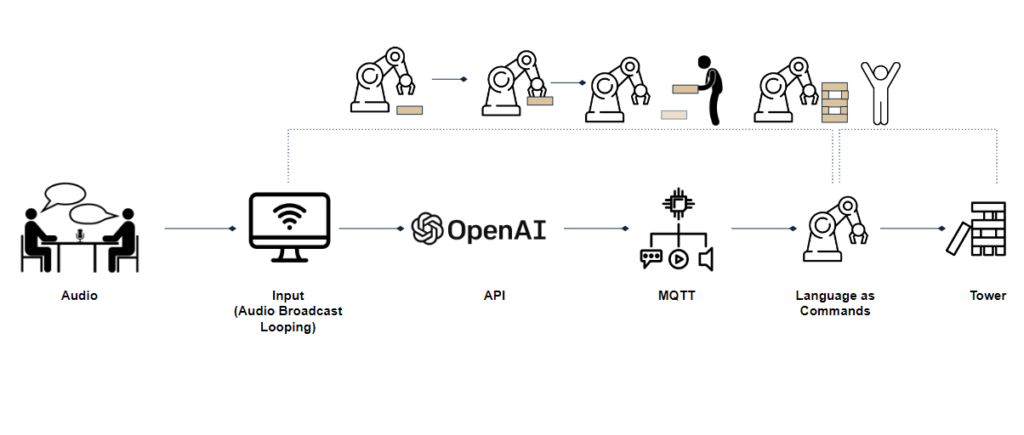
As the participant enters the room, they are greeted by a robot with a friendly waving motion. The participant can speak to the robot via a microphone in their native language. Engaging in a collaborative activity, the participant and the robot work together to build a small tower using the wooden pieces on the table. Throughout this interaction, the robot responds to the participant’s language, with certain languages triggering specific motions, enhancing the collaborative experience.

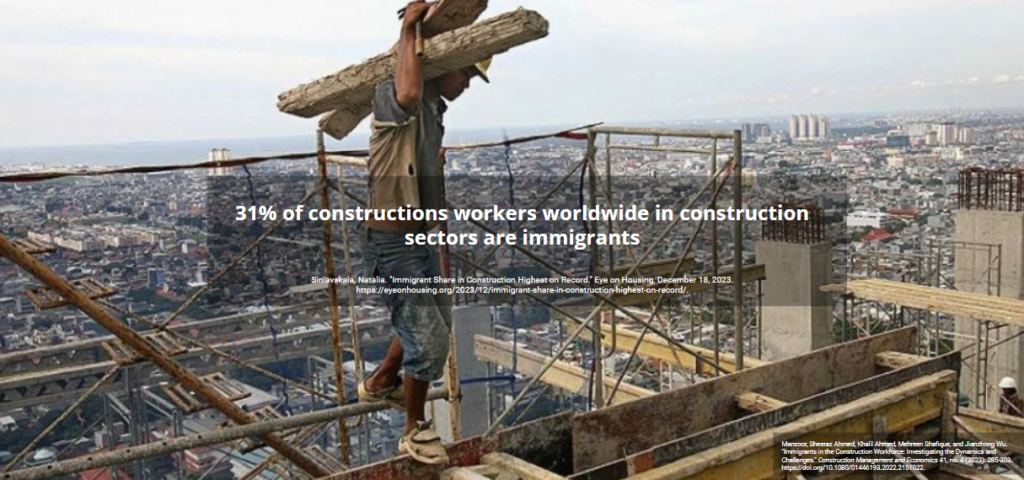
This voice-triggered interface holds significant potential for the construction industry and other robotic fields, making human-robot collaboration more accessible and efficient. By removing language barriers, this technology enables seamless interaction, allowing diverse teams to work together effortlessly. The ability to communicate in one’s mother tongue ensures that language is no longer an obstacle, fostering a more inclusive and productive environment in industries reliant on robotics.
FURTHER STEPS
- BEHAVIOUR TO INITIATE MOVEMENT “HEY ALEXA”
- COMBINE ALL TRIGGERS TOGETHER WITHOUT GLITCHING OR BREAKING THE TOOLPATH
- INTEGRATE BETTER TIMING WITH API DATA TO GRASSHOPPER
