

This studio led by Edouard Cabay and Pit Siebenaler is an ongoing research project into how robotics and advanced architectural methodologies can be used in partnership to the vernacular construction techniques of Catalonia to produce viable modern typologies for today’s industry. The studio is ecologically minded with an emphasis on local craft, traditional techniques but also technological innovation.
As the outcome of the project was for an architectural intervention in the new IAAC building we began by thinking how the existing building could be edified. Reviewing the top floor of the building, despite being exposed to the sky it has few windows and crowns the building a dark unattractive space.

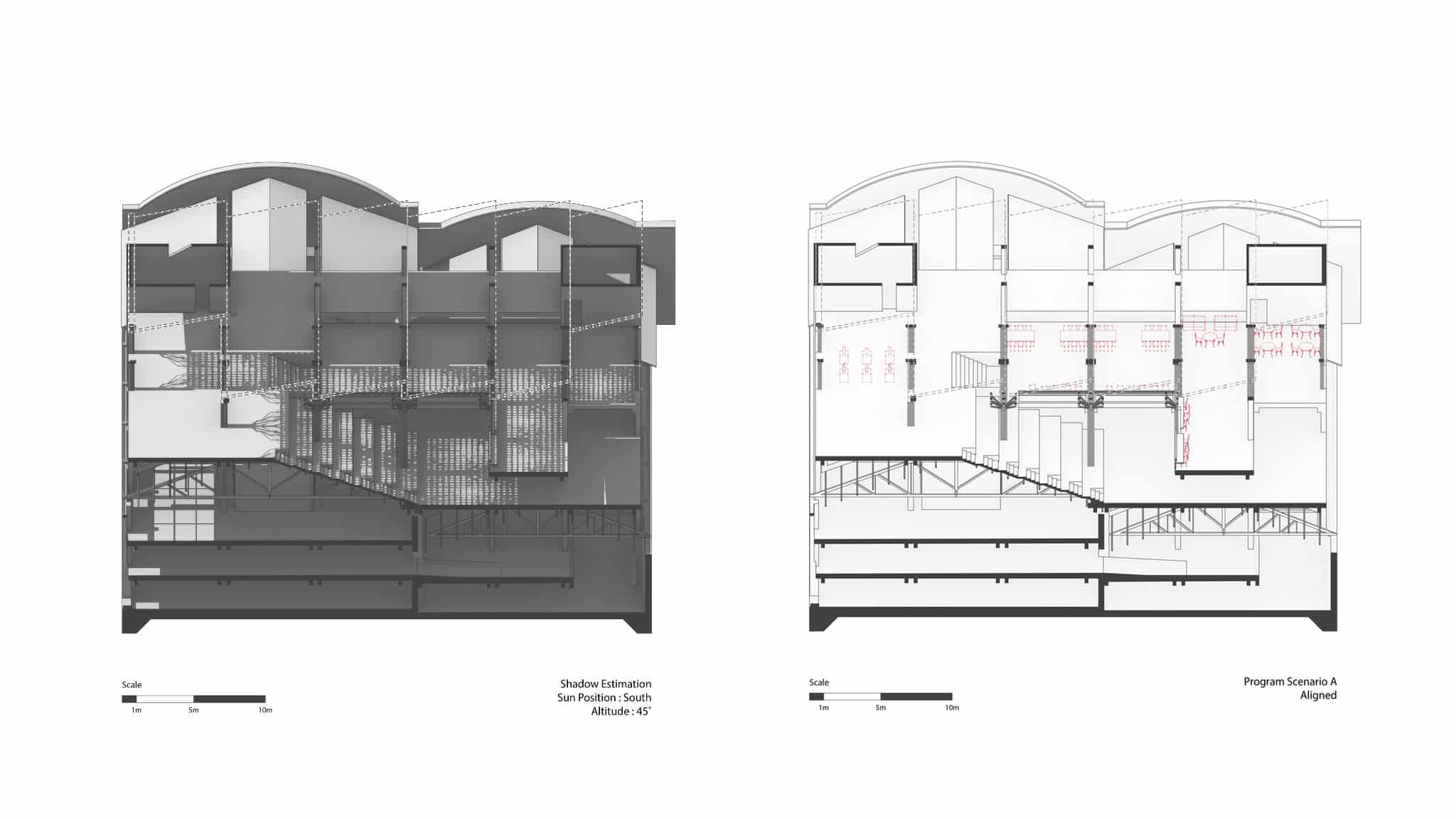
Wanting to bring people into the space we wanted to explore how light be used to enhance the space whilst not blazing the Spanish sun and heat into floorspace. Taking inspiration from several references for this could be achieved we began to think about a bifurcated column system.
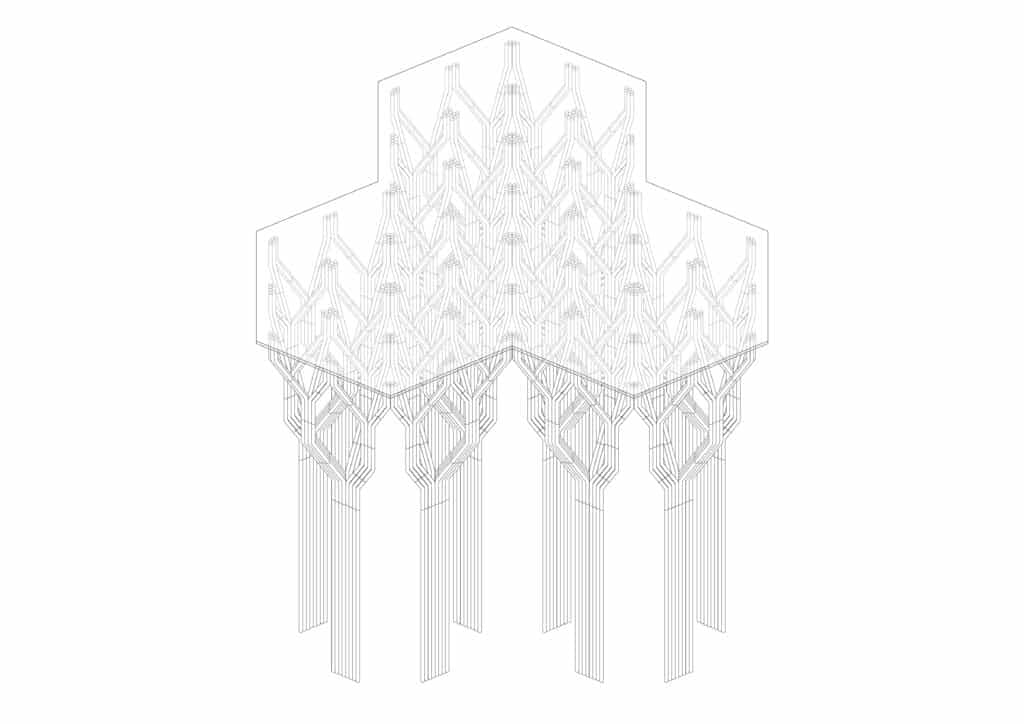
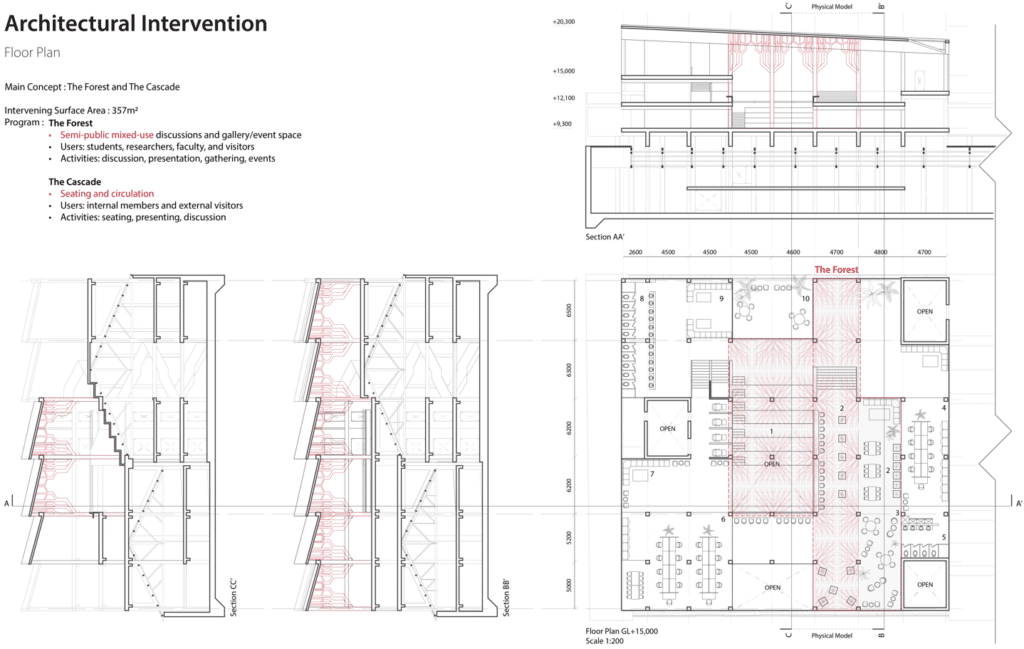
A bifurcated column structure crowning the new IAAC building. “The Forest”; A new archive/ meeting area for students under a dappled lit glass roof and “The Cascade”; a bleacher step circulation intervention connecting the new space directly also sat under a colonnade.
Material Investigation
Choosing a vernacular material for this we began to look at reed/ Canya, it has been used since the medieval ages in Catalonia for roof thatching near the Ebro Delta but also for musical instruments such as the Gralla. The traditional instrument used for signalling in the tradition of Castells or human towers.
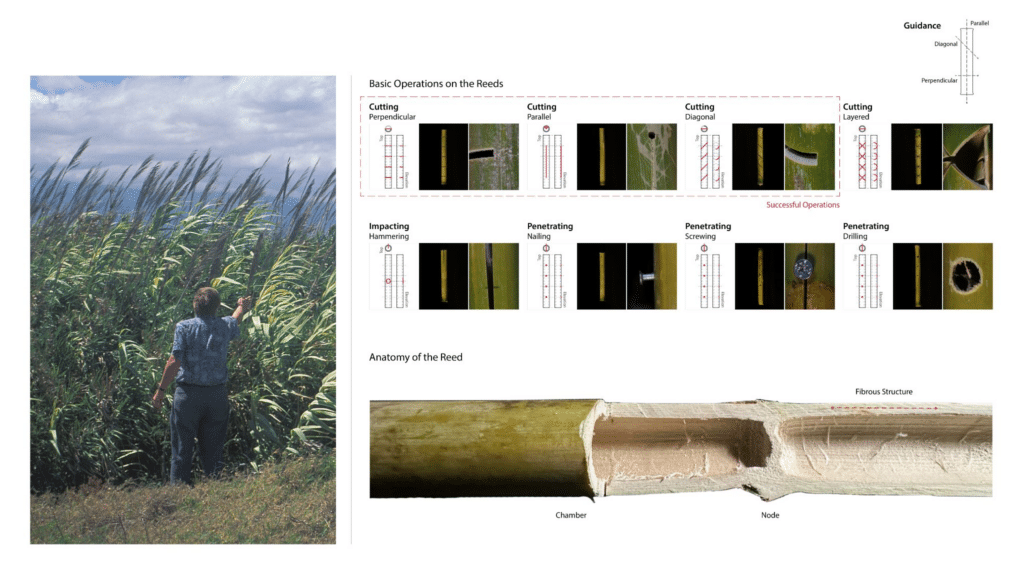
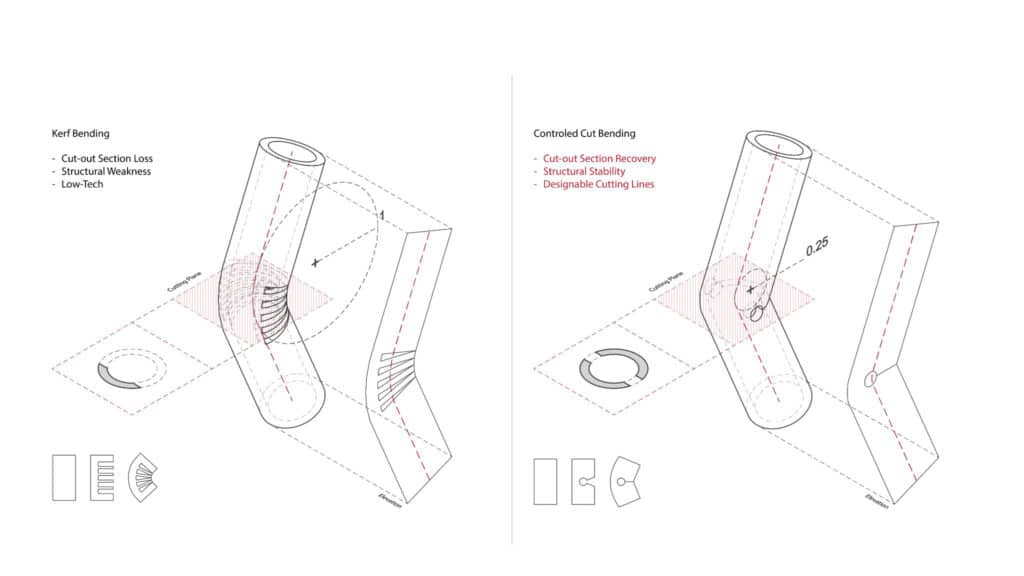
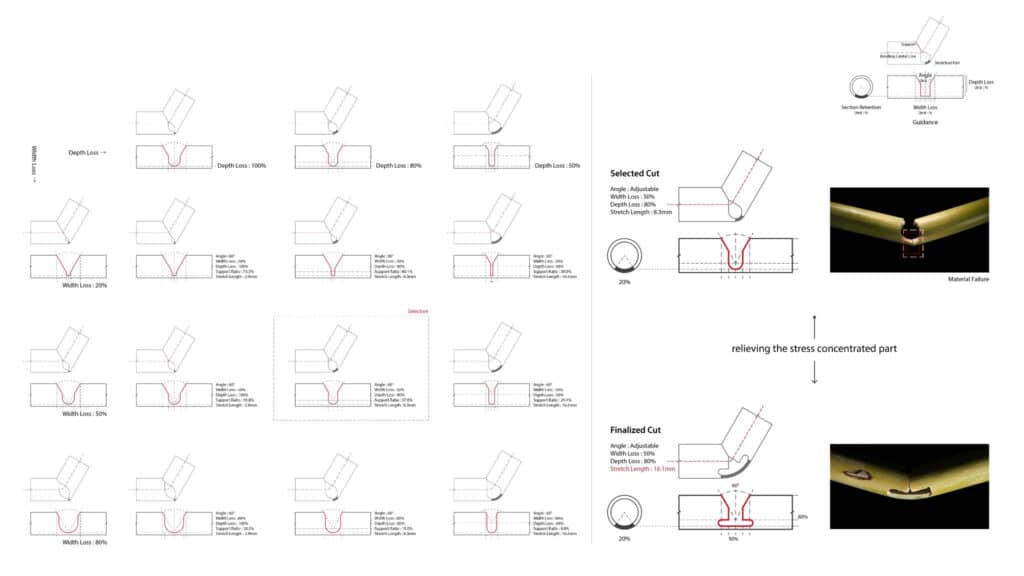
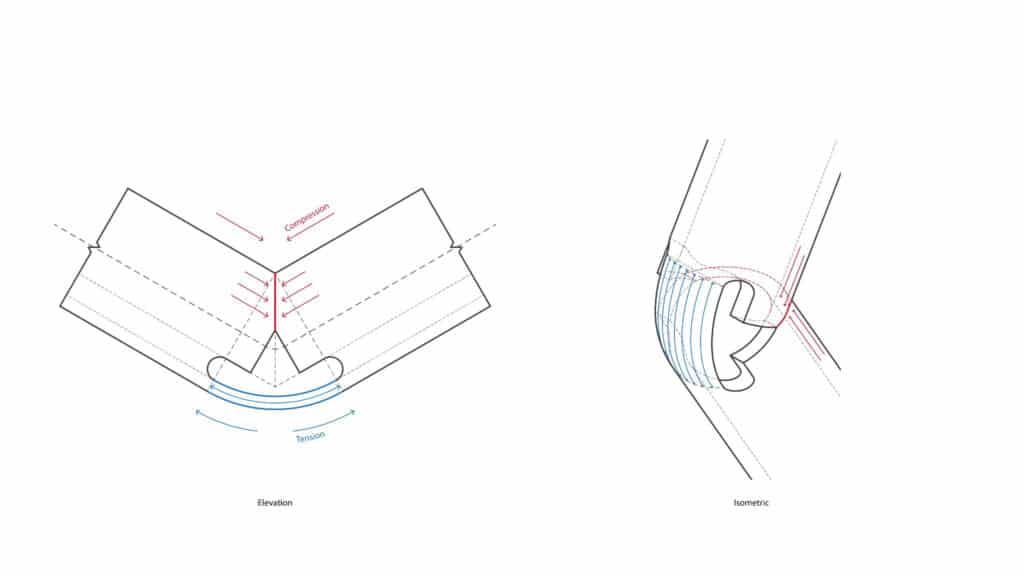
Experimenting with the material, we found that when cutting the material in a kerfing style we were able to bend it and rechange the structure from a tensile force-bearing to one which could take compressive loads too. The cut was developed into a t-shaped keyhole cut which allowed us great flexibility, control of the bending angle and a subtraction of material whilst retaining a great enough force-bearing quantity.
Prototype Development
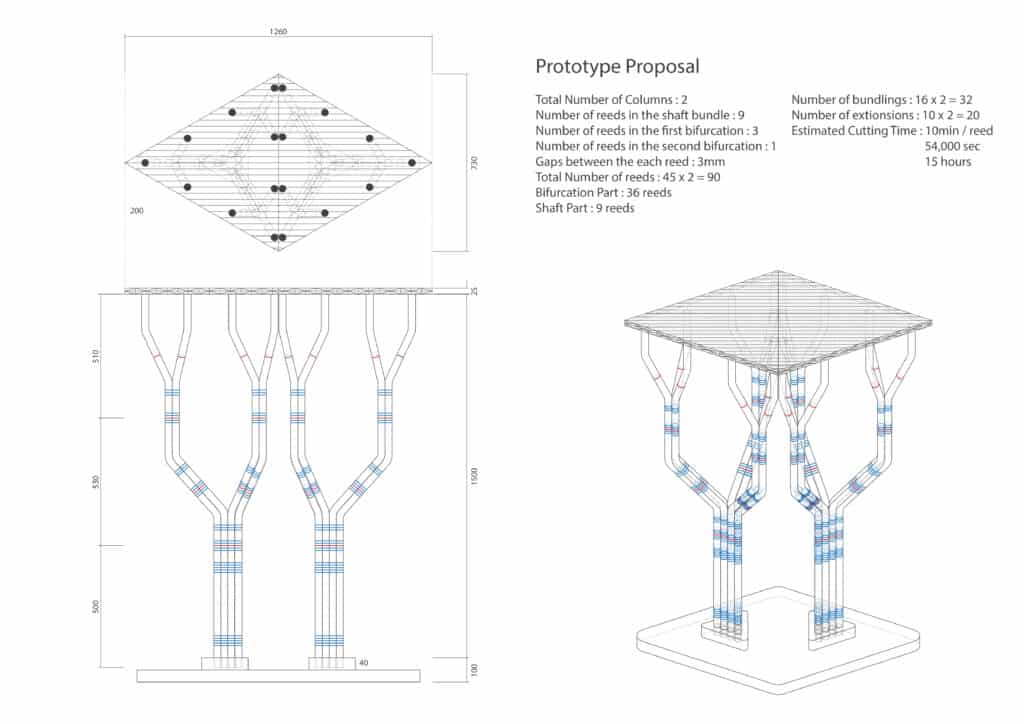
Based on the material experiments, we developed a bifurcated structural prototype. The geometry, dimensions, and assembly logic were refined to balance fabrication feasibility with structural performance.
Fabrication Workflow
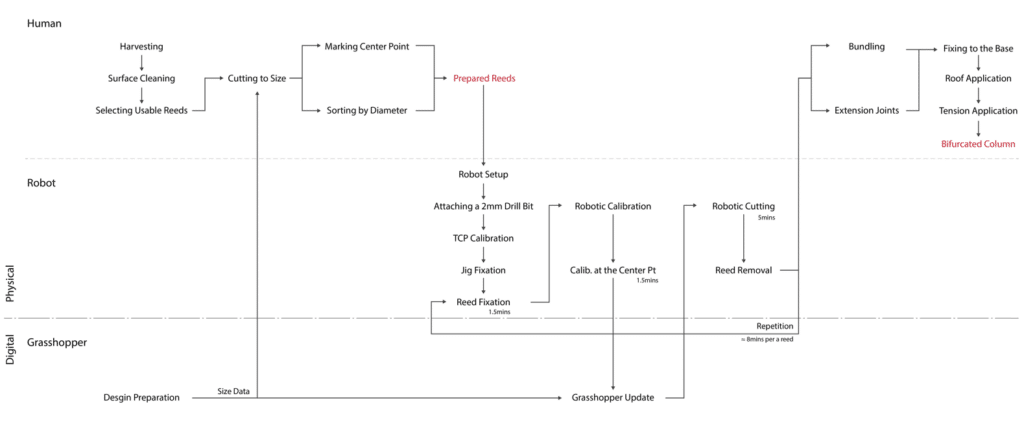
The fabrication process combines computational design, robotic manufacturing, and manual assembly. Each stage contributes specific tasks, creating an integrated workflow from material preparation to the final structure.
Robotic Milling Strategy
Conventional kerfing proved difficult to reproduce consistently due to the natural variation of reed. To overcome this challenge, we developed a robotic milling process capable of producing repeatable and highly accurate cuts.
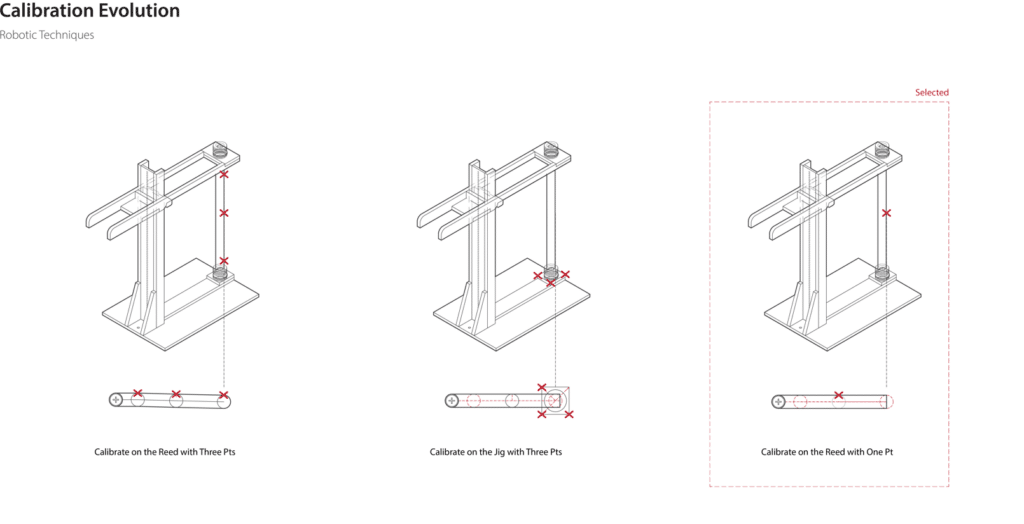
Calibration Process
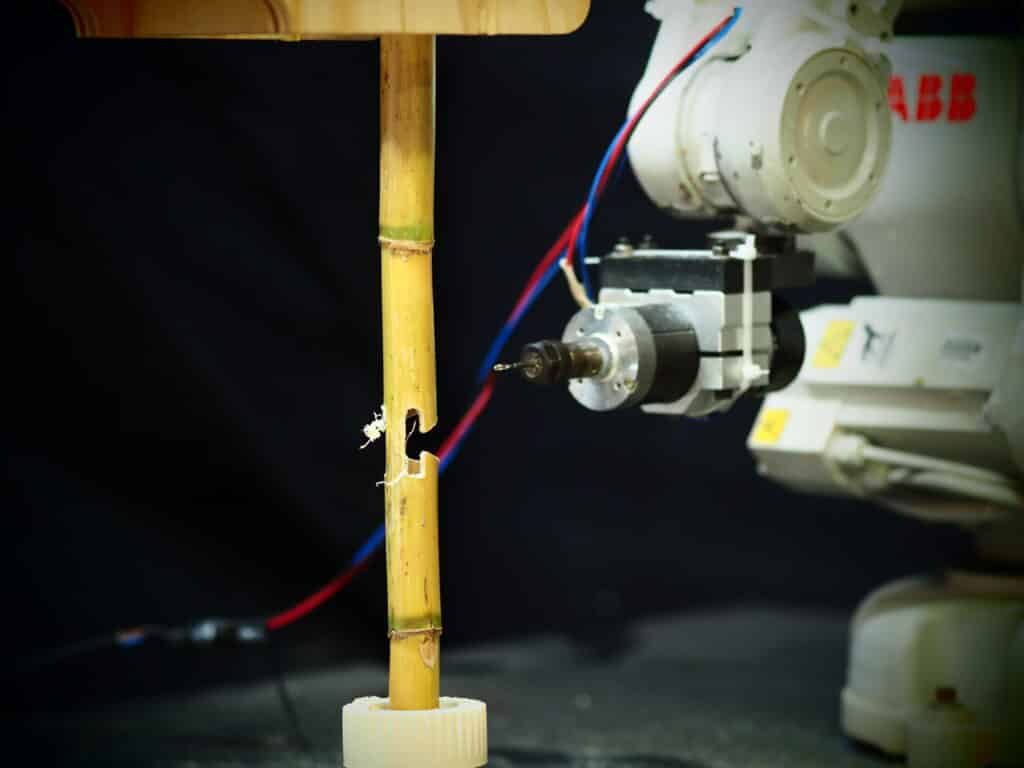
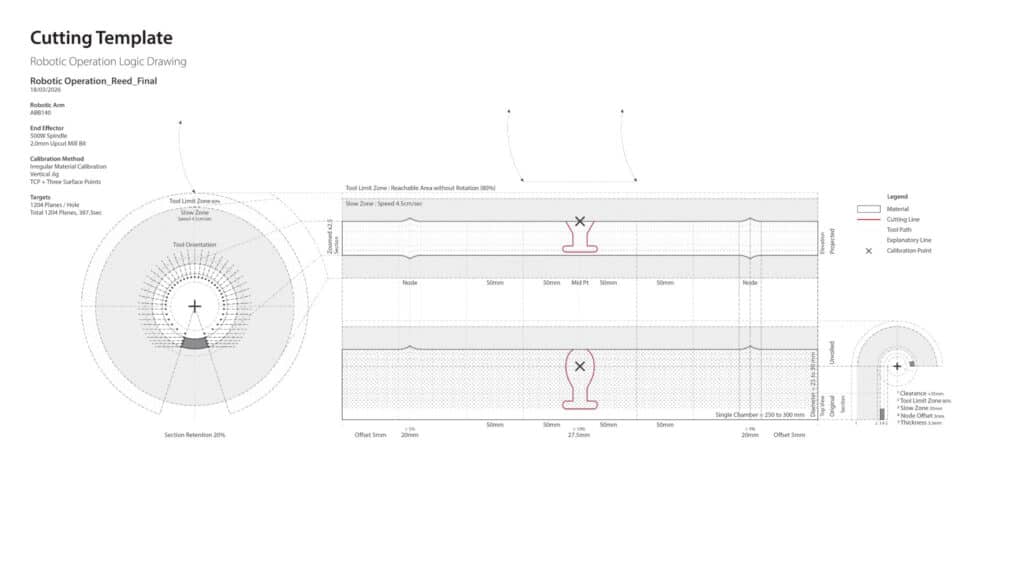
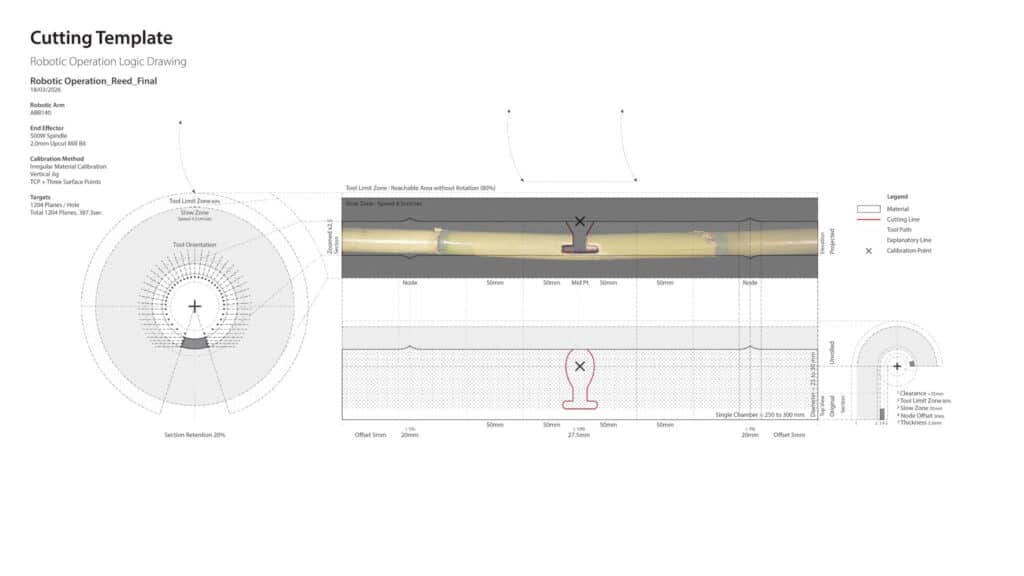
However, the cut whilst structurally more effective than kerfing is also more difficult to consistently take from the material, which varies in diameter and bowing from piece to piece. Here we began to introduce the robot as an appropriate tool. Able to complete the complicated cutting with consistency over a repeated process. As an end effector we used a 3mm downcut millbit, DC motor spindle on an ABB140. With a jig that allowed us to vary height whilst allowing a 270° degree approach radius for the robot we had control over height according to reed nodes, path navigation and speed, step depth and cut aggression via changing the spindles RPM.
Cutting Validation
The calibrated system was evaluated by comparing the theoretical cutting template with the physical milling results, allowing the cutting strategy to be refined through iterative testing. Here we can see this is achieved between what we proposed as a theoretical cutting template compared to an actual result overlayed.
Structural Behaviour
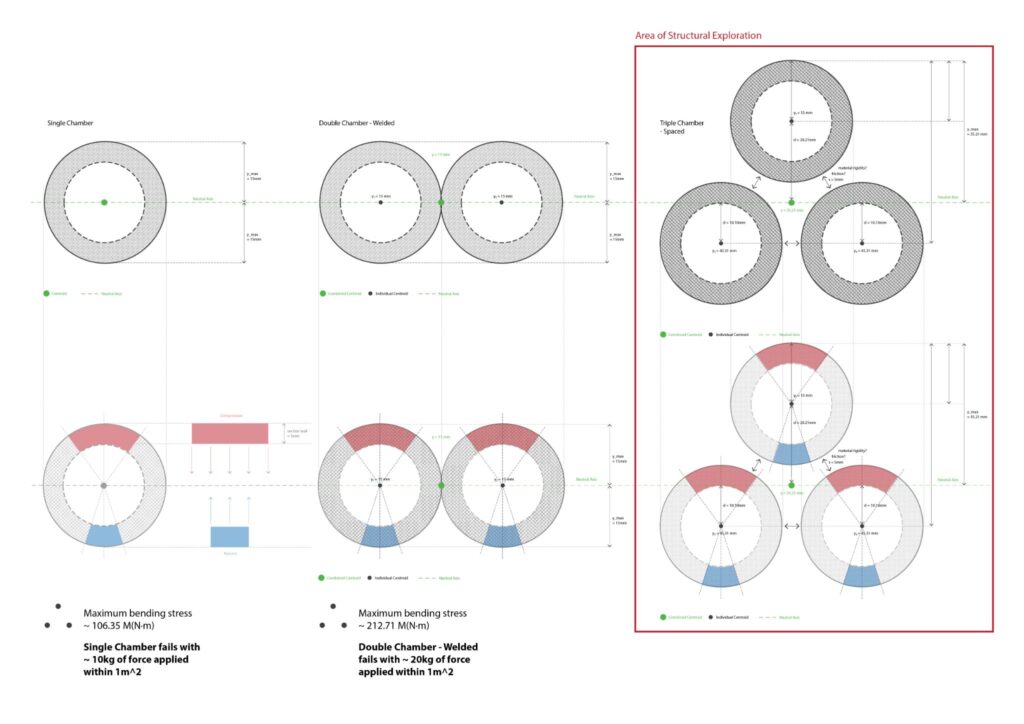
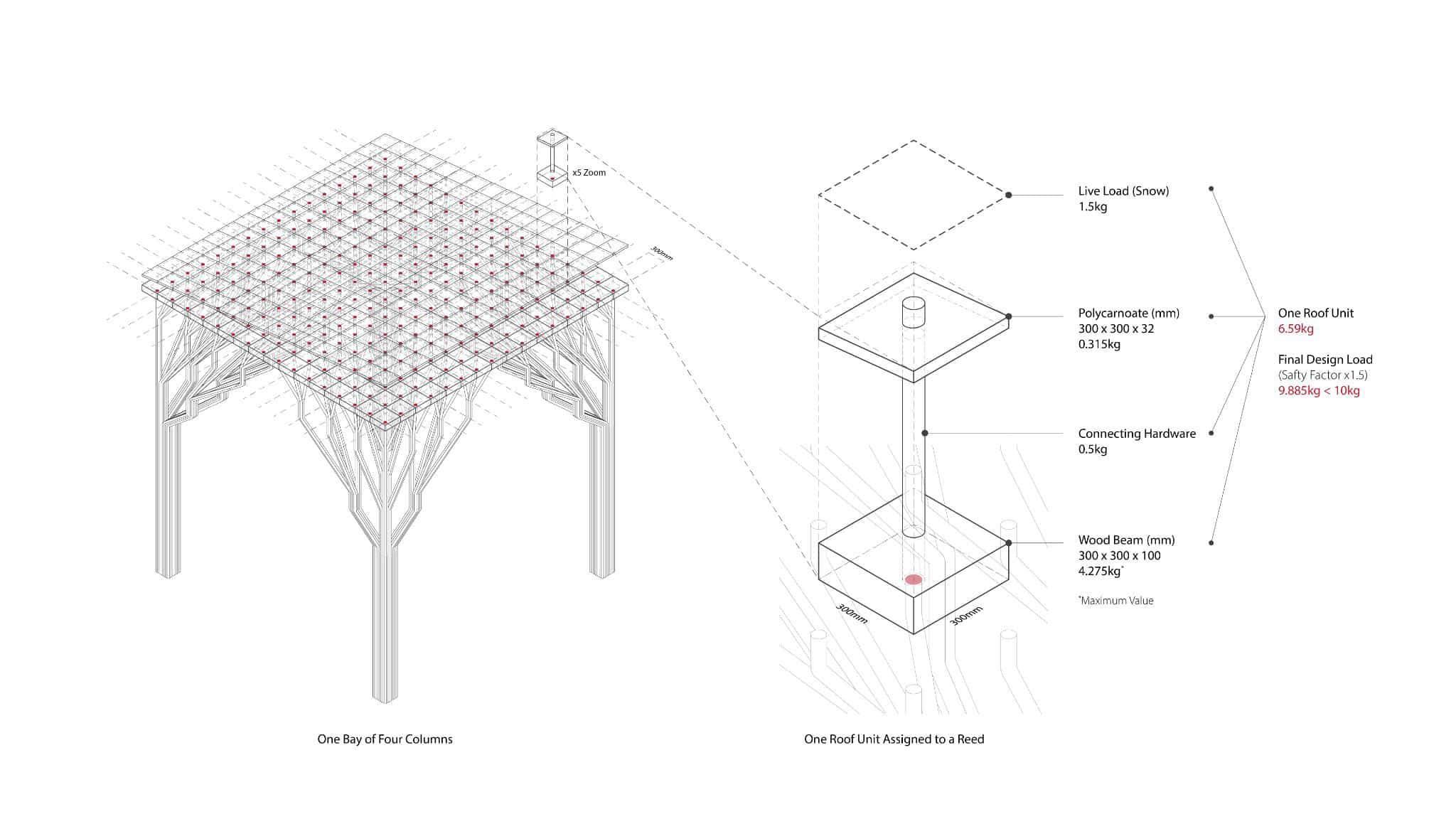
Now able to cut the reed in a compressive element a key consideration was the strength and fallibility of the elements to torsion. If load was placed on the wrong the elements fail. This is solved in traditional and modern tensile systems by bundling the reed. Together as a unified aggregate the load can be directed and unified into compressive and tensile moments where desired to be carried. Using Karamba we were to calculate these loads with structural Professor Joaquim Escoda Llorens from UPC. For each reed piece we calculated a load of an estimated 10kg per m2. As the system is aggregated this is load-bearing quality exponentially grows.
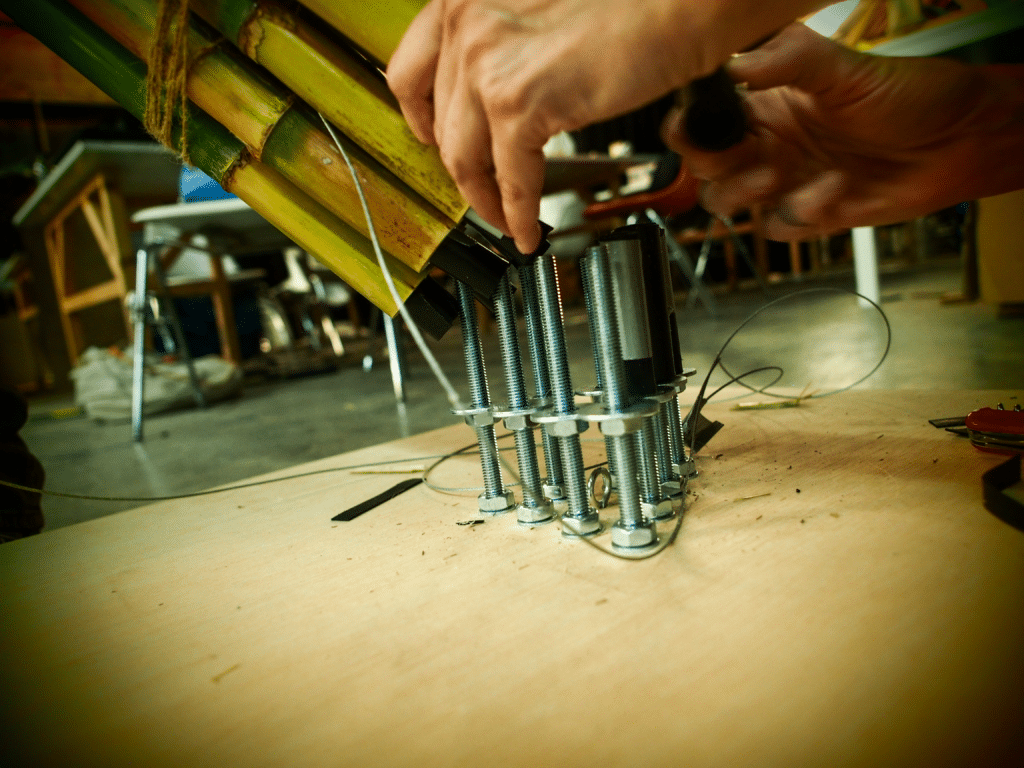
Joint Development
Taking an industrial approach we used simple to use bundling methods using string and laser cut MDF spacers/ joiners for an effective but simple bundling method externally as well as reed and rubber laminate strips internally.
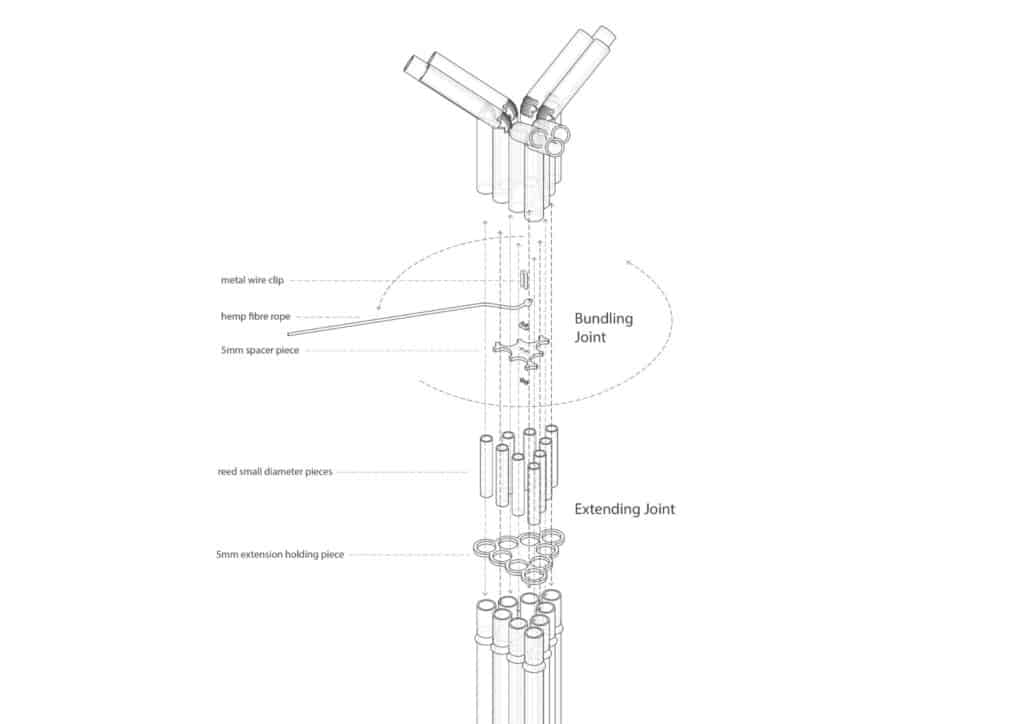
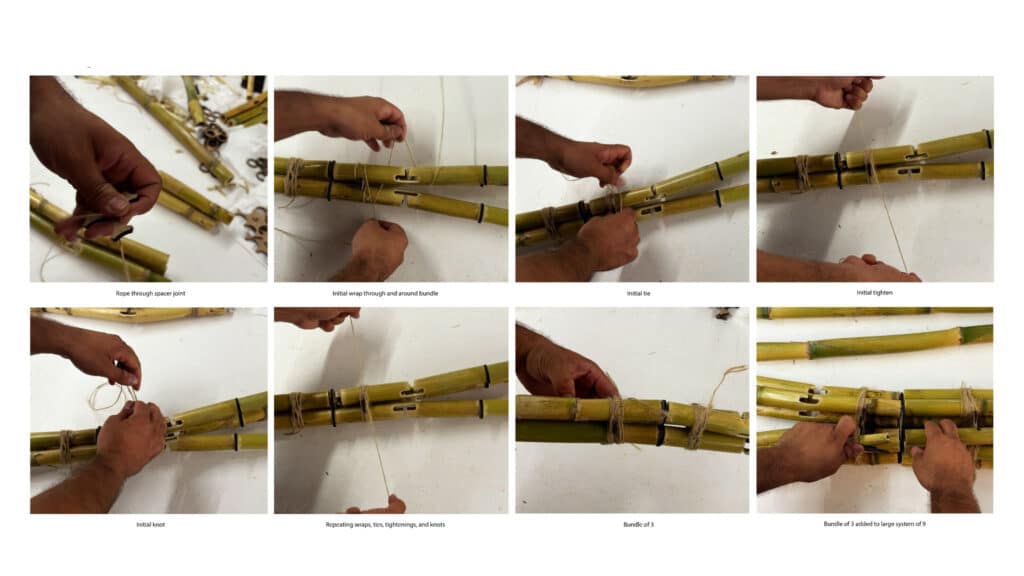
Assembly Process
The joint system was tested through a step-by-step assembly sequence, validating both the construction logic and the practicality of the proposed fabrication method.



The system then aggregates from a mix of 20° and 40° cut elements into a column units. This can the be repeated from the units with variation to form a colonnade at the top of the new IAAC building. We thought about how at the top of the building this intervention evolves the attic from a dingy storage space to an interactive archive where students can meet each other but also intermingle with examples of past research, inspiring future projects.
Assembly Intelligence
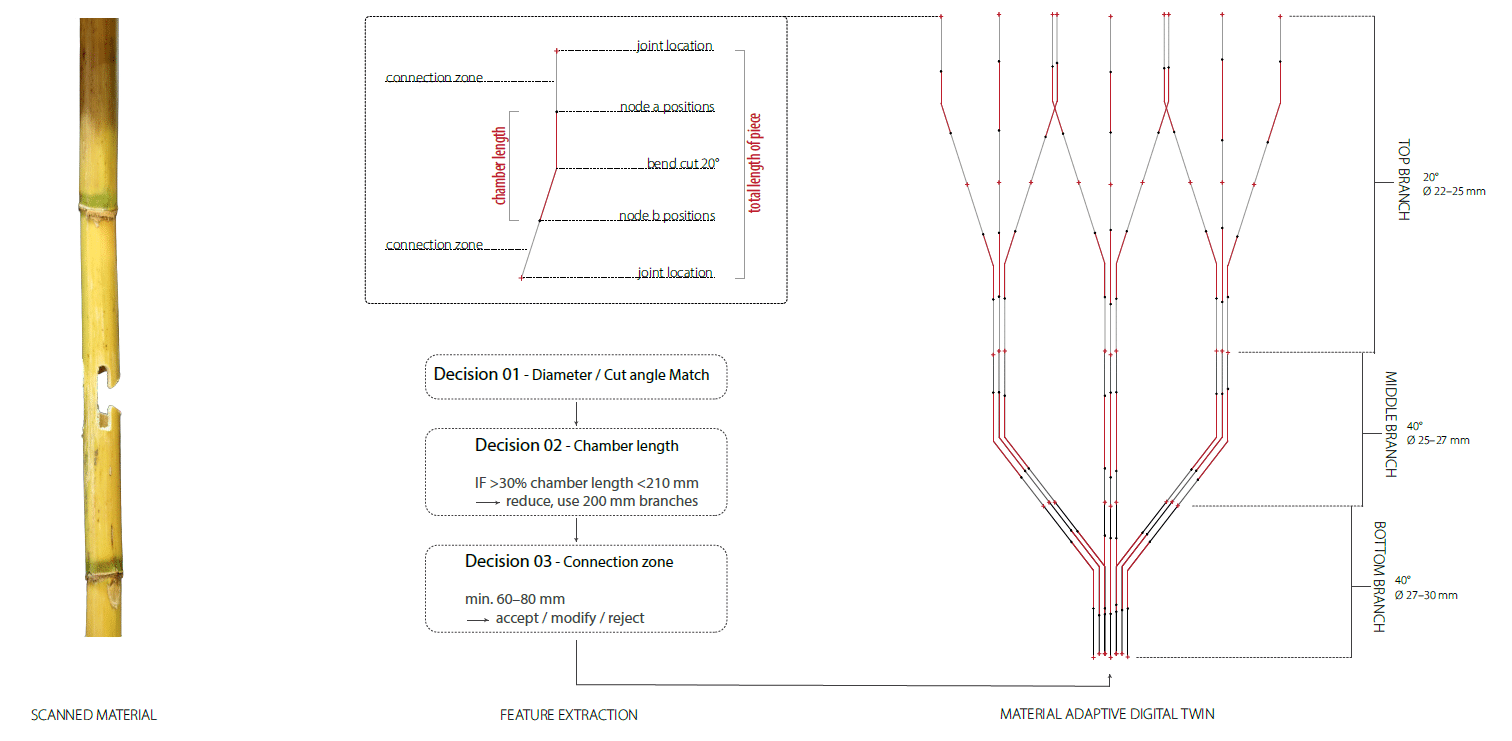
Through iterative prototyping, we developed a Python-based workflow and a Grasshopper digital twin that transform scanned reed data into assembly intelligence. Instead of adapting the material to the design, the system analyses material properties—such as node positions, chamber length, diameter, and bend angle—and automatically adapts the design geometry to the available material
Open-source workflow
The project is being developed as an open-source research workflow. The repository contains the Python scripts used for geometry extraction, digital twin generation and automated assembly planning
GitHub: https://github.com/kolchinheleri-tech/studio-reed-digital-twin
Robotic Milling Process
The video presents a robotic milling technique developed specifically for reed. The rotating milling tool executes highly precise cuts that are difficult to reproduce manually, enabling the material to bend in a controlled manner while expanding its fabrication potential
