Introduction
In Anatomy of a Machine: Spill, we designed and built our own paint-spilling tools and worked with large robotic arms to create expressive, A0-scale paintings. Over the weeks, we tested movements with our hands, translated them into robotic trajectories, and refined both the tools and the resulting spill patterns. Using Arduino and laser-cut acrylic parts, we programmed synchronized actions between the robots and our devices. Through continuous sketching, iteration, and robotic execution, we learned to choreograph motion, understand the potentials and limits of robotic arms, and embrace unexpected outcomes as part of the creative process.
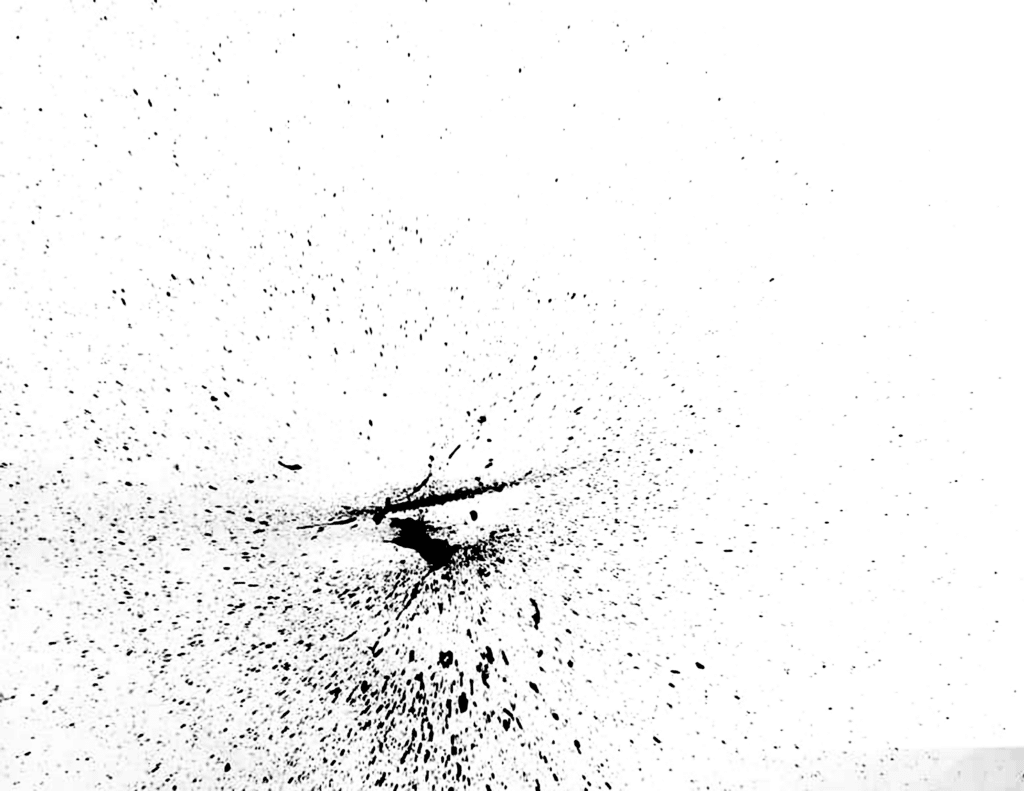
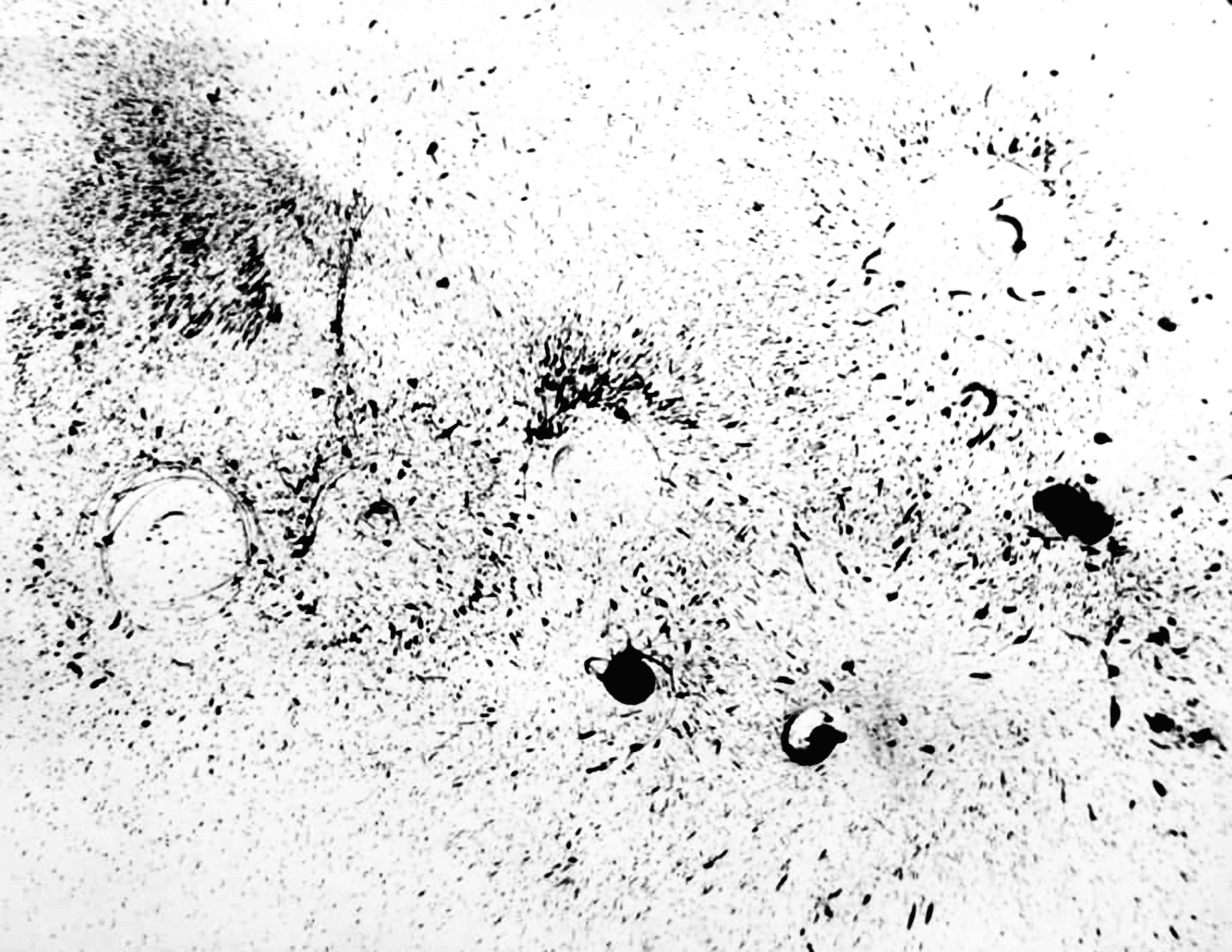
Step 01 – Manual Exploration
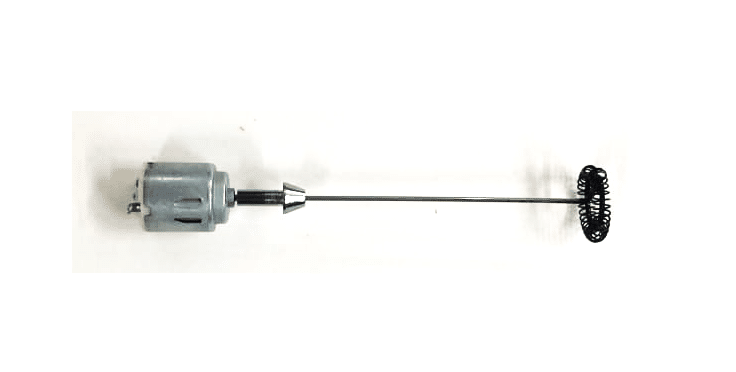
In the first stage, we experimented with hand-driven motions to understand how paint could be spilled expressively. By sketching gestures and observing the behaviour of ink, we identified movement patterns that could later be translated into robotic trajectories, forming the foundation for tool design and spatial composition. We began by experimenting with a small DC motor taken from a dismantled milk frother, which served as our first exploratory prototype
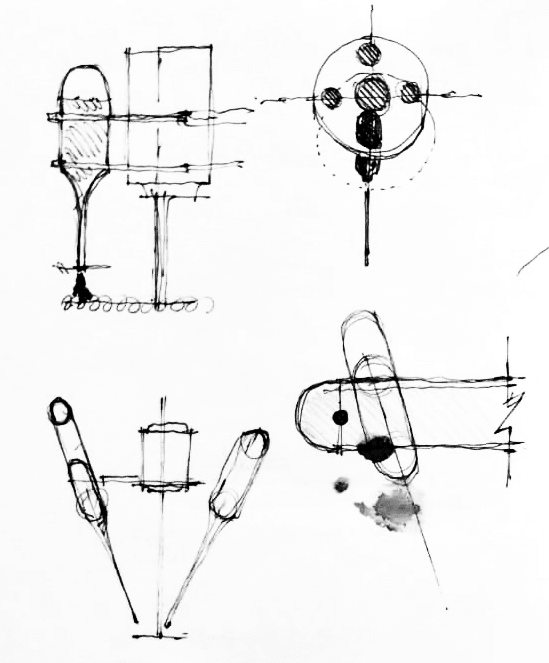
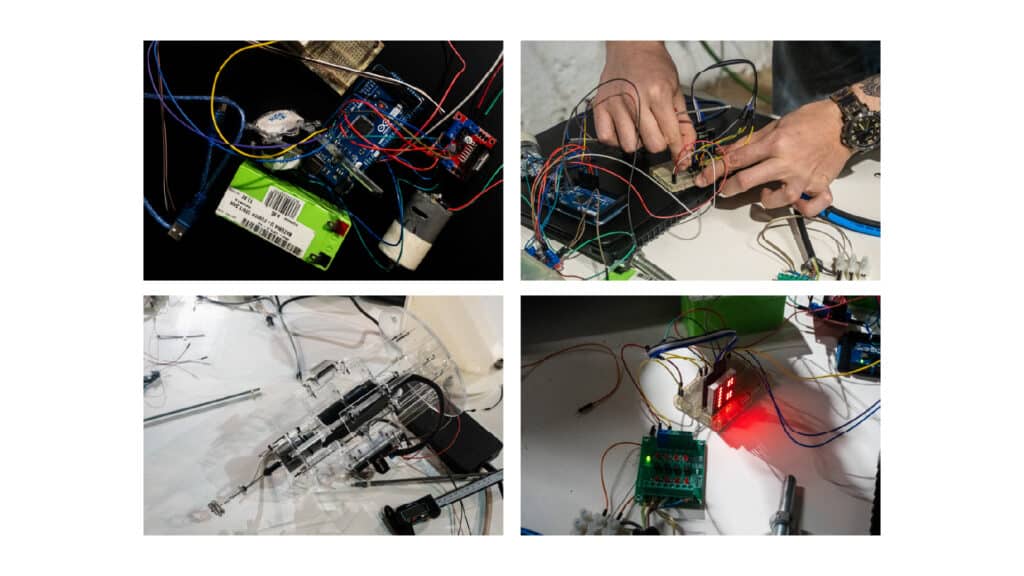
Step 02 – Endeffector Development
In this stage, we scaled up the design by using a 12V DC motor modulated through a dual H-Bridge L298N driver. To achieve a continuous supply of paint, we incorporated a peristaltic pump, which enabled precise control over the intensity and cadence of the paint being dispersed. The robot’s movement was programmed in Grasshopper, allowing us to control variables such as height, inclination, and flow throughout the painting process. We tested our custom-made spilling tools on the robotic arm, converting manual gestures into programmed paths. Through repeated trials, we observed how scale, speed, and timing affected the paint’s behaviour, refining both the tool and the robot’s movement to achieve controlled yet dynamic spill patterns.
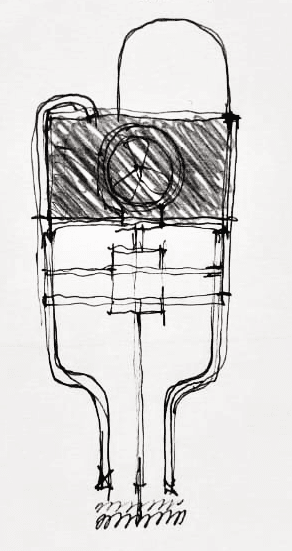
Endeffector Prototype
Robot Movement
Control variables
- Z Axis
- Endeffector Angle
- Ink feed Position
- Frother RPM
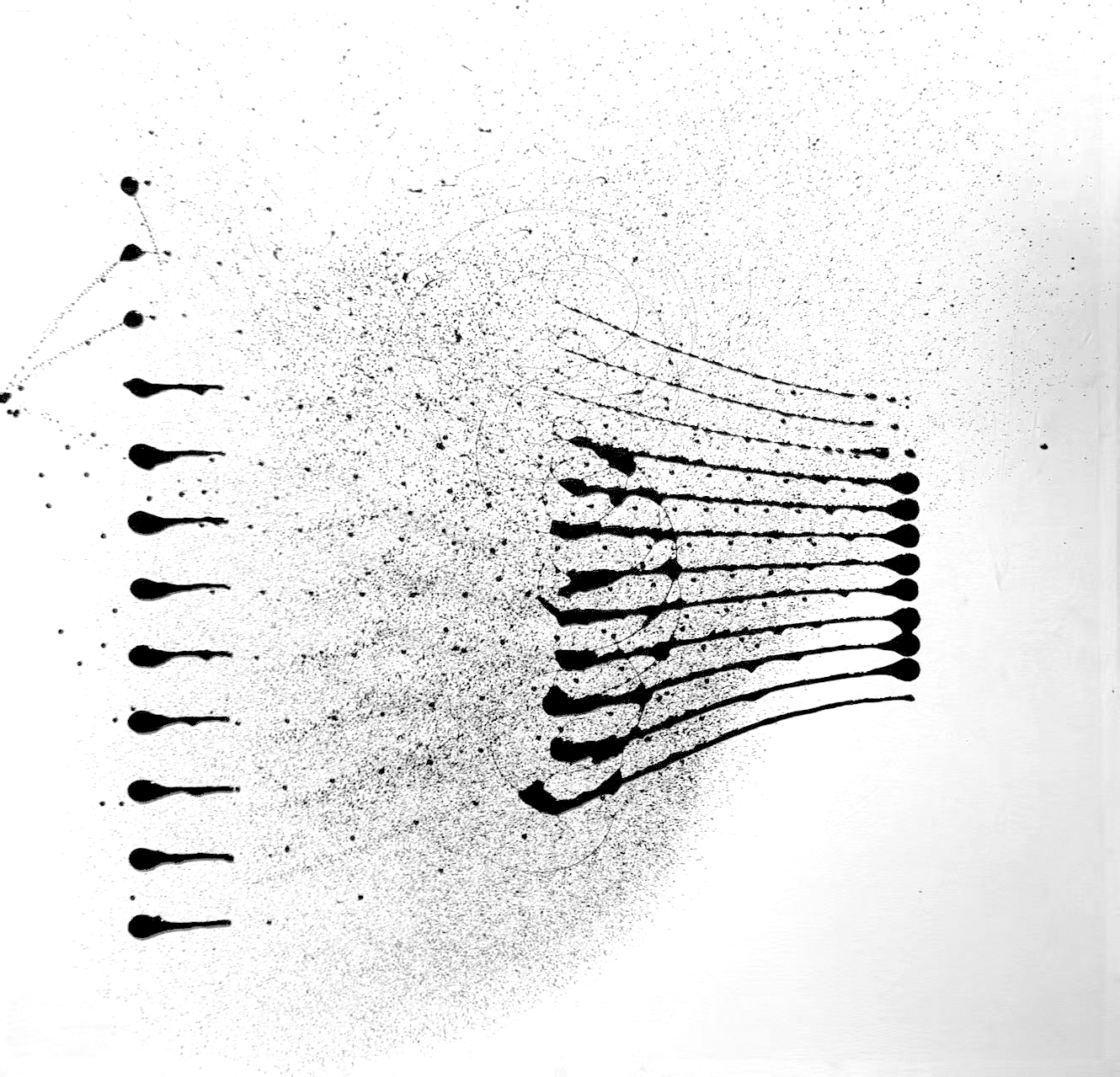
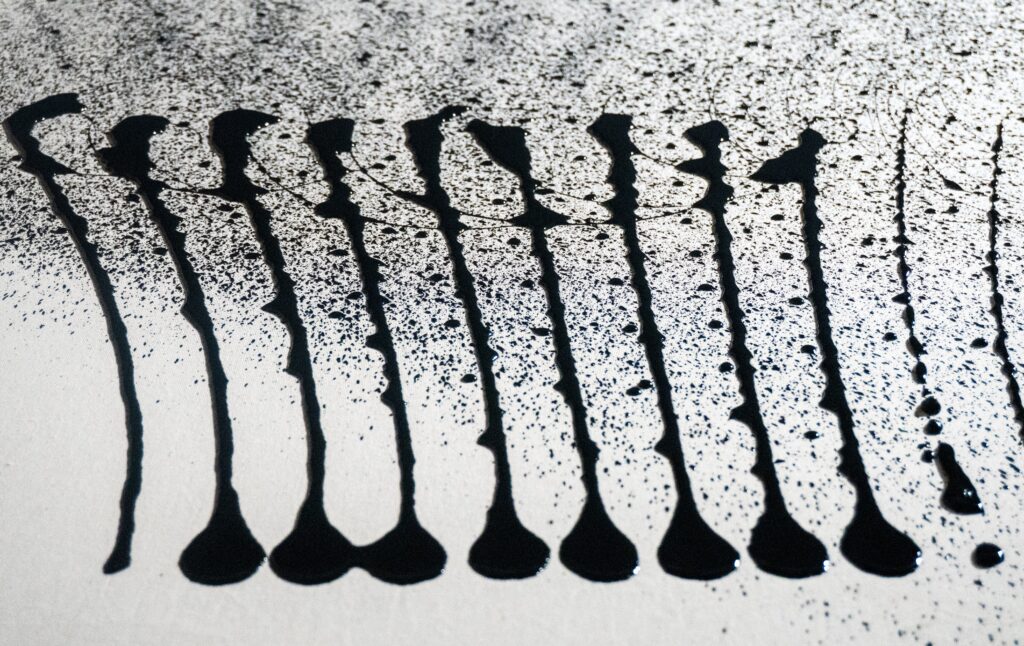
Step 03 – Final Implementation
In the final phase, we integrated our refined tools, trajectories, and robotic motions to produce the large-scale painting. This stage focused on synchronizing activation, movement, and timing, allowing us to translate our design intentions into a complete artwork that captured both precision and the unexpected qualities of robotic spill dynamics.
Endeffector – Final version

Robot Movement
Robot Drawing