
INTRODUCTION
The first assignment of Anatomy of a Machine investigates how a robotic system can produce a brushstroke, an action typically associated with human intuition, variability, and continuous motion. Rather than beginning with predefined toolpaths or digital control, the project starts by reframing the human hand as a machine. Through a series of analog drawing experiments, we examined how changes in pressure, speed, angle, reach, and paint viscosity influence the formation of a stroke.
These experiments functioned as an initial layer of data: a physical record of micro gestures and constraints inherent in mark-making. The focus was not on achieving an aesthetic outcome, but on understanding motion as information. This groundwork establishes a basis for translating embodied gestures into robotic logic, revealing how mechanical articulation and limitation shape the act of painting.
WORKFLOW
FIRST, Hand movement during painting was studied through the generation of hand-drawn strokes using brushes and acrylic paint. The focus was placed on observing how the hand joints were engaged and coordinated during different painting motions. Movements of the fingers, wrist, and arm were analyzed to understand their roles in controlling direction, pressure, and fluidity of strokes.
The observed data were recorded to understand how the joints were used and how the movements flowed. The study was done to help the team to turn human painting movements into robotic movements.
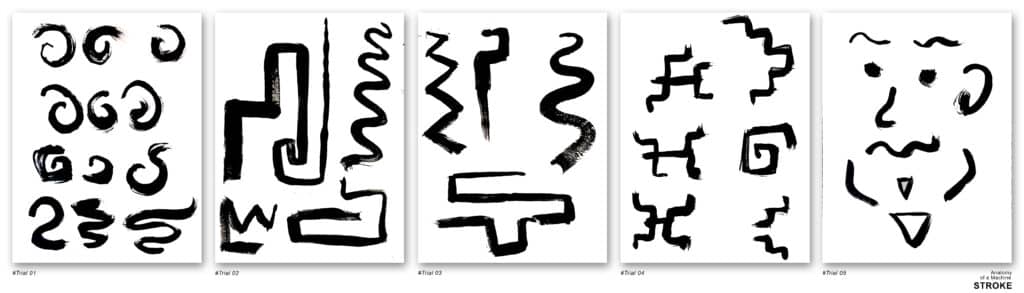
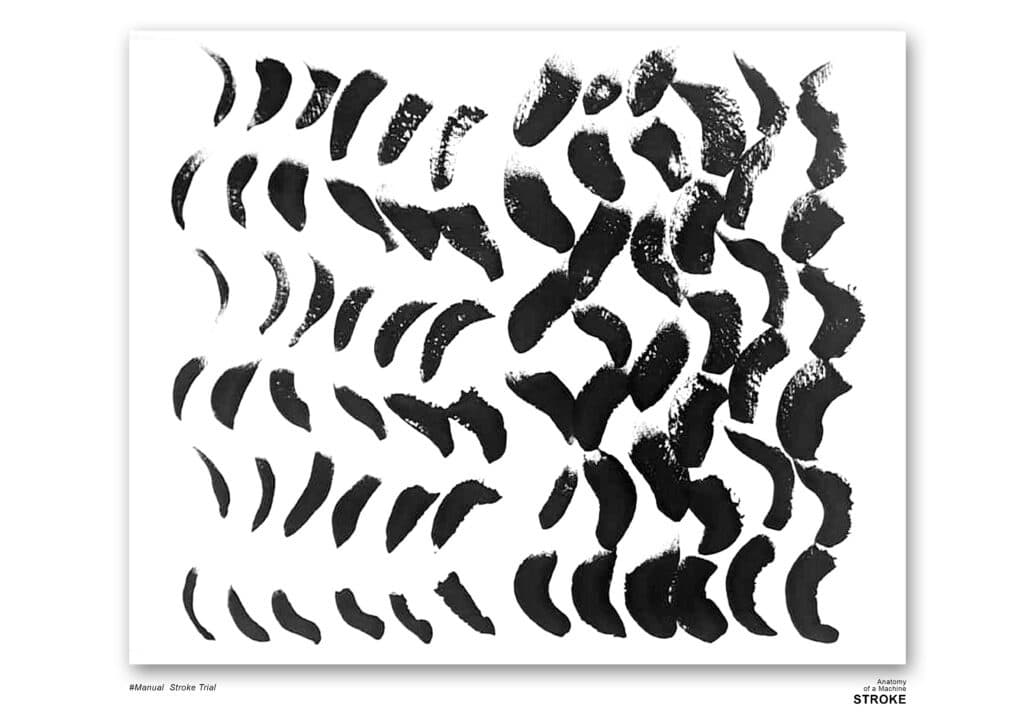
SECOND, A hand-drawn painting was produced consisting of twelve trajectories aligned along a vertical line. The painting process was intentionally carried out so that only one movement parameter was varied at a time, while all other factors were kept constant. This controlled approach allowed for a clearer observation of how specific changes affected the resulting stroke patterns. The generated trajectories were documented and analyzed as part of the study. Based on these observations, vector paths will later be extracted and used to translate the recorded human painting movements into a controlled and repeatable robotic motion.
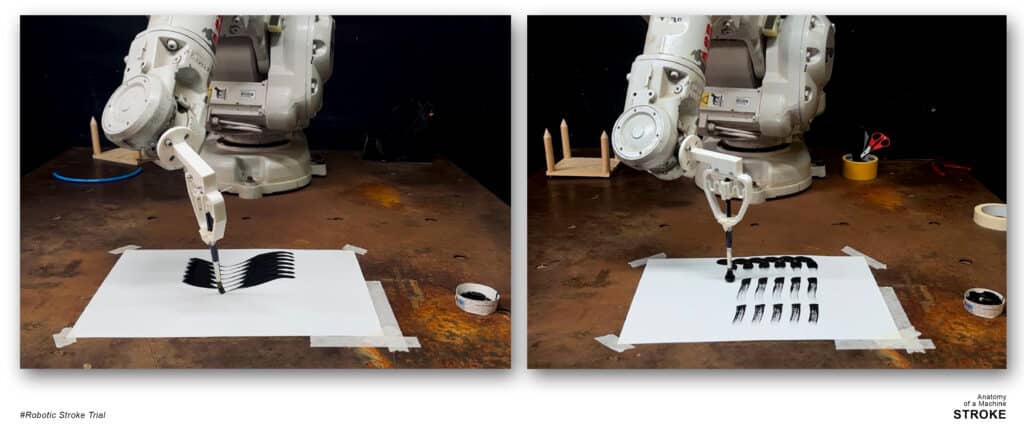
THIRD, Simple strokes were first generated using the robot before attempting the final outcome. This initial step was taken to test basic movement behavior and ensure that the robot could follow planned paths correctly. It also helped identify possible errors in control and alignment. By starting with simple strokes, the system performance could be checked and adjusted, allowing more stable and reliable execution before moving on to more complex and detailed tasks.
FINAL OUTCOME
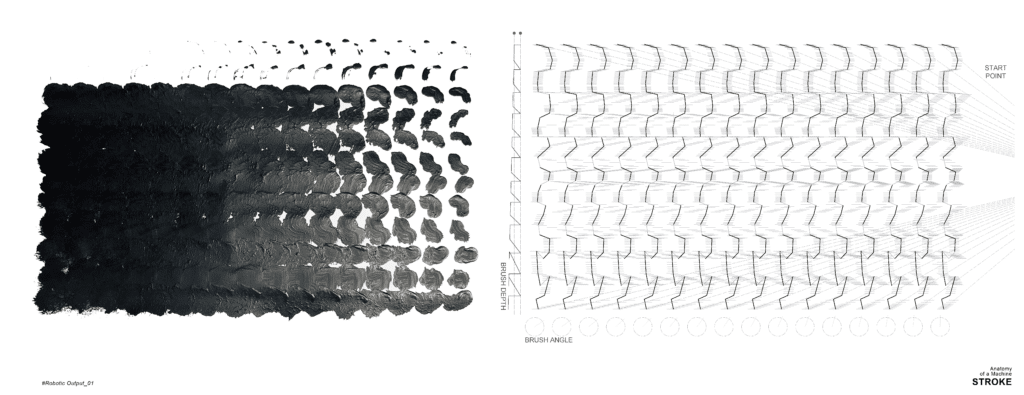
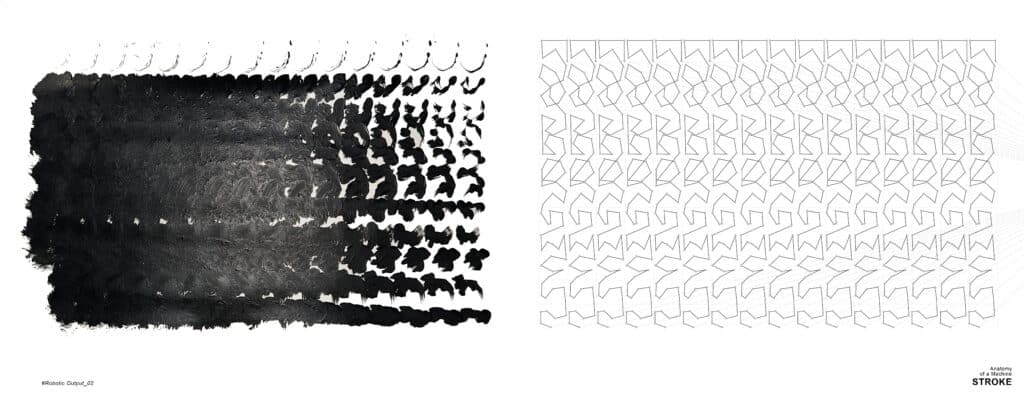
The final outcome shows a clear exploration of robotic painting, starting with strokes along a single line and moving to a grid where different movement patterns were tested. Each stroke was carefully made to show small changes in motion. The finished work highlights patterns in movement and how gestures can be turned into precise robotic actions. Overall, it demonstrates a balance between control and expression, showing how robots can follow human-like movements while revealing how changes in motion affect the look and structure of the strokes.
Robotic Outcome_01
Robotic Outcome_02
CONCLUSION
The Strokes assignment studied how human gestures work, moving from hand-drawn sketches to digital versions and then to robotic interpretation. A workflow was developed where creativity and control worked together, making it easier to analyze movement. The project led to a better understanding of motion, a system to control changes, and a robotic simulation that predicted future steps.
The robot was treated as a partner, not just a machine, and its actions were shown to come from human gestures. Strokes provides a foundation for future course work, where materials—like brush, clay, or other mediums—can be shaped using this improved understanding of motion, variation, and how humans and machines interact.
