
Aim
- Goal – To make use of autonomous rovers more intuitive and easy for all kind of professions.
- We attempt to explore a method of controlling autonomous rovers using a node graph of landmarks that are based on fiducial markers to optimize localization and launch move goals.
- Approach – This method was tested using a turtlebot, 2D Lidar for x and y data detection and an Astra camera to obtain distance to the Aruco markers with the objective of having the turtlebot autonomously navigate to different parts of IAAC Atelier interior.

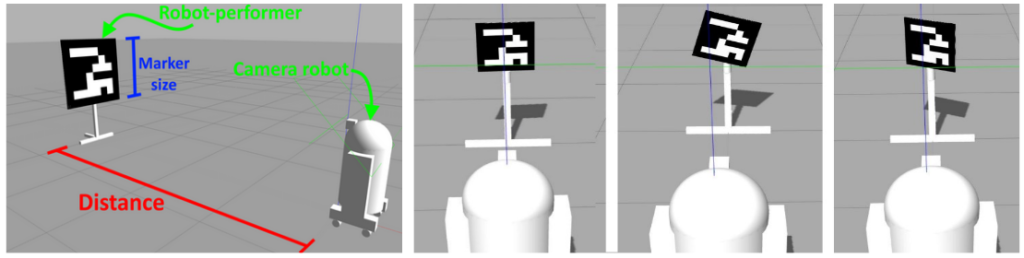
Fiducial Markers
Aruco fiducial markers were used for object detection and localization. Fiducial markers are black and white markers that can be detected and identified by computer vision algorithms, making them useful in a variety of applications. Here are some of the benefits of using Aruco fiducial markers:
- Easy to detect: Aruco markers are designed to be easily detectable by computer vision algorithms, making them an ideal choice for tracking objects and people.
- Accurate: Aruco markers can be identified with high accuracy, even in challenging lighting conditions or when partially occluded.
- Low-cost: Aruco markers can be printed on paper or other inexpensive materials, making them a cost-effective option for tracking and localization tasks.
- Versatile: Aruco markers can be used in a variety of settings, including robotics, augmented reality, and motion capture.
- Scalable: Aruco markers can be used to track multiple objects or people simultaneously, making them useful in applications where multiple entities need to be tracked at the same time.
- Open source: Aruco is an open-source library, which means that it can be freely used and modified by developers and researchers.
- Universal: library can detect other marker types (AprilTAg, Artag, etc.)
- Robust: resistant to rotation (X&Z axis), resistant to medium sensory noise
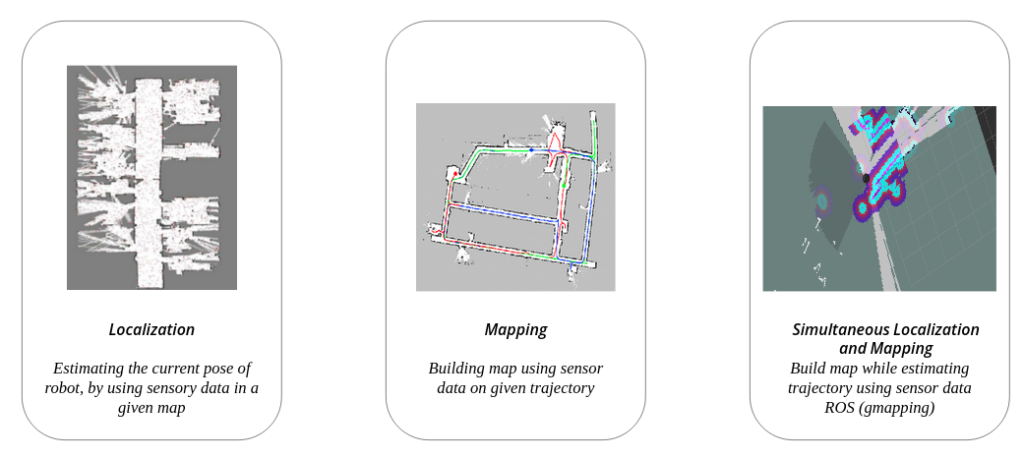
Localization & Mapping
Workflow

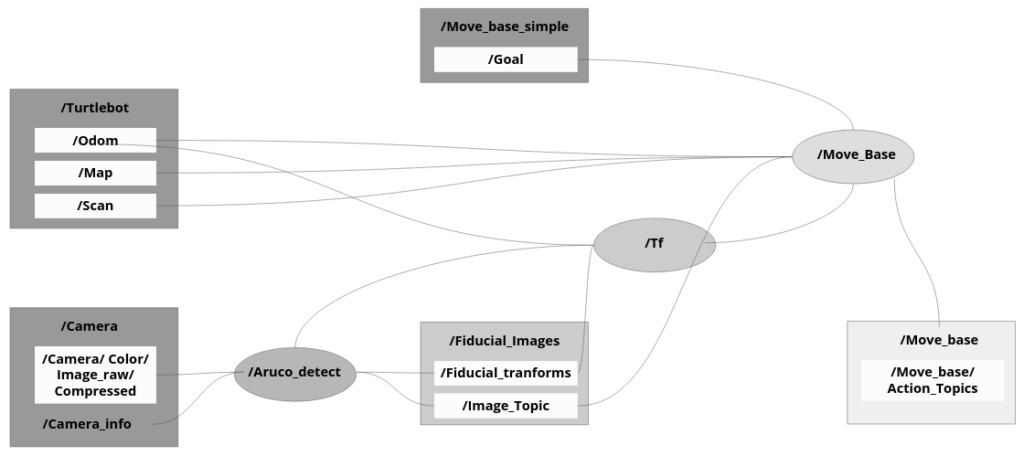
Node Graph
Pre-defining Goals
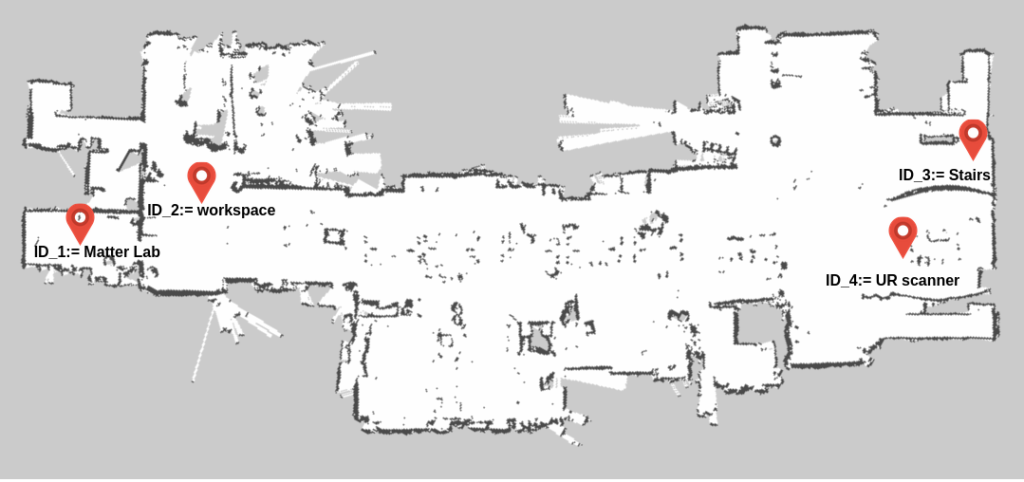
ID-3 Staircase exercise
ID-4 Scanner Exercise
Applications & Future Improvements
Applications
Manufacturing: The robot can be used in manufacturing facilities to automate the process of picking and placing products, reducing the need for human intervention and increasing efficiency.
Warehouse management: The robot can be used in warehouses to move products from one location to another. The ArUco markers can guide the robot to the correct location, and the robotic gripper can pick up and move the product to the desired location.
Agriculture: The robot can be used in agriculture to automate the process of harvesting crops. The robot can be programmed to detect and pick up ripe fruits and vegetables, reducing the need for manual labor.
Medical applications: The robot can be used in medical facilities to transport materials and equipment from one location to another, reducing the risk of infection and increasing efficiency.
Object tracking and recognition: The robot can be used in surveillance systems to track and recognize objects. The ArUco markers can guide the robot to the location of the object, and the robotic gripper can pick up and move the object if necessary.
Inspection and maintenance: The robot can be used for inspection and maintenance tasks in industries such as construction and oil and gas. The ArUco markers can guide the robot to the area that needs to be inspected or maintained, and the robotic gripper can be used to perform the necessary tasks.
Construction Industry: An autonomous robot with a robotic gripper mounted guided by ArUco markers can be useful in various applications in the construction industry, such as:
- Material handling
- Debris removal
- Inspection
- Bricklaying
- Welding
Overall, an autonomous robot with a robotic gripper mounted guided by ArUco markers is a versatile tool that can be used in various industries and applications to automate tasks and increase efficiency.
Future Improvements
- Attach a robotic arm and a gripper for industry assistance.
- Adding a kinect to enable gesture recognition for the easy interface and control by humans working along side.
- 3D Lidar scanner for real time mapping enabling object detection and localization for navigation .
