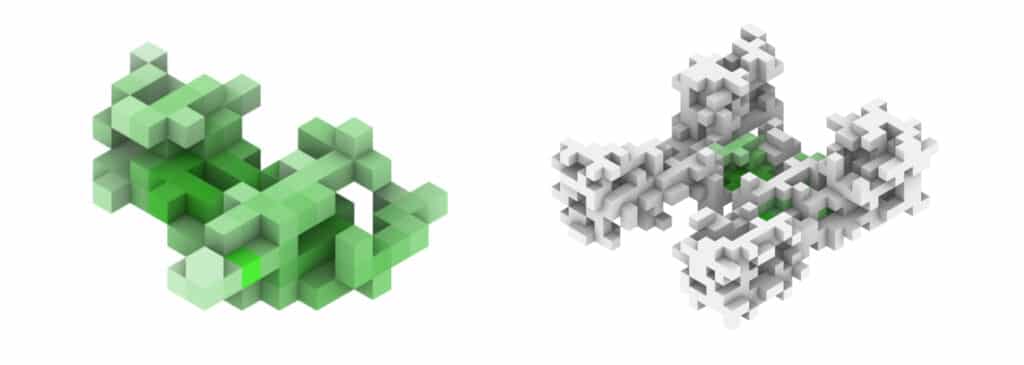
This project explores the computational assembly of components to form a multi-functional complex. By translating configurations into graphs, we applied Space Syntax logic to evaluate three key values : Depth, Integration, and Choice. The optimal architecture was selected based on the balanced symmetry of these indices. Finally, these analytical values directly guided the spatial programming, systematically defining private zones, public areas, and circulation pathways within the final assembled structure.
Custom Method
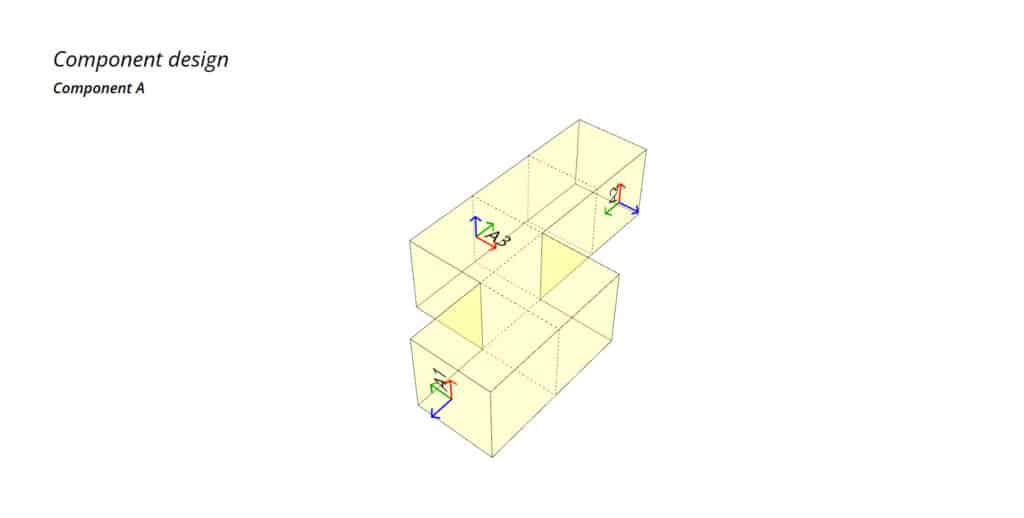
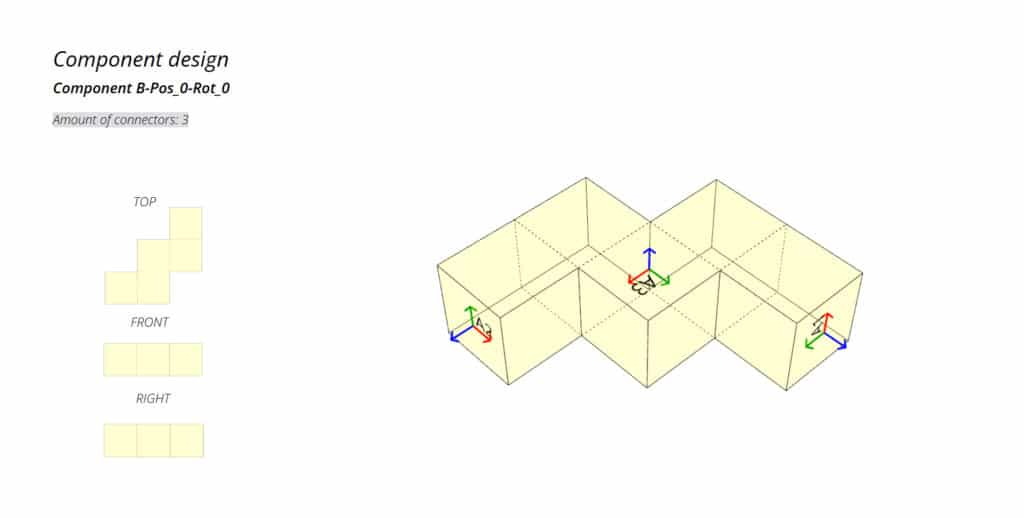
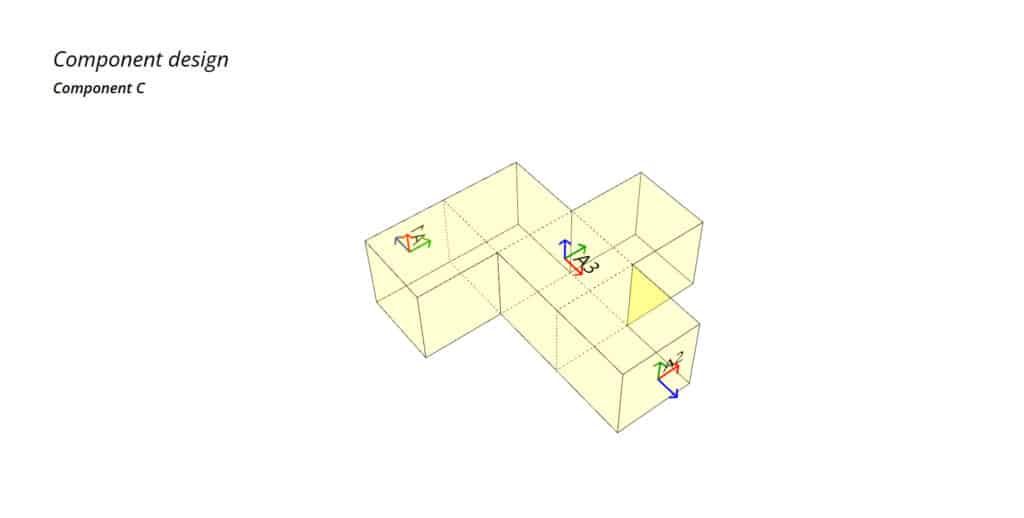
Custom method
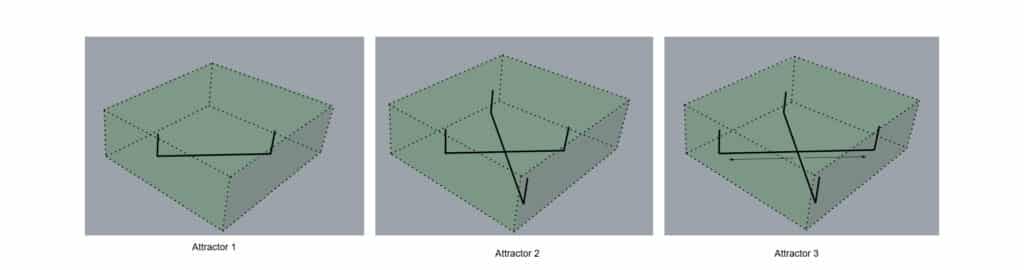
Drawing upon Hillier’s configurational theory in Space is the Machine, the metabolic growth of spatial assemblages within a constrained boundary can be syntactically governed by manipulating directional curves and compactness.
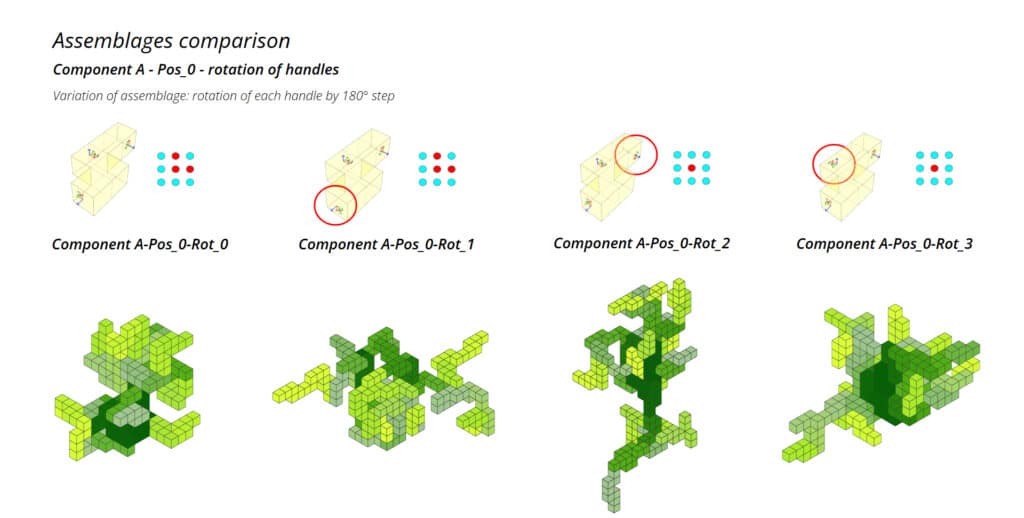
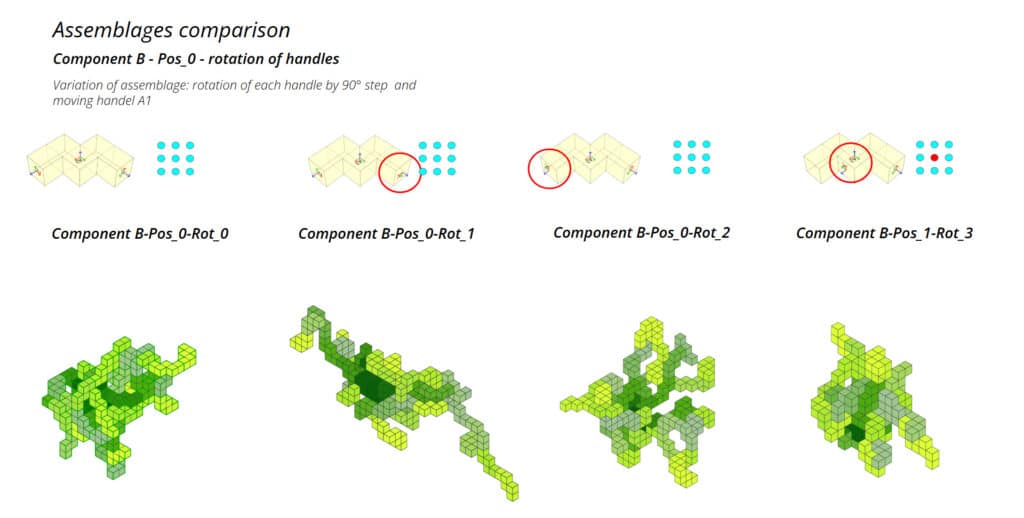
First, the foundational geometry of the directors alters the global network: a single curve generates linear or dendritic configuration, whereas two intersecting curves establish a distributed, interconnected configuration. Second, the spatial reach of these curves dictates the pattern’s centrality. Extending the directors toward the boundary corners decentralizes the layout, producing articulated patterns with increased depth. Conversely, retreating them toward the center consolidates the integration core, resulting in a shallower, more cohesive configuration. Finally, the overall depth-to-integration ratio is governed by a fundamental configurational rivalry. The attractive strength of the curves pulls the assemblage outward, generating deep, segregated branches. This is directly countered by the systemic drive for compactness, which minimizes depth to maximize integration. Modulating this tension between linear attraction and systemic compactness enables morphological control over the emergent syntactic properties of the final configuration.
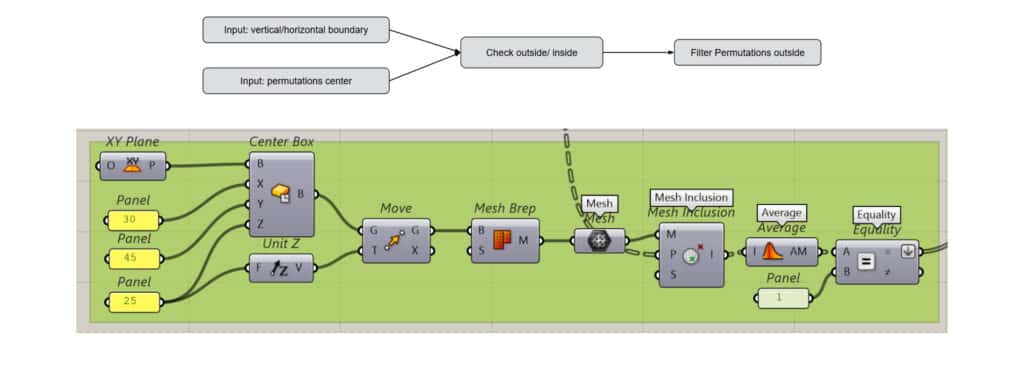
Logic diagram
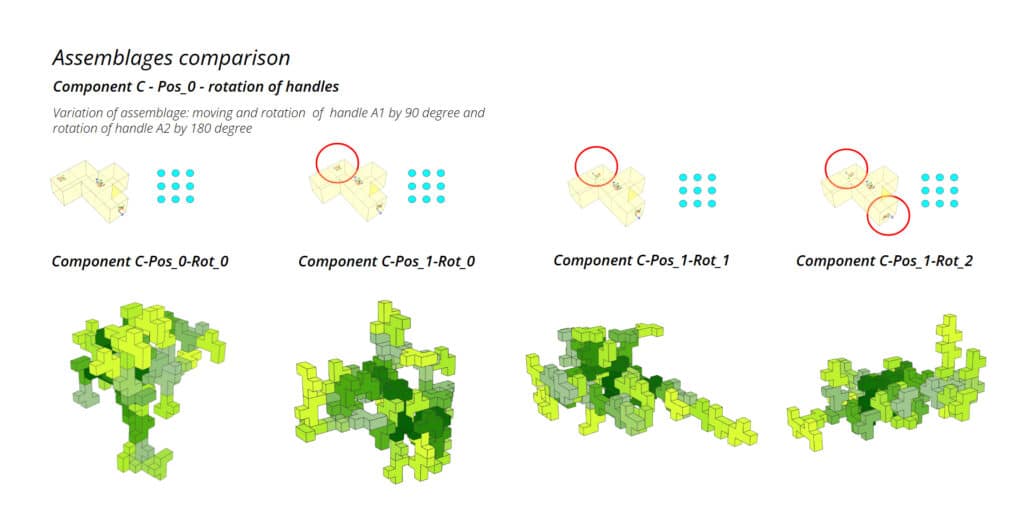
This approach outlines a tailored adjustment of the reference logic by altering the method of geometry filtering and selection within the loop. The horizontal and vertical limits of the site are established by a box of a specific dimension. This allows us to manage the construction height both above and below the ground, as well as the horizontal boundary. In order to develop spectrum of assemblages that are topologically configured to facilitate different patterns of movement, gathering and separation , two attractor curves are identified. And, by utilizing compactness as another selection criterion, the growth is guided around these curves in a controllable compact manner.

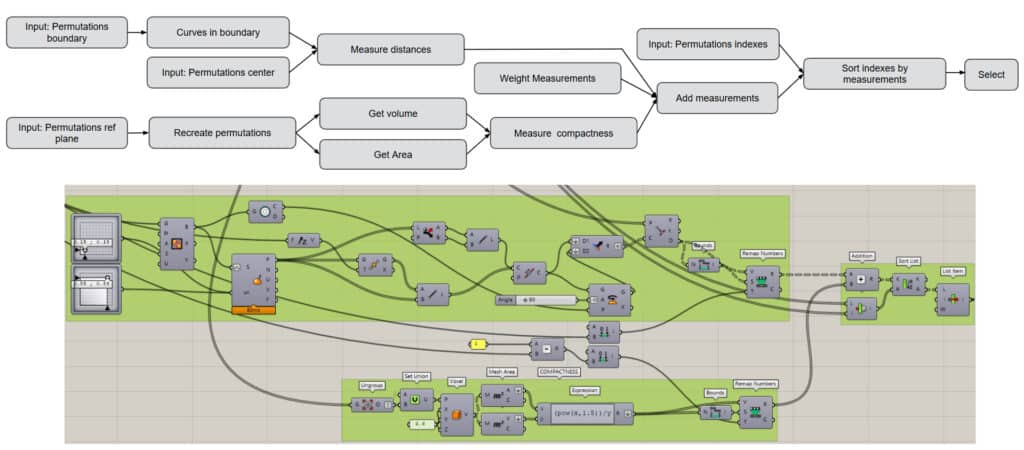
Filtering
Selection
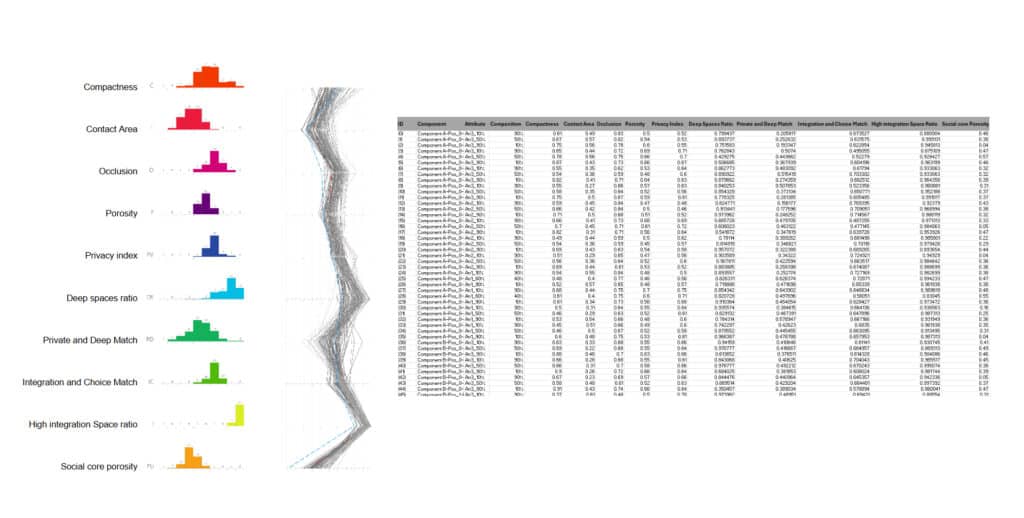
Evaluation criteria
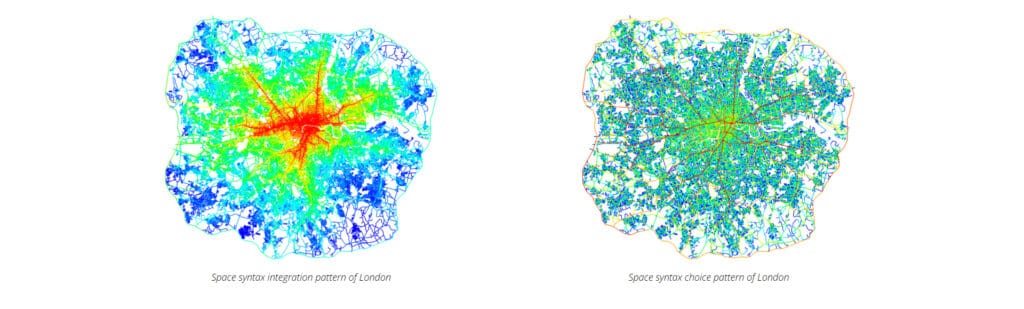
Space Syntax
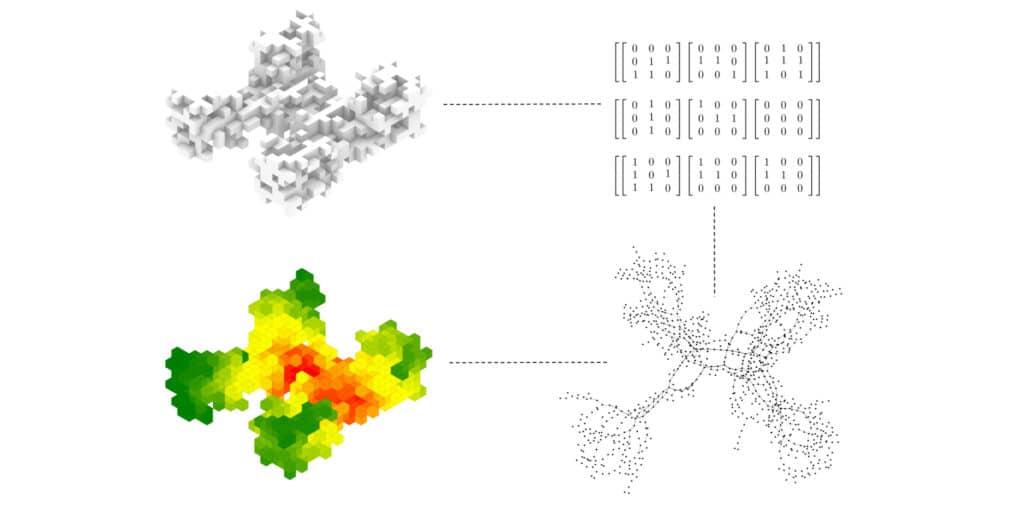
Space syntax is an analytical framework used in architecture and urban planning to evaluate how spatial layouts influence human behavior. By mapping spaces as interconnected networks, it reveals movement patterns, social interactions, and accessibility levels, through j-graph (justified permeability graph) and Provides three main indexes:
Depth, Integration and Choice
Assemblage to matrix
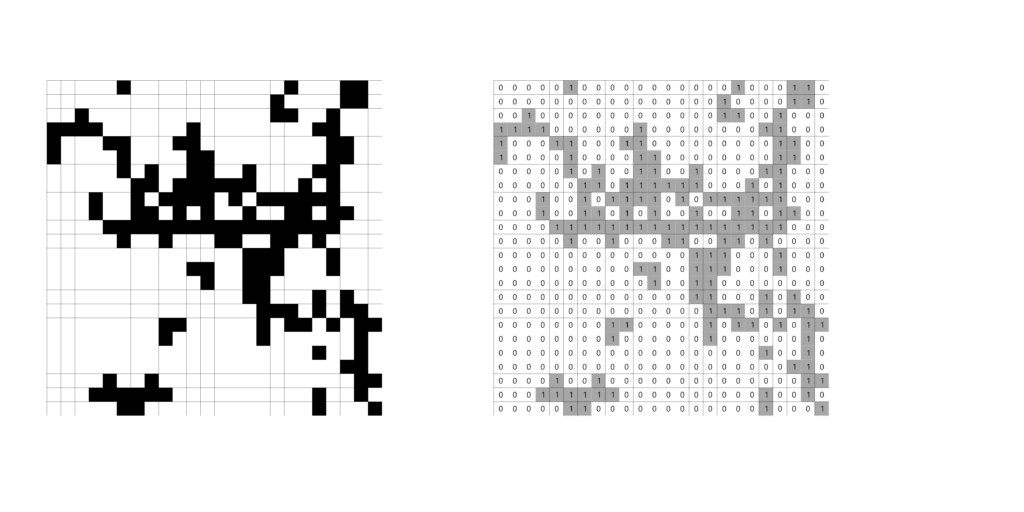
Process
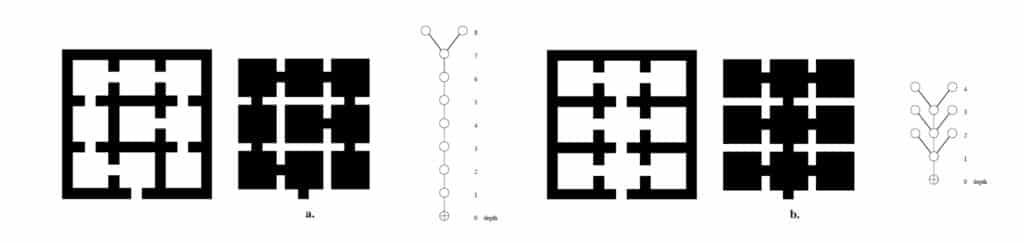
Depth
Measures how directly accessible or deeply segregated a location is within the spatial network
Calculating Depth:
- Depth 0: The root space itself.
- Depth 1: Any space immediately directly accessible from the root (one door away).
- Depth 2: Spaces that require passing through a Depth 1 space to reach (two doors away), and so on
Integration
Measures the global accessibility of a specific space within a network
Calculating integration
- Total Depth (TD): Sum the topological depths (number of steps) from your chosen root space to all other $k$ spaces in the system.
- Mean Depth (MD): Average this depth by dividing by the number of other spaces: $MD = \frac{TD}{k – 1}$.
- Relative Asymmetry (RA): Normalize the depth between the theoretical minimum (a completely shallow bush) and maximum (a completely deep sequence): $RA = \frac{2(MD – 1)}{k – 2}$.
- Real Relative Asymmetry (RRA): Divide RA by the ‘D-value’ (an empirical constant based on $k$) to allow comparison across differently sized systems.
- Integration: Find the inverse: $Integration = \frac{1}{RRA}$.
Choice
Measures through-movement for a specific space
Calculating Choice:
- System Pairs: Identify every possible pair of spaces (nodes) within the entire spatial system.
- Shortest Routes: Determine the shortest topological path (the minimum number of steps) connecting each pair.
- Intersection Count: For your target space, count exactly how many of these system-wide shortest paths pass directly through it.
- Proportional Flow: If multiple shortest paths exist between a pair of nodes, divide the movement flow equally among them.
- Total Choice: Sum these intersections. Mathematically, it is calculated as: $Choice = \sum \frac{g_{jk}(i)}{g_{jk}}$ (where $g_{jk}$ is the total shortest paths between node $j$ and node $k$, and $g_{jk}(i)$ is the number of those paths passing through your target node $i$).
Higher values indicate spaces that act as critical bridges or main arteries for movement

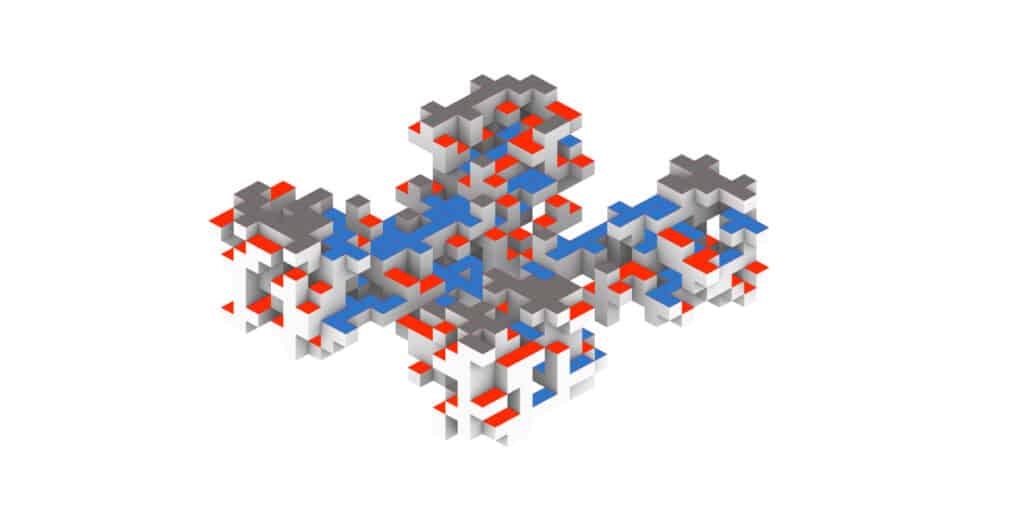
Integration | Choice Graph
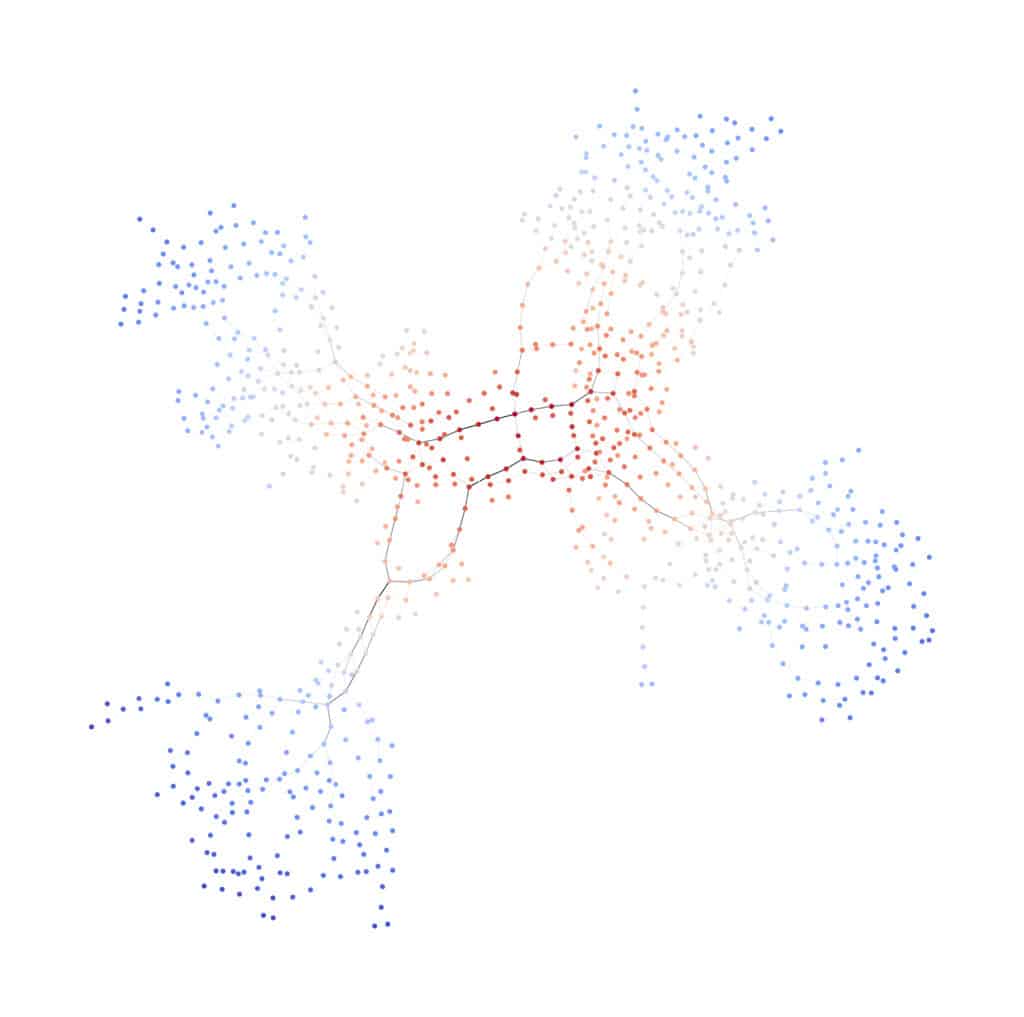
Integration | Choice
Privacy | Depth
High integration
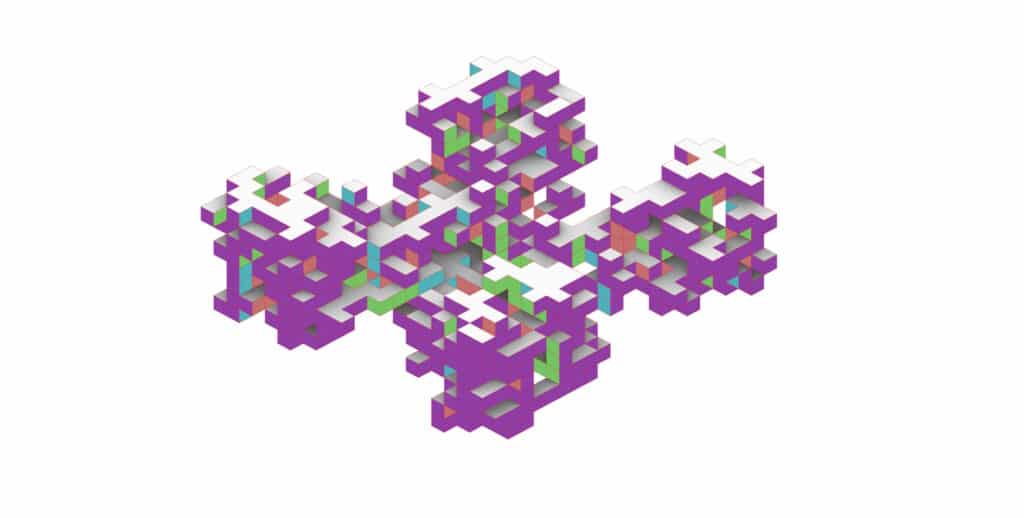
Measuring assemblages features
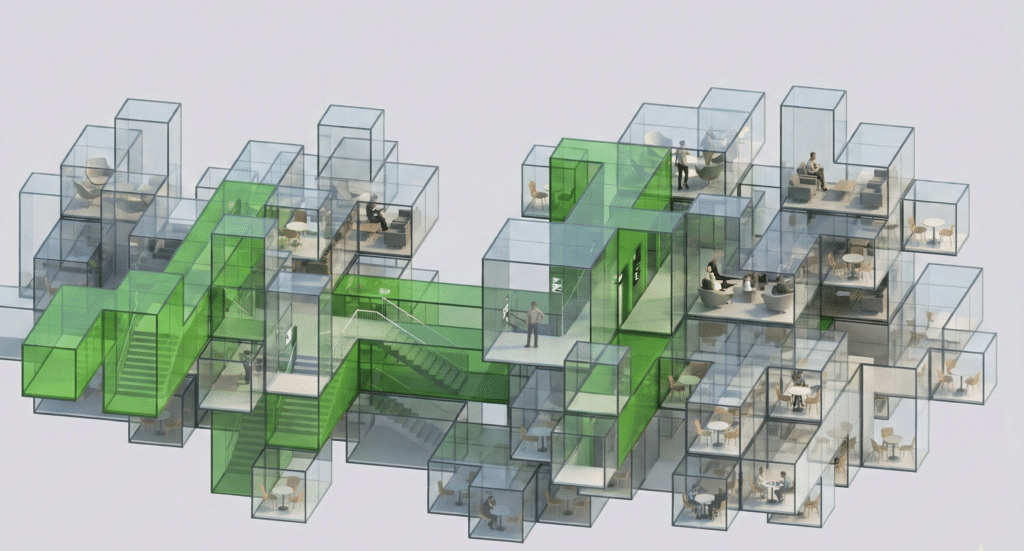
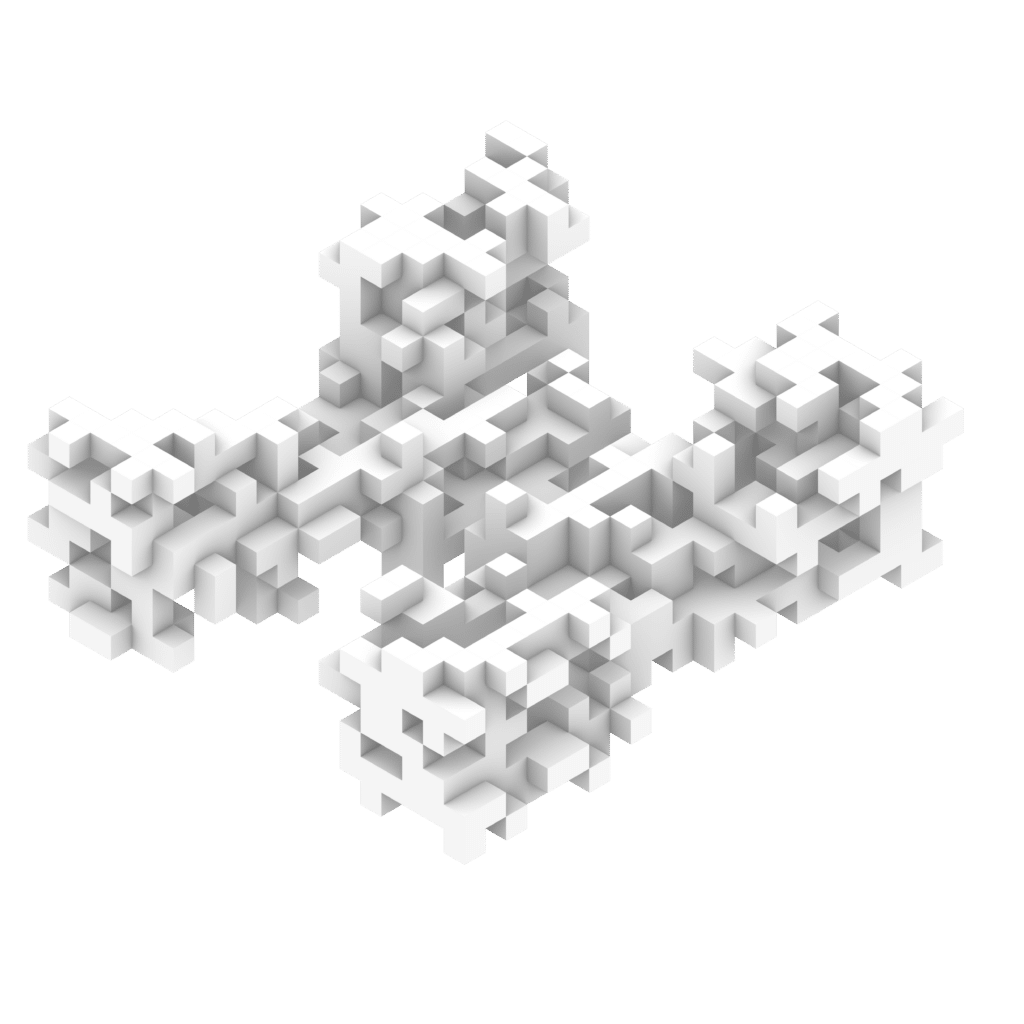
Assemblage Selection
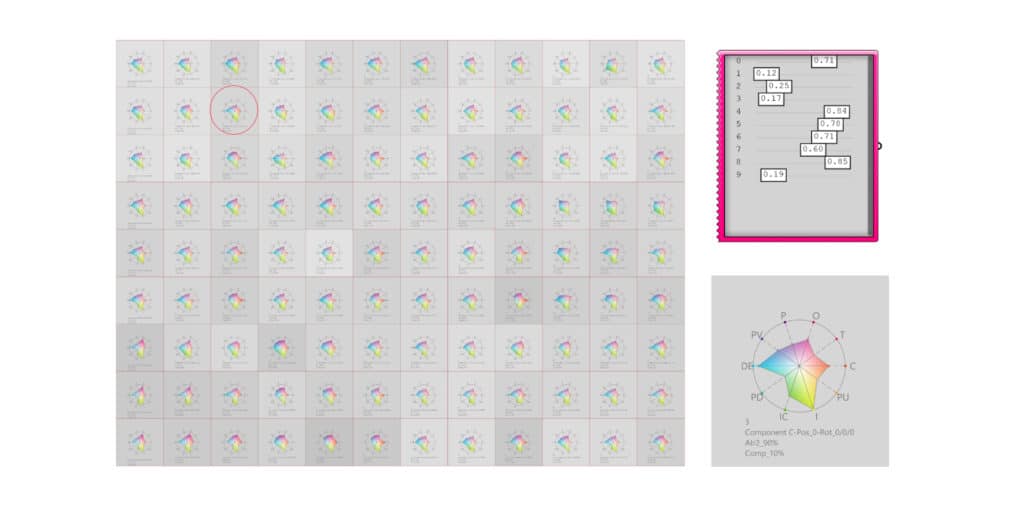
Selected assemblage
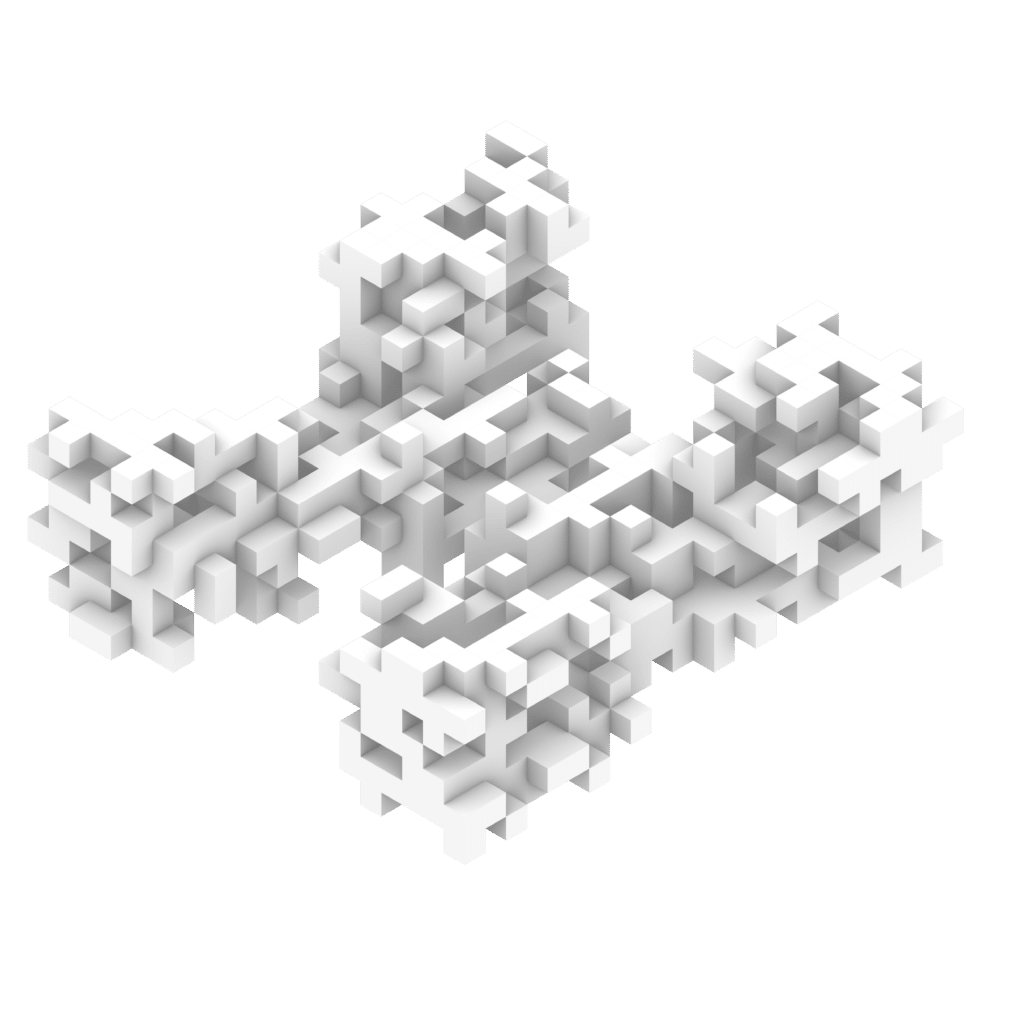
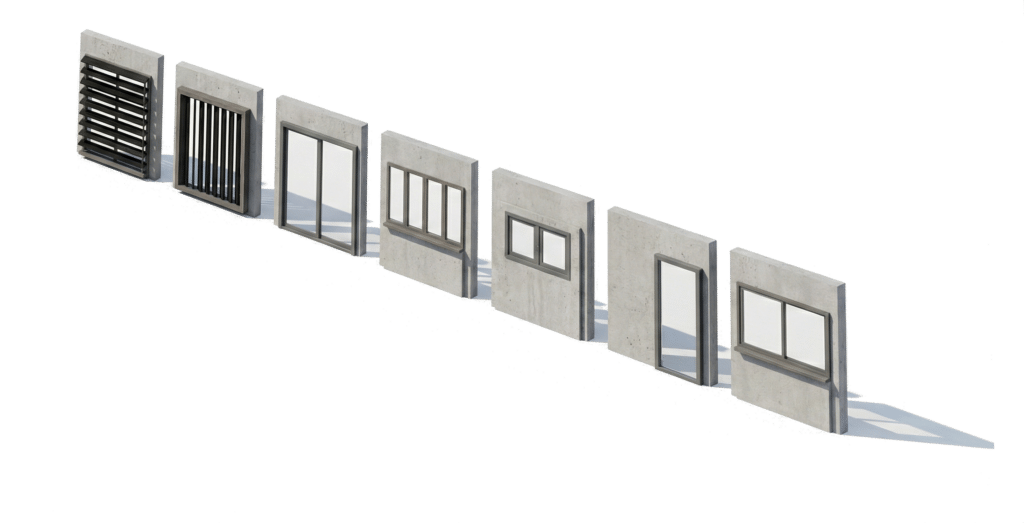
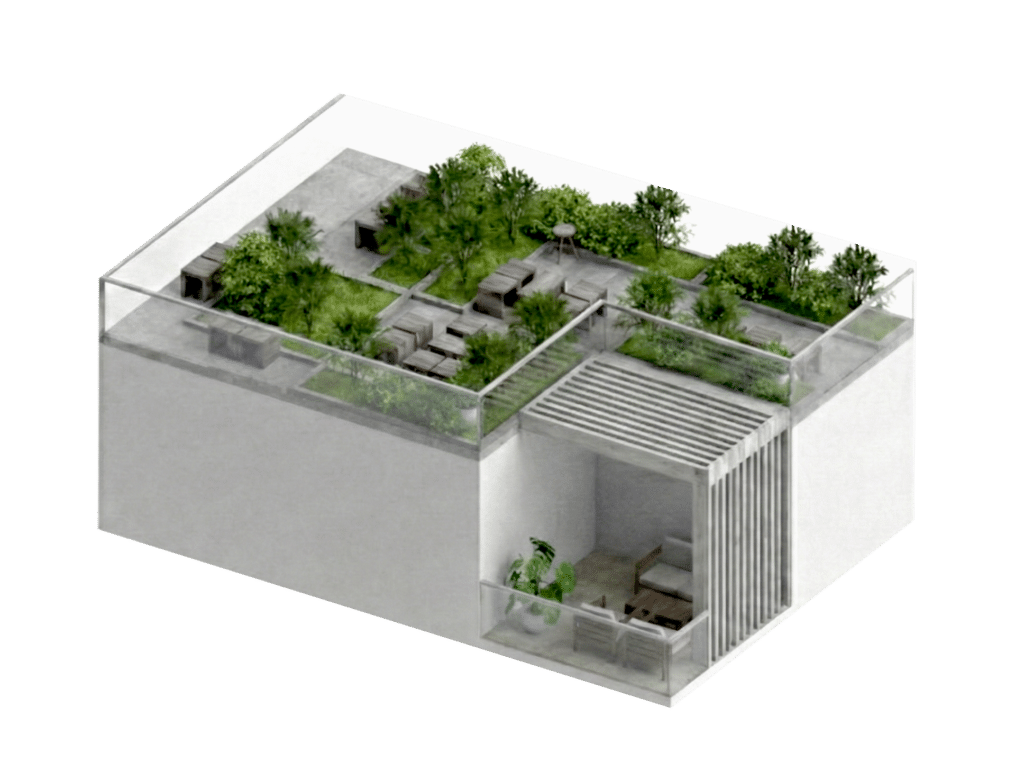
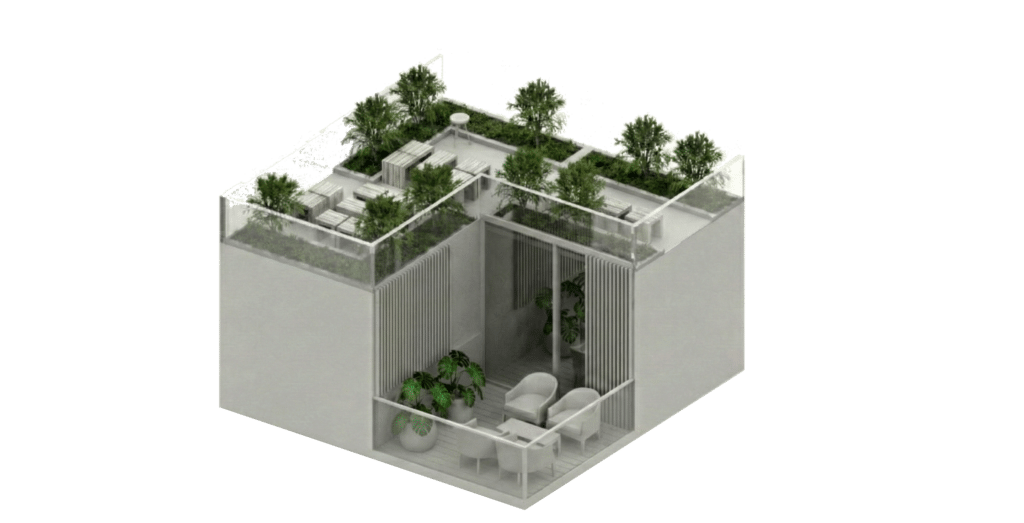
Architecture
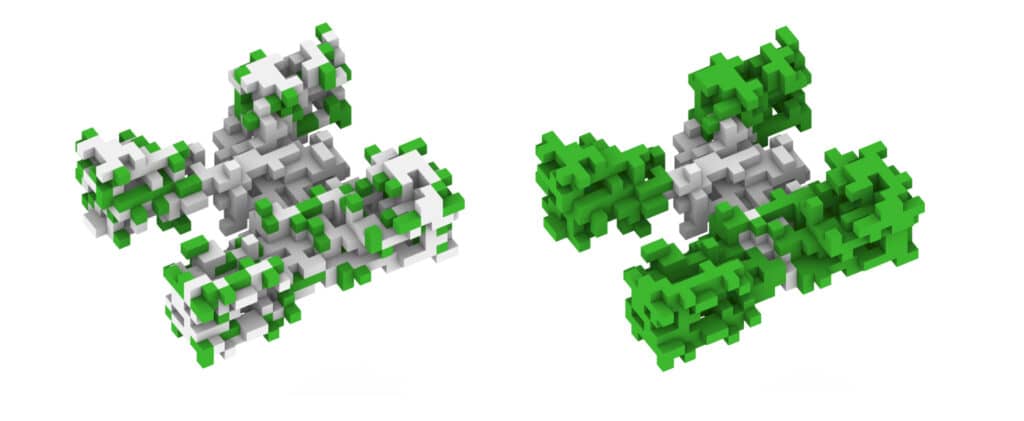
Walls Analysis
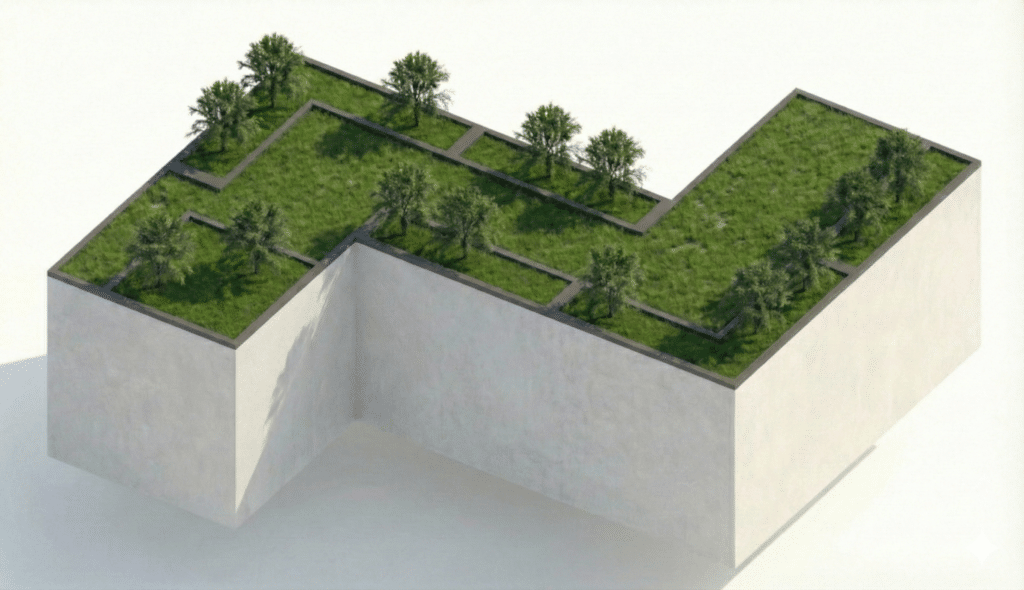
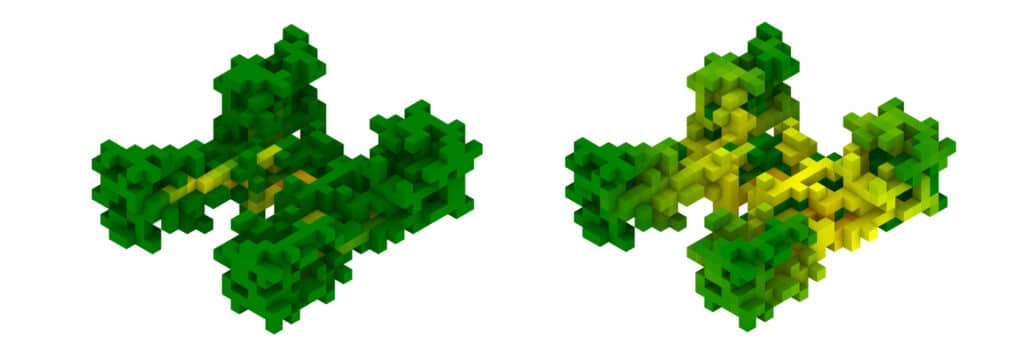
Roof Analysis
Roof| Private
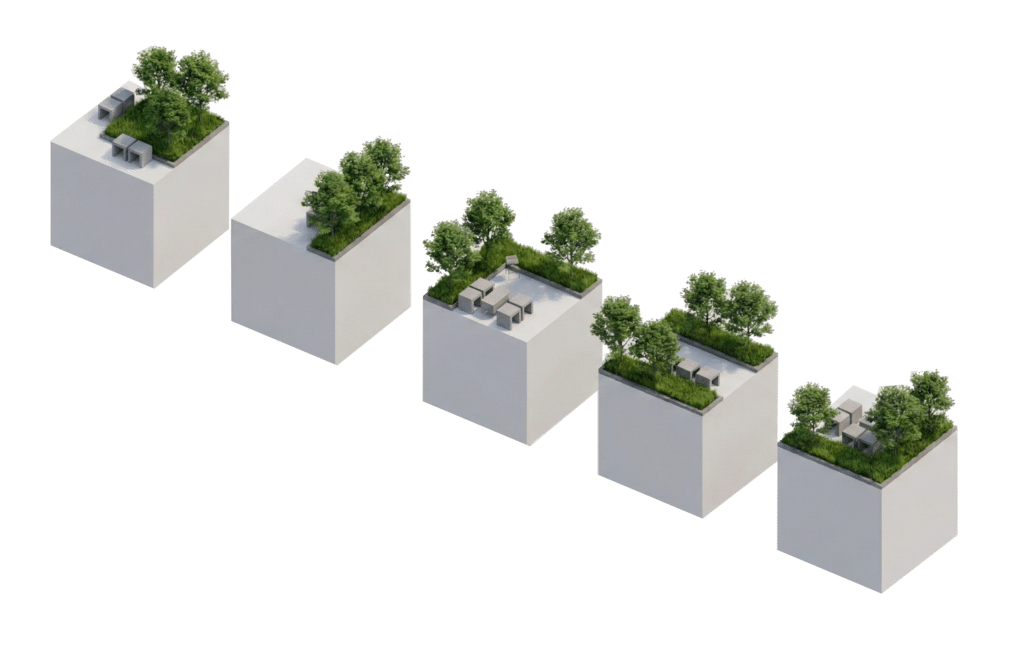
Roofs| Public
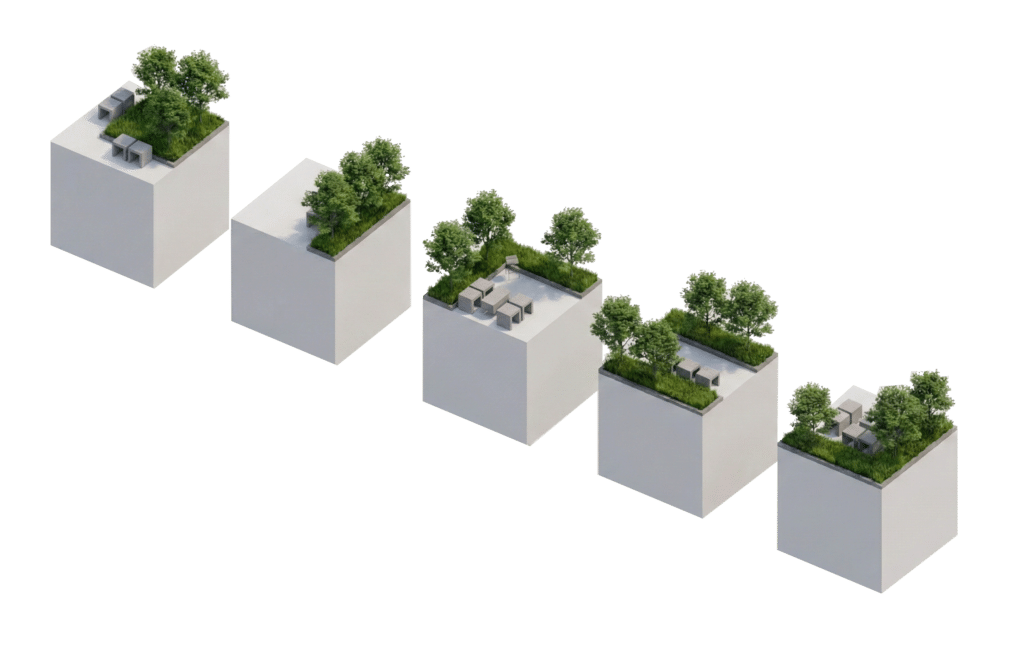
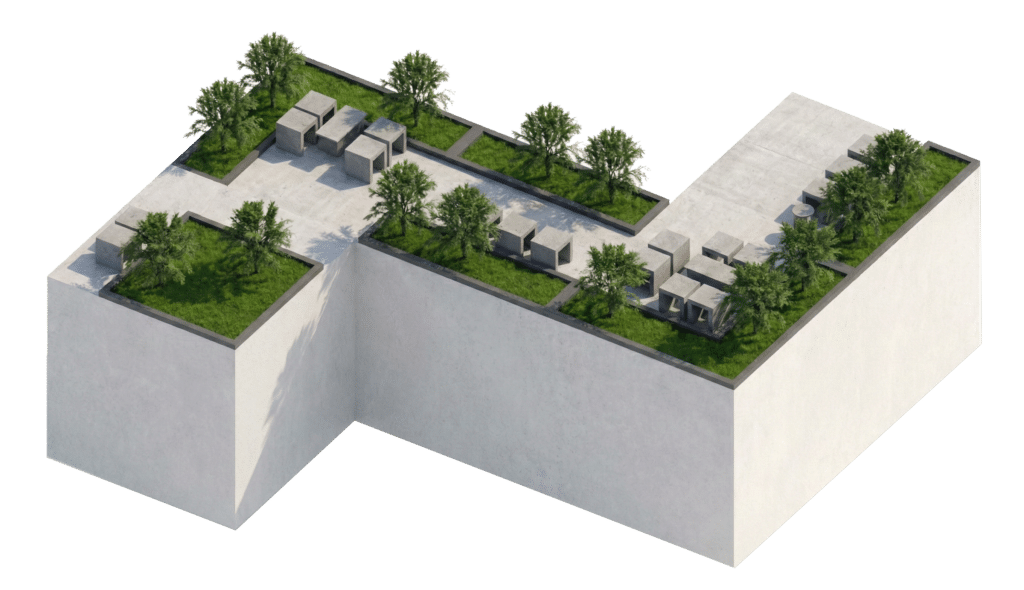
Roofs| Green