
The Master Programme in Robotics and Advanced Construction is an innovative educational format that offers interdisciplinary skills and understanding through a series of class seminars that are put into practice through hands-on workshops. IAAC gives students the opportunity to create individual studio agendas and develop Pilot Thesis Projects based on the knowledge acquired during the seminars and workshops split into 3 Modules. In this way, IAAC puts together an experimental learning environment for the training of professionals with both theoretical and practical responses to the increasing complexity of the construction sector.

Thermal Sensing for Advanced Cork Manufacturing
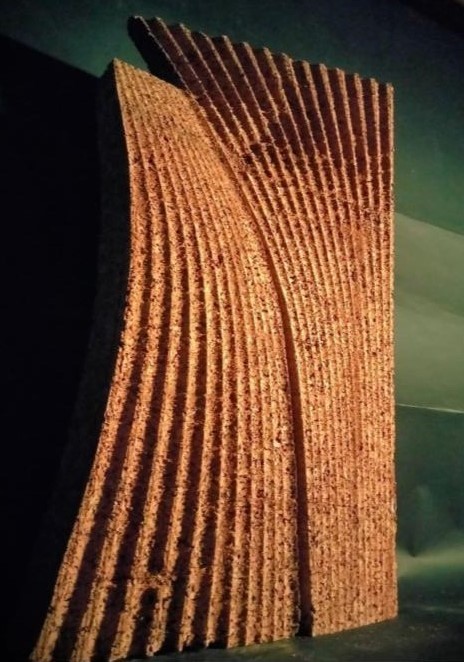
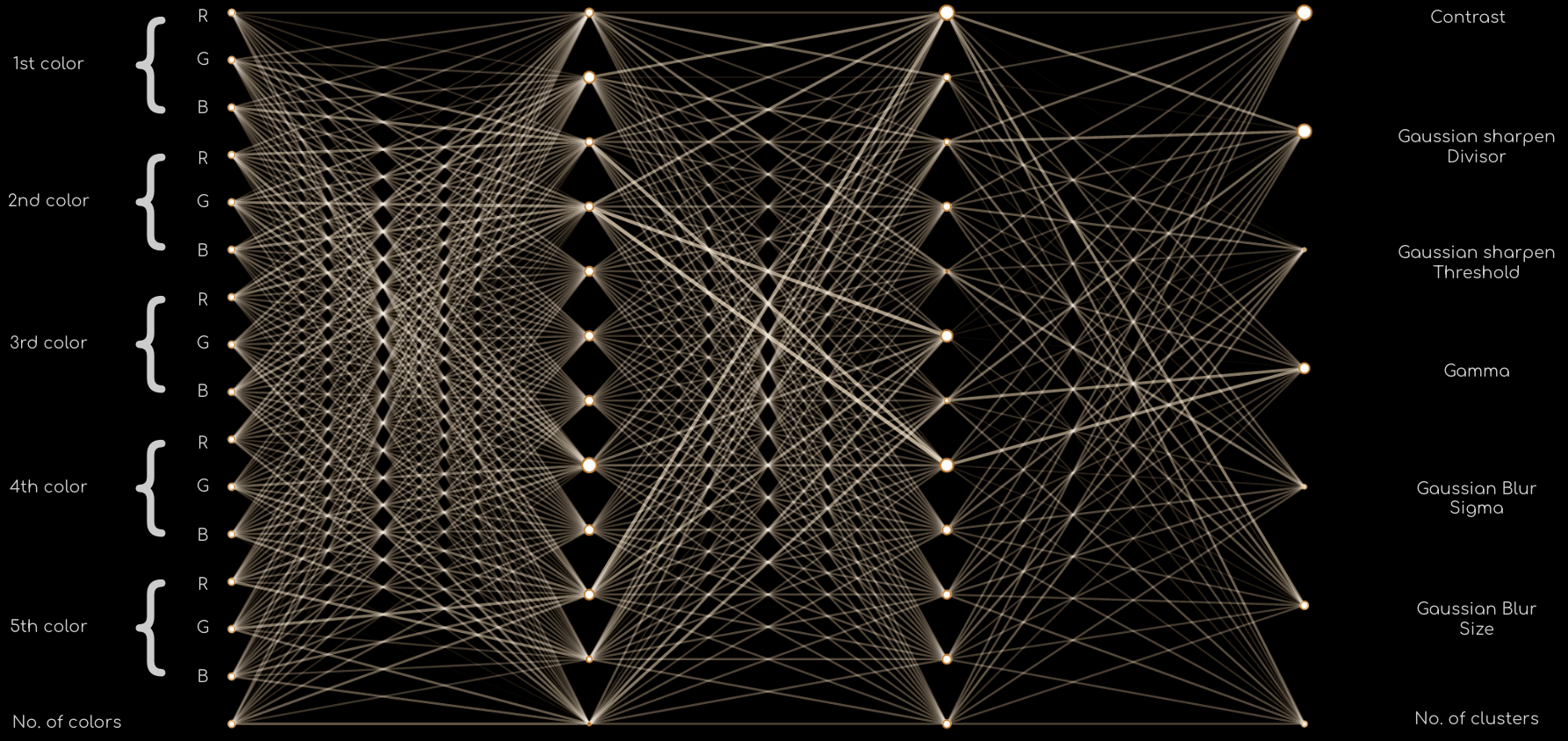
This research study delves into the realm of advanced robotics and semi-automated manufacturing processes that take into account the material properties of cork. Specifically, it explores the design and fabrication of a surface system that is optimized for both aesthetic appeal and functional performance. Building on the knowledge gained in a previous term on robotic … Read more
Thermal Rhythm

An interactive art installation that utilizes thermal imaging and real-time animation to create a captivating visual experience. The general aim of the project “Thermal Rhythm” was to generate an interactive art-wall in complete darkness which translates the human body movements into animations that controls or visualizes the emotions of the detected person through different colors … Read more
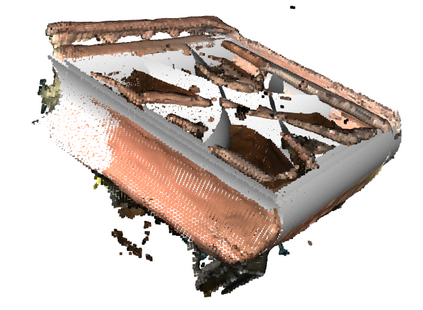
From Scans to Mesh: Exploring ROS and MoveIt
During the seminar, we explored the core concepts of ROS (Robotic Operating System), its vital tools, and the seamless integration of Python for interacting with robots. With this integration, we effortlessly processed sensor data and exercised control over the UR10e robot, which served as our platform for the seminar. Through practical exercises, we gained hands-on … Read more
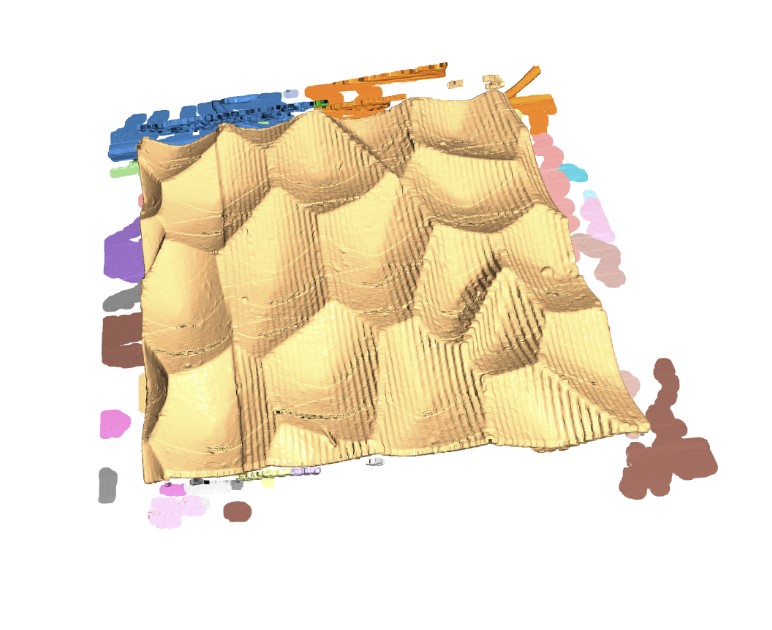
Scanning to compare clay bricks: Digital vs Real
In this course we learned about the Robotic Operating System (ROS) and the MoveIt motion planning using Python for controlling robots. We also utilized development tools such as Git and Docker for managing the data. We learned about different types of sensors which helped for the robot’s motion visualization and scanning for the purpose of … Read more
Stapler of Art

A Stapler Gun End Effector Description The project aims to deal with art in new different techniques that keeps up with the technology by getting the best of the robotic arm in a way to create staple art pieces that can achieve new ways of art depending on the robots. The main idea evolved around … Read more
A Canadian tried to make a pizza…

Robotics in food manufacture Exercise Create a moving end effector to be installed on the ABB arm robot using the actuators and electronic components reviewed in class. Inspiration Inspiration for this device stemmed from the integration of robots in the food industry. Additional inspiration was drawn from the Latching End Effector (LEE) on the Canadarm. … Read more
