YAKISUGI.TORCH

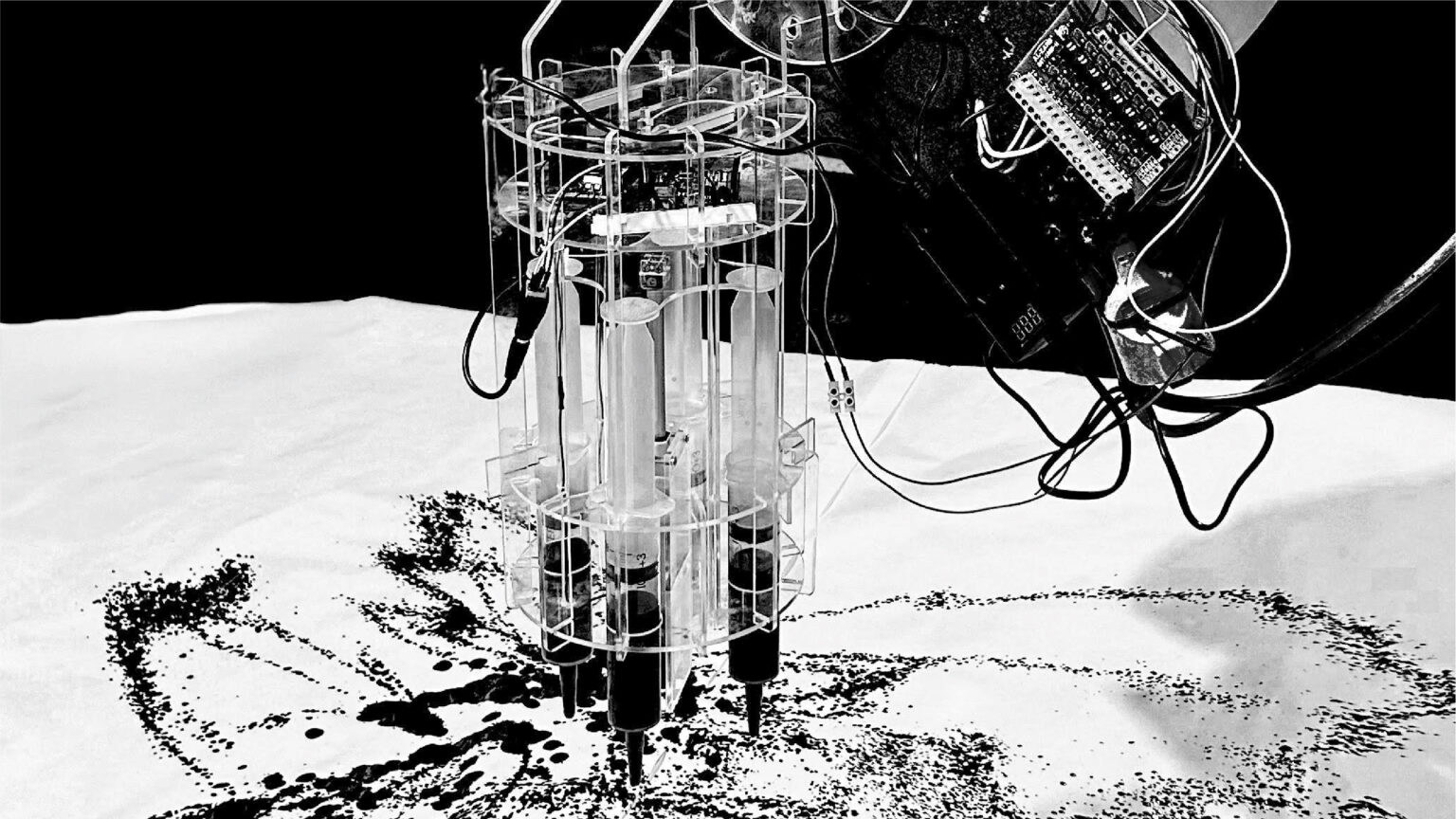
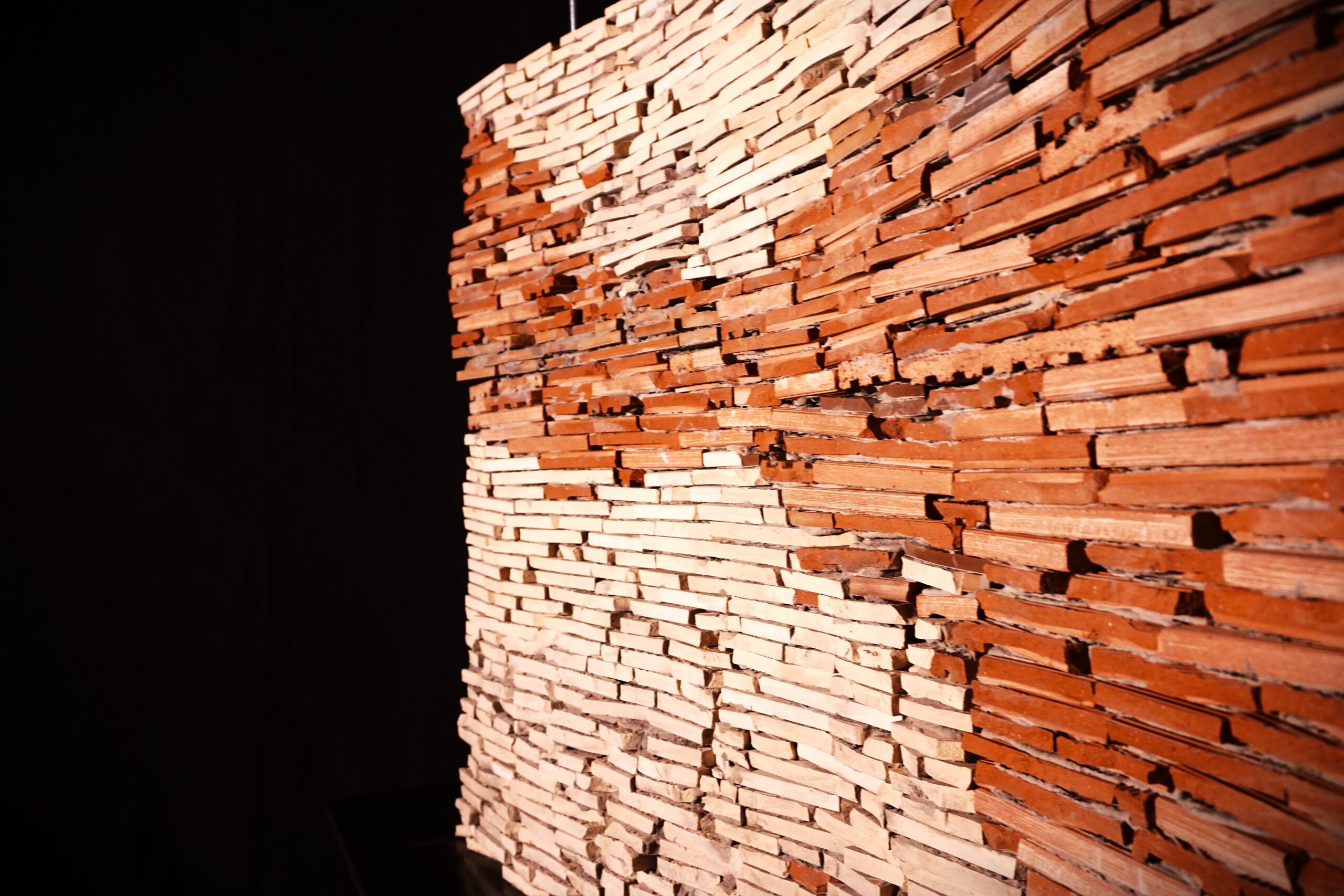
Github : https://github.com/MRAC-IAAC/YAKISUGI.TORCH Overview This project combines a thermal camera and an ESP32 to capture and analyze thermal data and distance measurements. It was developed as part of the YAKISUGI Torch Project, a system designed to optimize and standardize the traditional Japanese wood-burning technique for enhanced durability, pest resistance, and waterproofing. About the YAKISUGI Method: The YAKISUGI … Read more