Spatial Cognition in Robotics: Optimizing Construction Workflow with AI
https://www.youtube.com/watch?v=T6dt7Ft6bCs

The Master in Robotics and Advanced Construction (MRAC) seeks to train a new generation of interdisciplinary professionals who are capable of facing our growing need for a more sustainable and optimised construction ecosystem. The Master is focused on the emerging design and market opportunities arising from novel robotic and advanced manufacturing systems.
Through a mixture of seminars, workshops, and studio projects, the master programme challenges the traditional processes in the Construction Sector. It investigates how advances in robotics and digital fabrication tools change the way we build and develop processes and design tools for such new production methods.
As businesses evolve in the 21st century, success is no longer measured by profit alone. Today, organizations are expected to create meaningful value for people, the planet, and the broader economy. The Sustainable Business Canvas is a strategic tool that helps businesses embed sustainability at the core of their operations by assessing not just economic … Read more
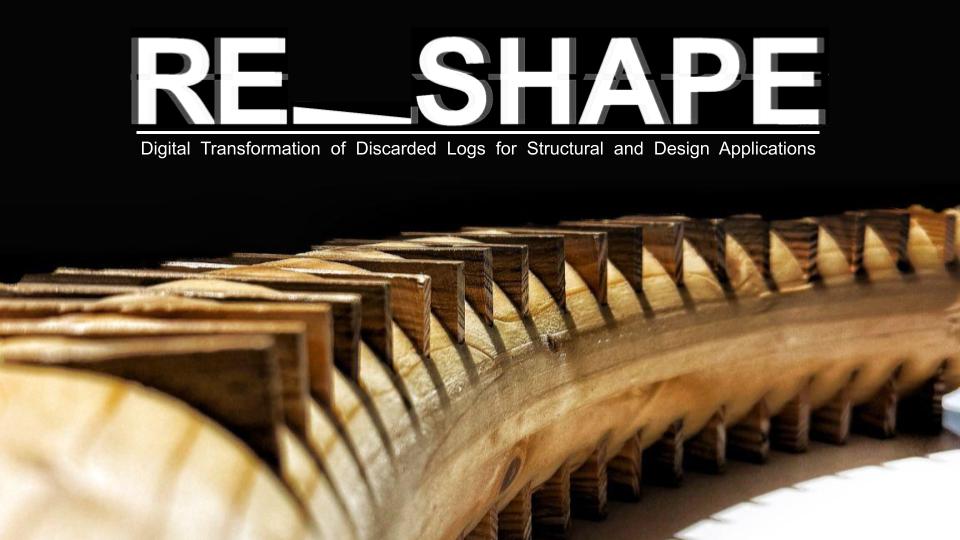
Digital Transformation of Discarded Logs for Structural and Design Applications Re_Shape is a design and innovation project that addresses a major blind spot in the forestry industry: the waste of tree trunks that are curved, bifurcated, or otherwise irregular and therefore excluded from traditional processing systems. These logs are typically downgraded into low-value products like … Read more
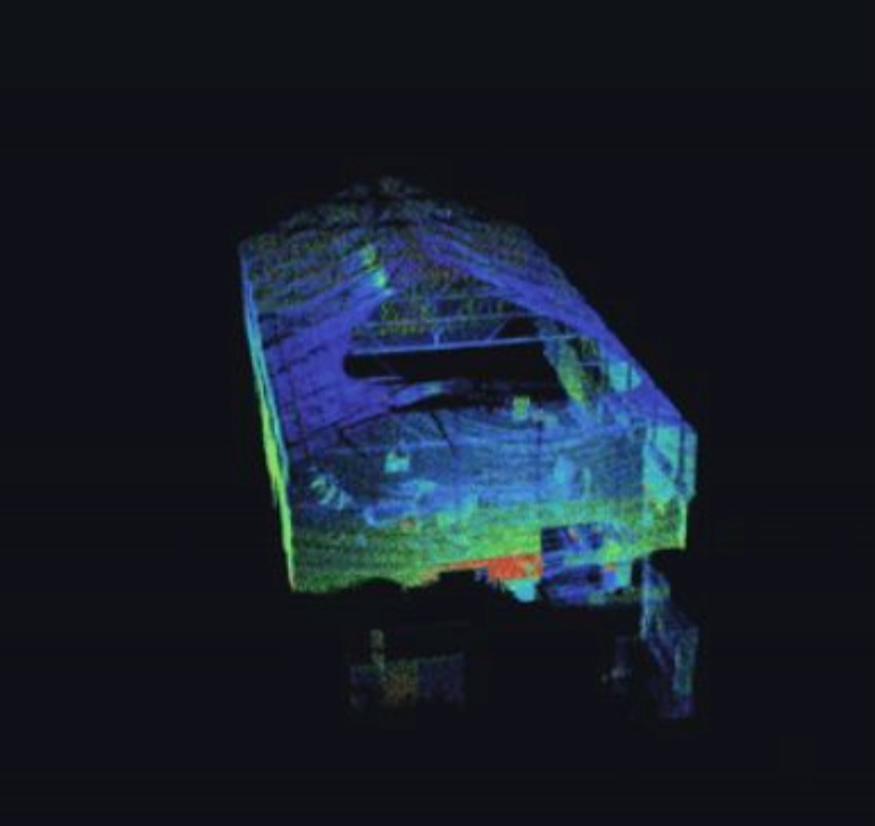
Introduction In the face of increasing climate-related disasters, accurate and efficient scanning methods are essential for assessing structural integrity. Our team developed a robotic scanning solution that utilizes LiDAR-based Husky A200 and drone photogrammetry to detect roof anomalies, such as holes and structural weaknesses.This study explores different scanning methodologies and evaluates their effectiveness in detecting … Read more
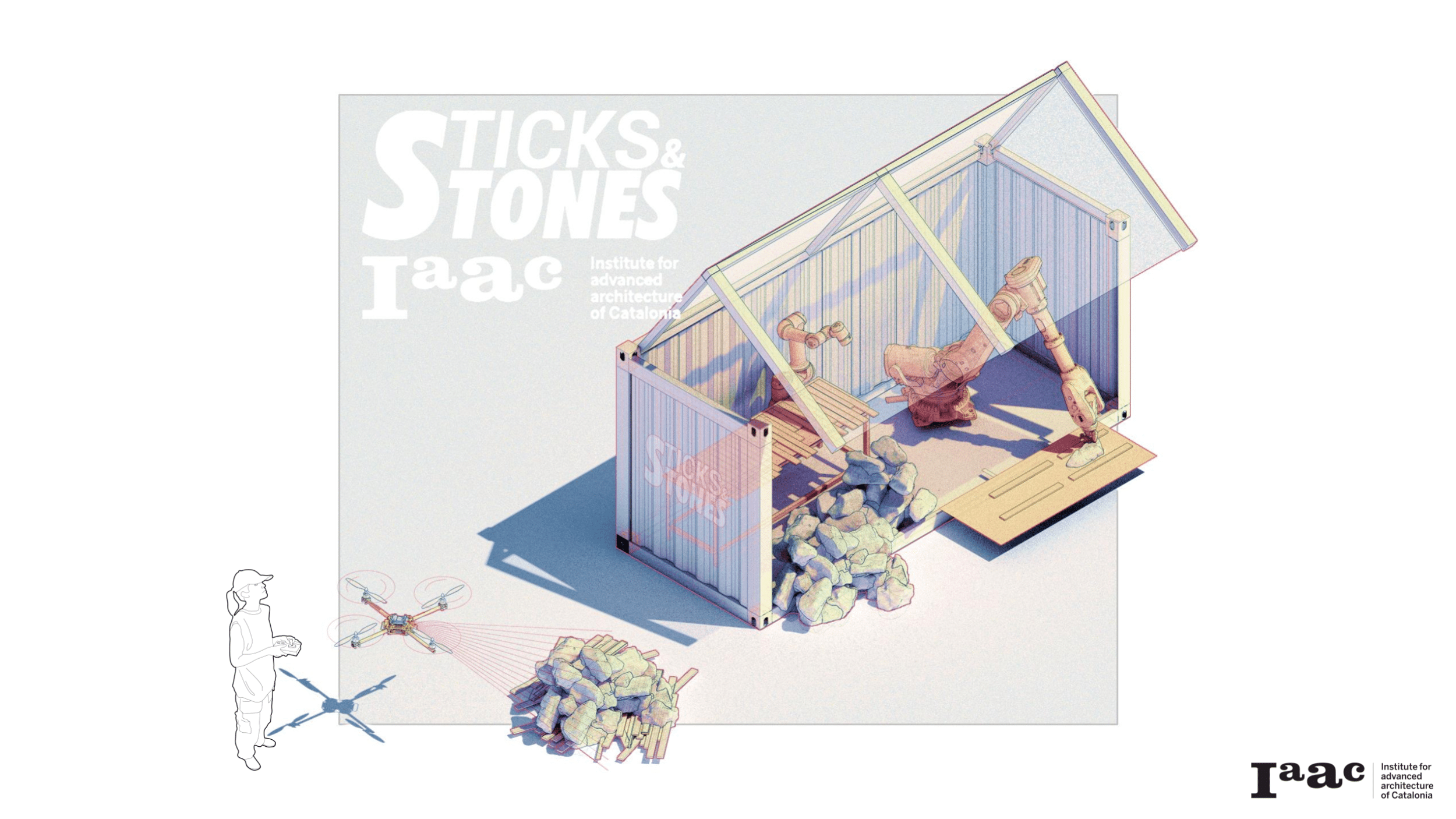
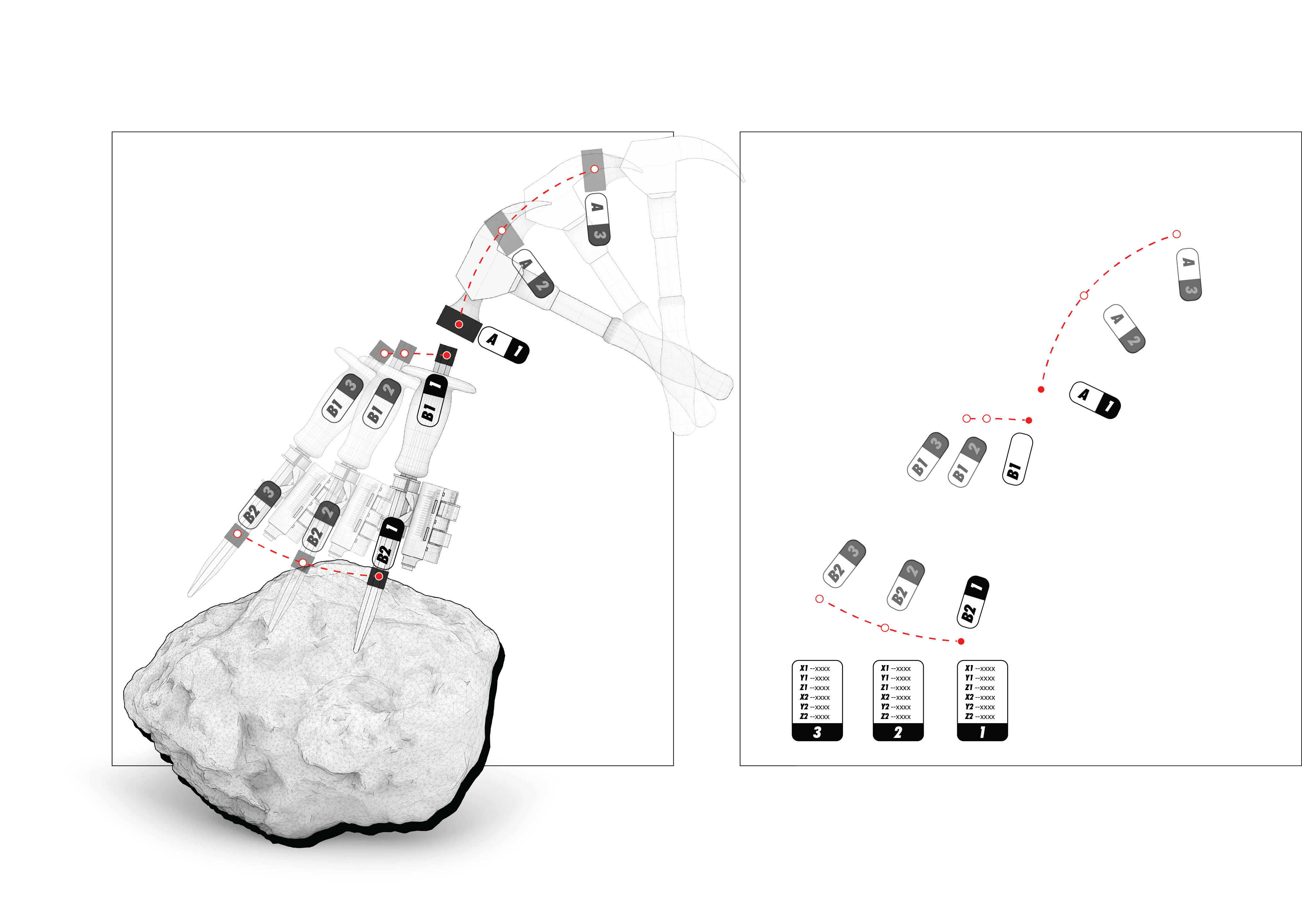
Mobile Robotic Scanning & Discrete Element Analysis This workshop served as an introduction to mobile robotics for scanning. We explored various types of mobile robots and different kinds of sensors, focusing on how they integrate with one another to enable diverse scanning approaches. Based on these investigations, we designed a specific scanning methodology suited to … Read more
Github : https://github.com/j-albo/robotic-3d-space-analysis INTRODUCTION Scanning irregular terrains with today’s scanning technology is crucial for obtaining precise environmental models, optimizing planning and execution in architectural projects. Its high-resolution capture capability allows for mapping complex surfaces and detecting floor level variations imperceptible to the human eye, improving efficiency and reducing errors in design and construction. WHY USING A MOBILE … Read more
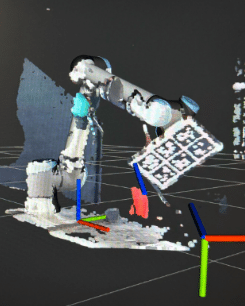
ROS-Based UR Scan ApproachUR10e Reconstruction: Integrating Robotics, 3D Scanning, and Precision Fabrication This post presents the UR10e Industrial Reconstruction Controller, developed for the MRAC24/25 program at IAAC. Our team—Santosh Prabhu, Nacho Monereo, and Neil Trouw—has built a system architecture that synchronizes a UR10e robot, depth sensors, and a Dockerized ROS environment to capture and reconstruct … Read more
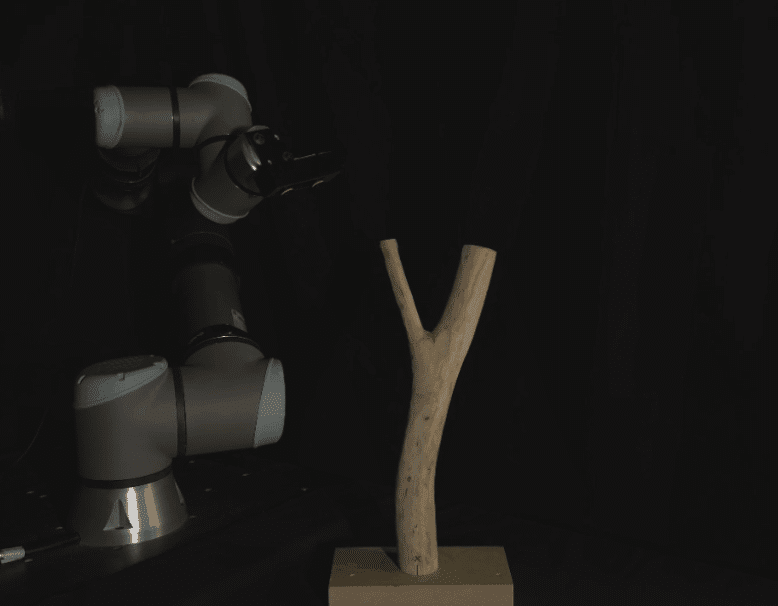
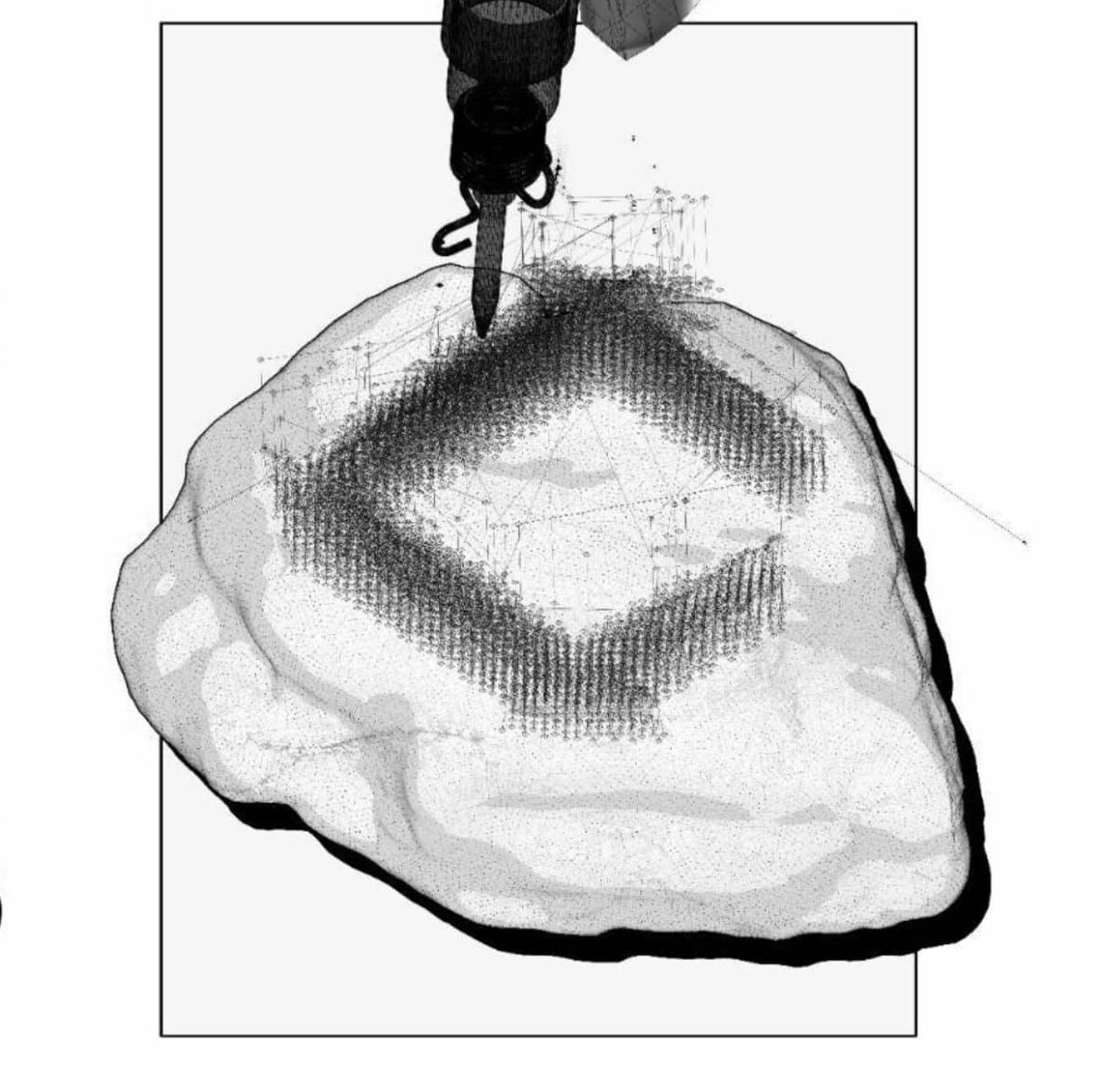
Github : https://github.com/j-albo/scanning-wood-waste INTRODUCTION Currently, only 15% of wood waste is recycled globally, while up to 60% of felled trees remain unused. Many irregular pieces that do not meet industrial standards are discarded without leveraging their structural and aesthetic potential. Our goal is to rethink these waste materials through scanning, analysis, and digital transformation, converting them into … Read more
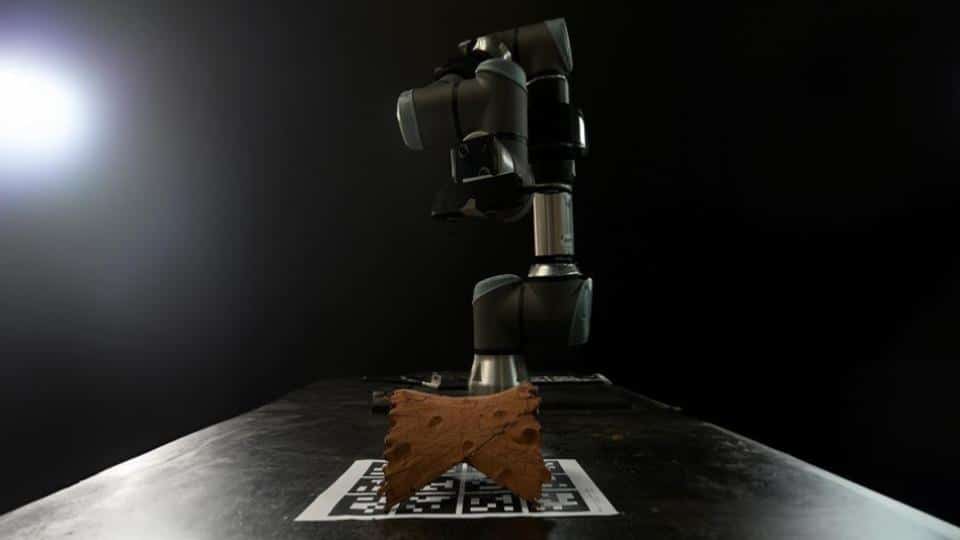
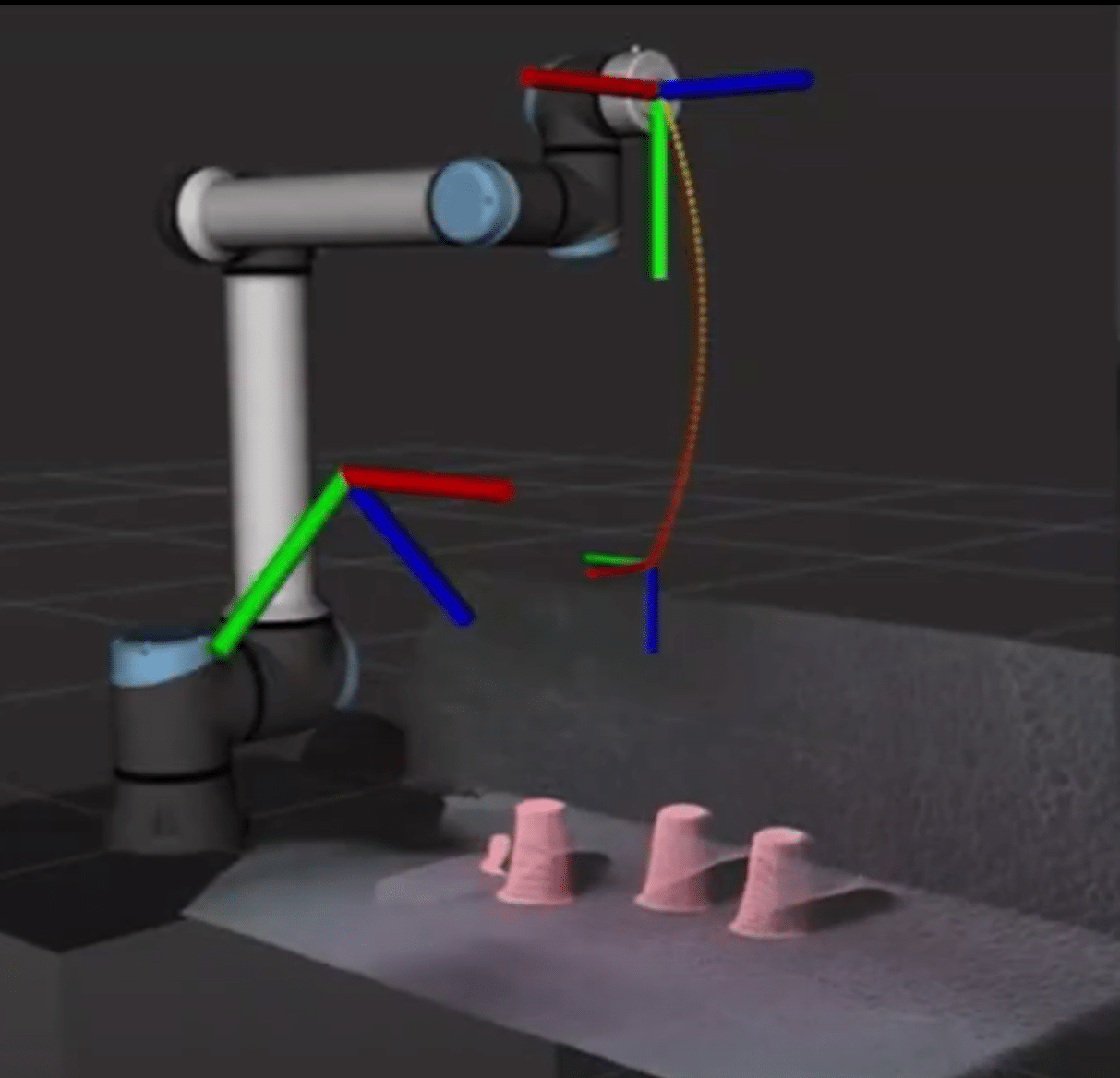
Introduction In this exercise, our objective was to scan a physical object and use the acquired data to generate a toolpath for non-planar 3D printing. To achieve this, we integrated tools such as Grasshopper, Python, and ROS (Robot Operating System) and conducted multiple tests to optimize the scanning strategy and post-processing. Methodology To achieve non-planar … Read more
Introduction to Robotic Operating Systems Github repository: https://github.com/sashakraeva/MRAC-ur-perception Introduction his course provided a thorough introduction to the Robot Operating System (ROS), teaching us essential skills in robotic software development. We learned about key ROS concepts like nodes, topics, messages, and services. Using robotic perception as case studies, we understood how ROS connected robots, sensors, and … Read more

with Theophile Peju + Alfredo Chavez, Heatherwick Studio OBJECTIVE Ceramic tile manufacturing is a craft that requires a level of customization per client, and also replication per project. An original tile finish may be created once, replicated over thousands of tiles. In this industry, replication requires precision, refinement, tactile quality, and efficiency. This creates a … Read more

Introduction The exploration of robotic fabrication with traditional techniques has become increasingly important in the ceramic industry, opening up new possibilities for innovation, efficiency and mass production. This research, in collaboration with Heatherwick Studio, bridges traditional artistry and robotic innovation, using only a fan brush to explore creative possibilities in ceramic glazing. Design Methodology The … Read more
Introduction This project was done in collaboration with Heatherwick Studio. Our starting point was a problem that emerged when patterned ceramic tiles were deployed at scale. Specifically, factory-produced tiles create repetitive patterns, which detract from their crafted intricacy. On the other end of the spectrum, hand glazing is a highly skilled and time-consuming process that … Read more
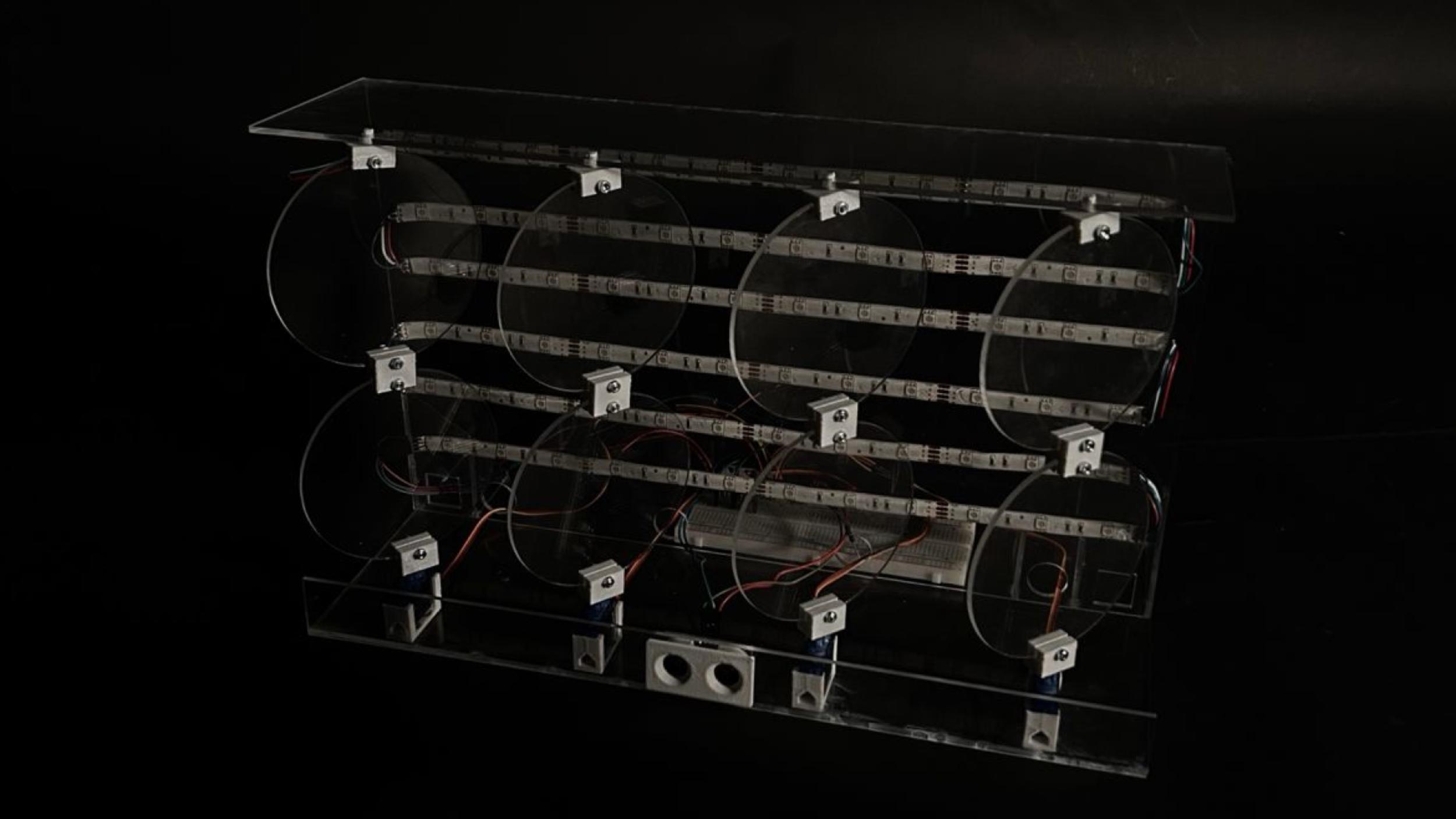
Github: https://github.com/elicolds/emotionreader/ Introduction In the realm of architecture and art, installations serve as powerful mediums to explore the intersection of technology, human emotion, and design. Our project reimagines the relationship between viewers and spaces by creating an interactive structure that reacts dynamically to human presence and emotions. Combining hardware, software, and creative ingenuity, we designed … Read more
github: https://github.com/intellection-mrac/tres_mosqueteros.git 1. Intro When we think of craftsmanship, we imagine a world of deep expertise—one that is developed differently from the academic theories taught in universities. Craftspeople spend years under the guidance of masters, becoming part of a lineage that passes down specialized knowledge honed through time and experience. This process is more than … Read more

Github : https://github.com/MRAC-IAAC/YAKISUGI.TORCH Overview This project combines a thermal camera and an ESP32 to capture and analyze thermal data and distance measurements. It was developed as part of the YAKISUGI Torch Project, a system designed to optimize and standardize the traditional Japanese wood-burning technique for enhanced durability, pest resistance, and waterproofing. About the YAKISUGI Method: The YAKISUGI … Read more
