
Introduction
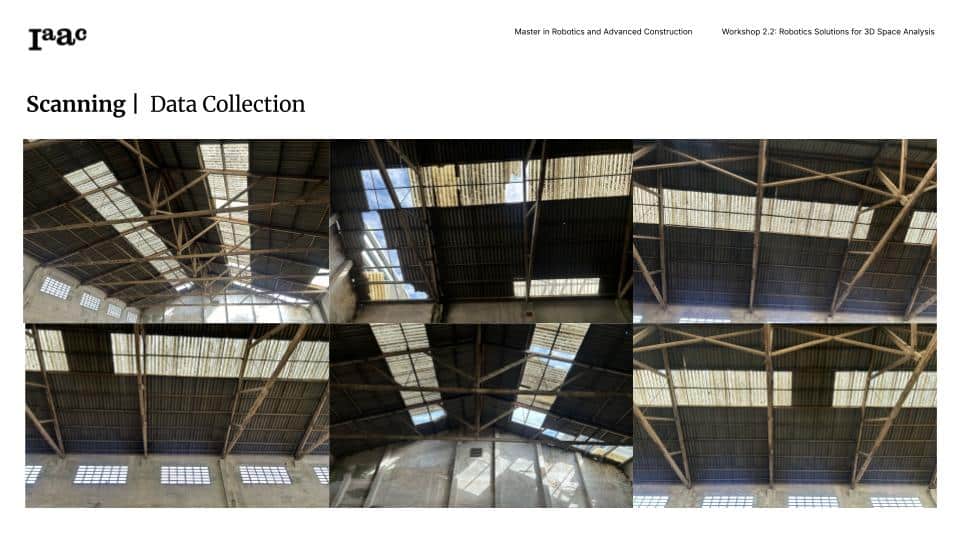
In the face of increasing climate-related disasters, accurate and efficient scanning methods are essential for assessing structural integrity. Our team developed a robotic scanning solution that utilizes LiDAR-based Husky A200 and drone photogrammetry to detect roof anomalies, such as holes and structural weaknesses.
This study explores different scanning methodologies and evaluates their effectiveness in detecting anomalies in post-disaster environments.
Exploring Different Scanning Methods
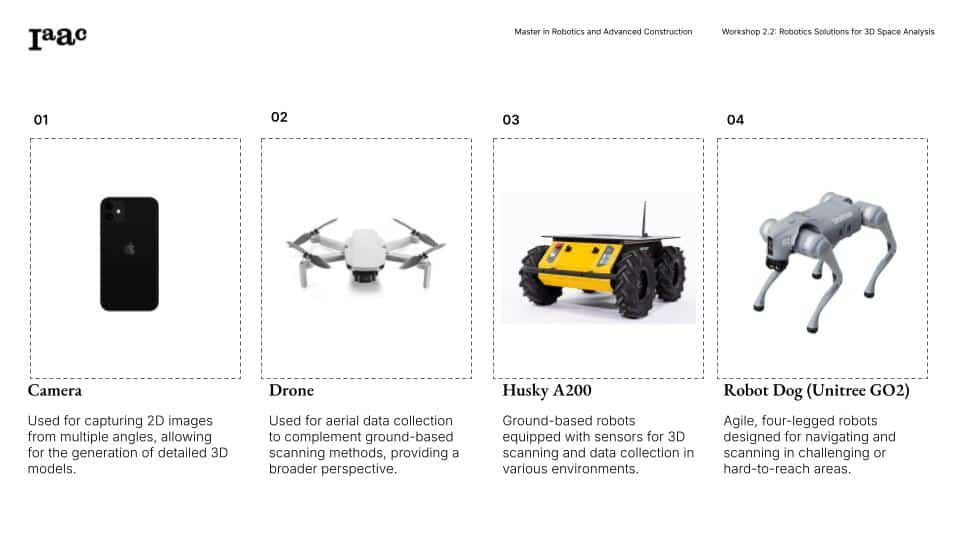
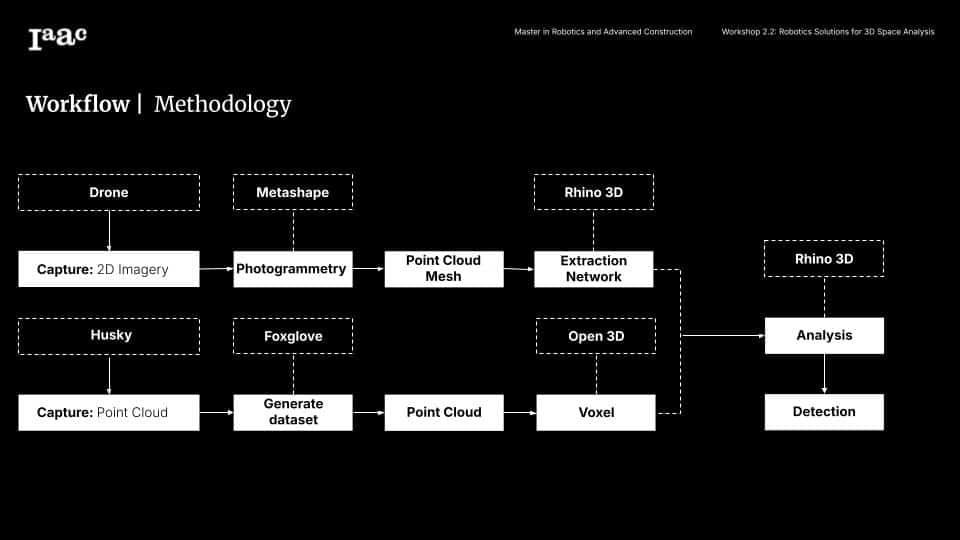
There are several scanning methods used for 3D space analysis and anomaly detection, each with distinct advantages. Photogrammetry, using a camera or drone, captures 2D imagery from multiple angles and processes it into a 3D model—ideal for visual reconstruction but less effective in detecting structural anomalies. LiDAR-based scanning, as used in the Husky A200 and robot dog (Unitree GO2), generates high-precision point clouds by measuring distances with laser pulses, making it highly accurate for detecting holes, structural weaknesses, and spatial mapping. The robot dog, with its mobility, is particularly useful for scanning hard-to-reach or uneven terrains, while ground-based robots like Husky excel in large, open environments with clear toolpaths.
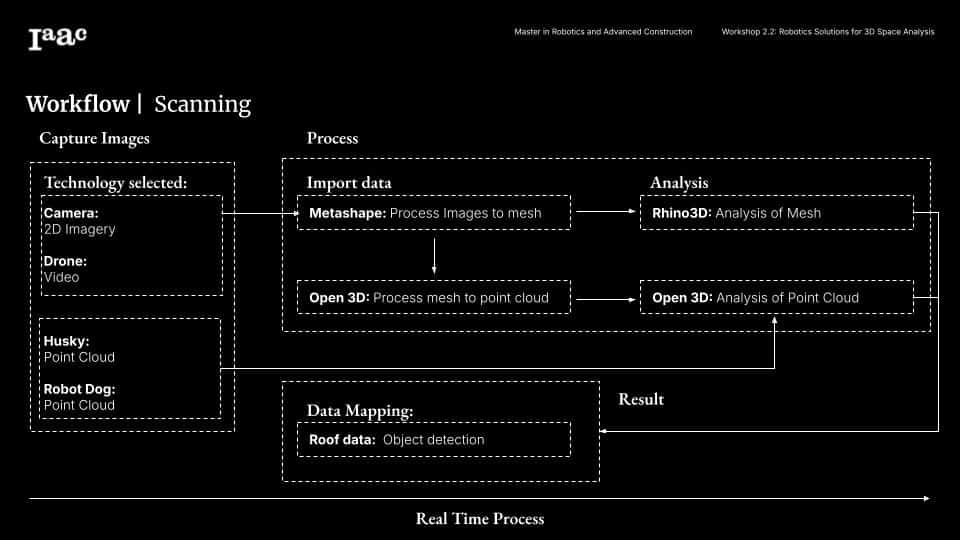
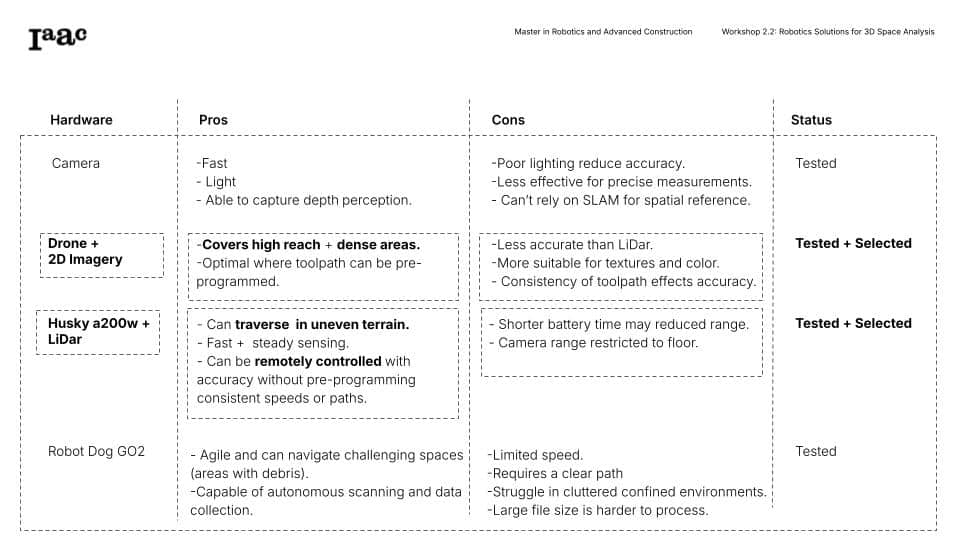
Different methodologies were tested and based in our firs experiments, we decided to test in the project the scanning methodologies of the drone scanning and the husky a200.
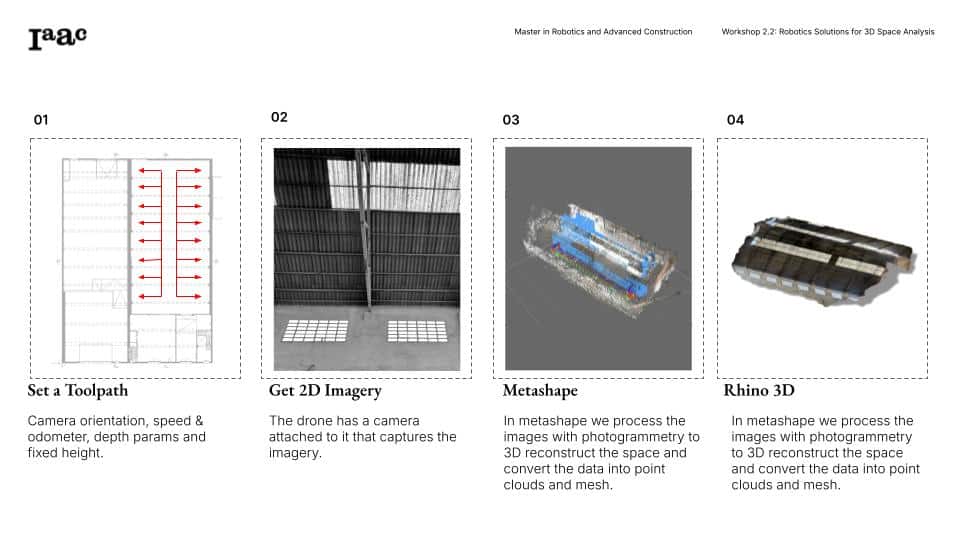
Photogrammetry (drone based scanning)
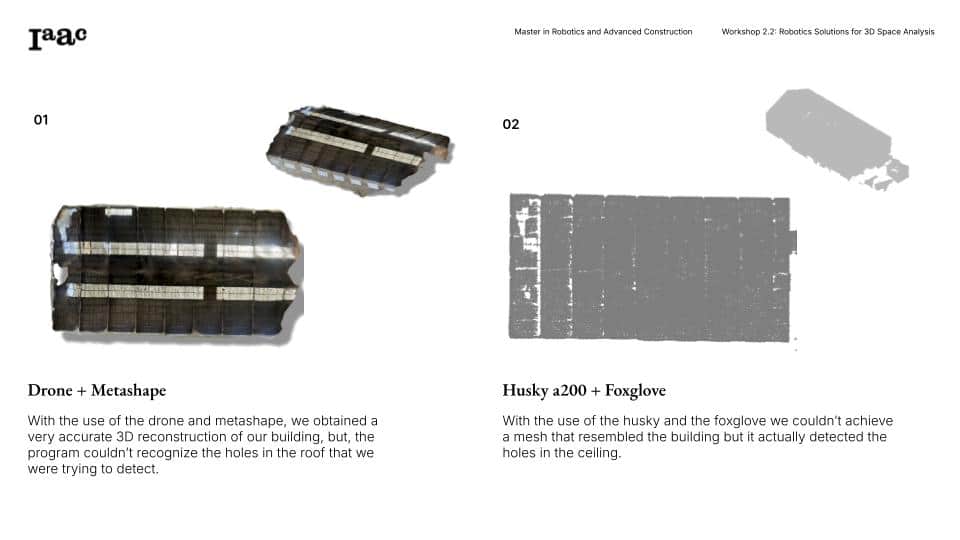
Photogrammetry is a method that uses 2D imagery from drones to generate 3D models of buildings. By capturing multiple images from different angles and processing them with Metashape, we can create detailed 3D reconstructions.

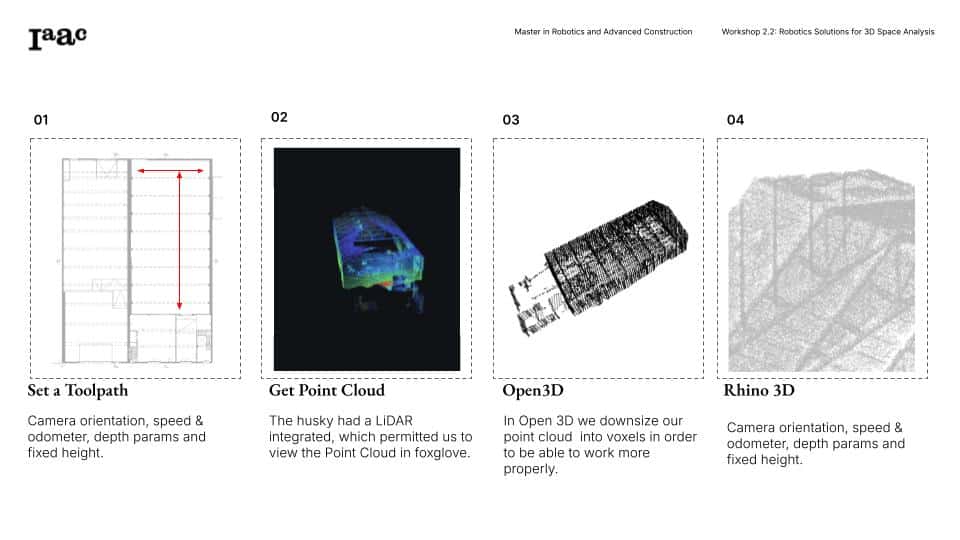
LiDAR based scanning (Husky A200)
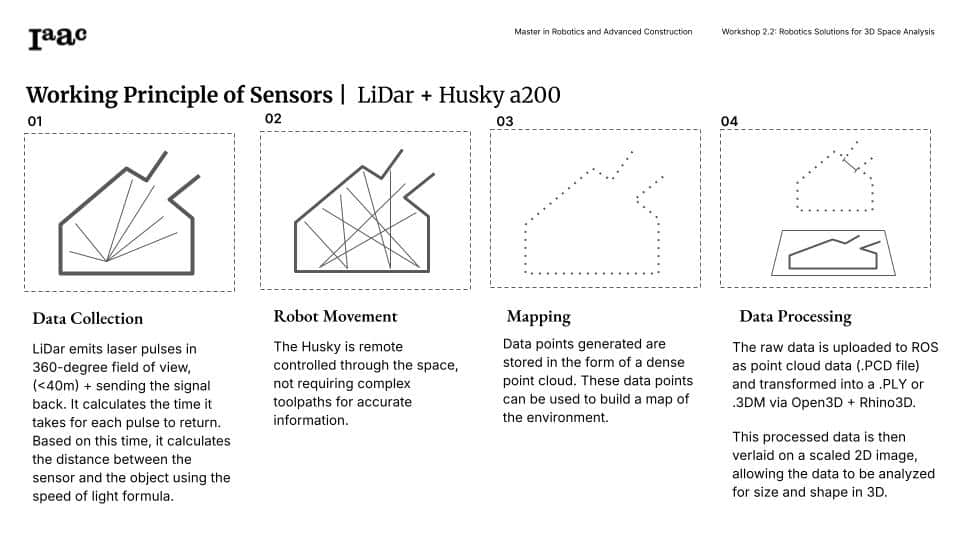
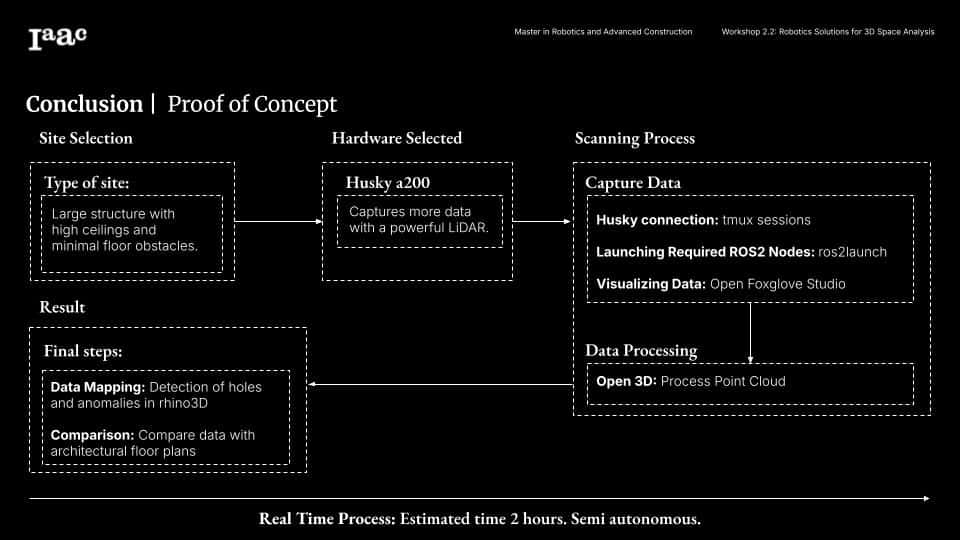
Unlike photogrammetry, LiDAR (Light Detection and Ranging) uses laser pulses to generate precise point clouds of an environment. The Husky A200, equipped with a powerful MID-360 LiDAR sensor, was used to map and detect anomalies in roofs with high accuracy.
Selecting the best Scanning Method
Although the data from the drone was easier to synthesize, we chose to analyze the data collected from the Husky a200 using LiDar because it was most expeditious in gathering accurate + detailed data for anomalies + openings in the roof.
Roof Anomaly Detection
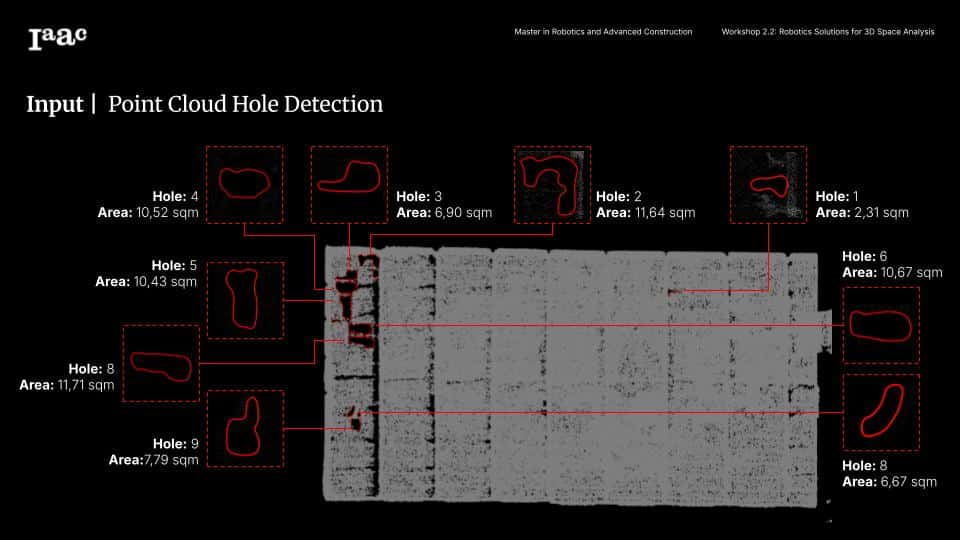
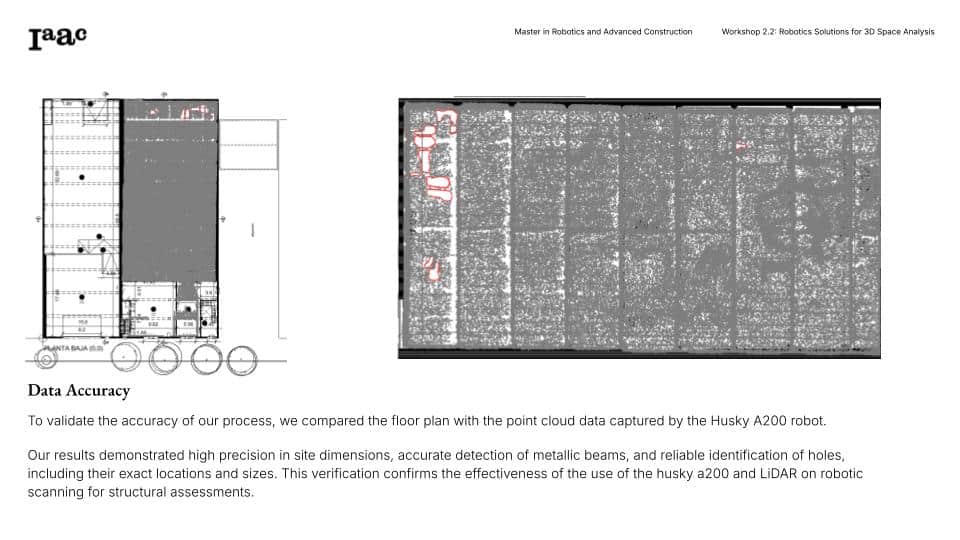
Following the completion of the scanning and the digital reconstruction of the building, our attention shifted towards the analysis and data extraction of anomalies on the roof. This step was critical for developing a comprehensive plan for a full-proof creating a disaster relief solution when it comes to the amendment/reconstruction of buildings. Without having physical access to the roof, the robot + scanning equipment provided enabled our team to use multiple methods of gathering data. The software used allowed us assess the roof condition and determine the size and quantity of material needed to repair the roof.
Conclusions
Husky A200 with LiDAR is the best option for roof anomaly detection due to its precision and autonomy. Drone photogrammetry is useful for visualizing overall structures and setting the LiDar point cloud to scale, but lacks hole-detection accuracy. The combination of both methods would provide the most comprehensive building assessment.
Next Steps & Potential Applications
Post-disaster assessment → Quickly detect damage in buildings after earthquakes or storms
Building maintenance → Identify structural weaknesses in commercial and industrial buildings
Automation & AI integration → Future upgrades could include autonomous scanning and AI-based damage analysis
Enhance Husky’s real-time data processing to improve speed
Integrate AI-driven navigation for full autonomy
Explore alternative scanning technologies (thermal imaging, radar, advanced photogrammetry)
