
Mapping out Spatial Intelligence
Program: Master in AI for Architecture and the Built Environment (MaAI)
Supervisor: Wassim Jabi
Motion Pixels is a research project that explores how pedestrian movement can be transformed into spatial intelligence. By combining computer vision, trajectory analysis, behavioral mapping, and machine learning, the project converts video recordings of public spaces into spatial diagrams, behavior maps, and predictive movement models. Using a dataset collected across multiple urban locations in Barcelona, Motion Pixels investigates how human behavior reveals the hidden logic of the built environment. Rather than treating movement as a byproduct of architecture, the research positions it as a measurable layer of feedback, one that can help designers better understand how space is actually experienced, occupied, and navigated. Ultimately, the project proposes a new approach to architectural analysis, where observation, behavior, and prediction become tools for informing future spatial design.
Preface // The Flaw in the Plan


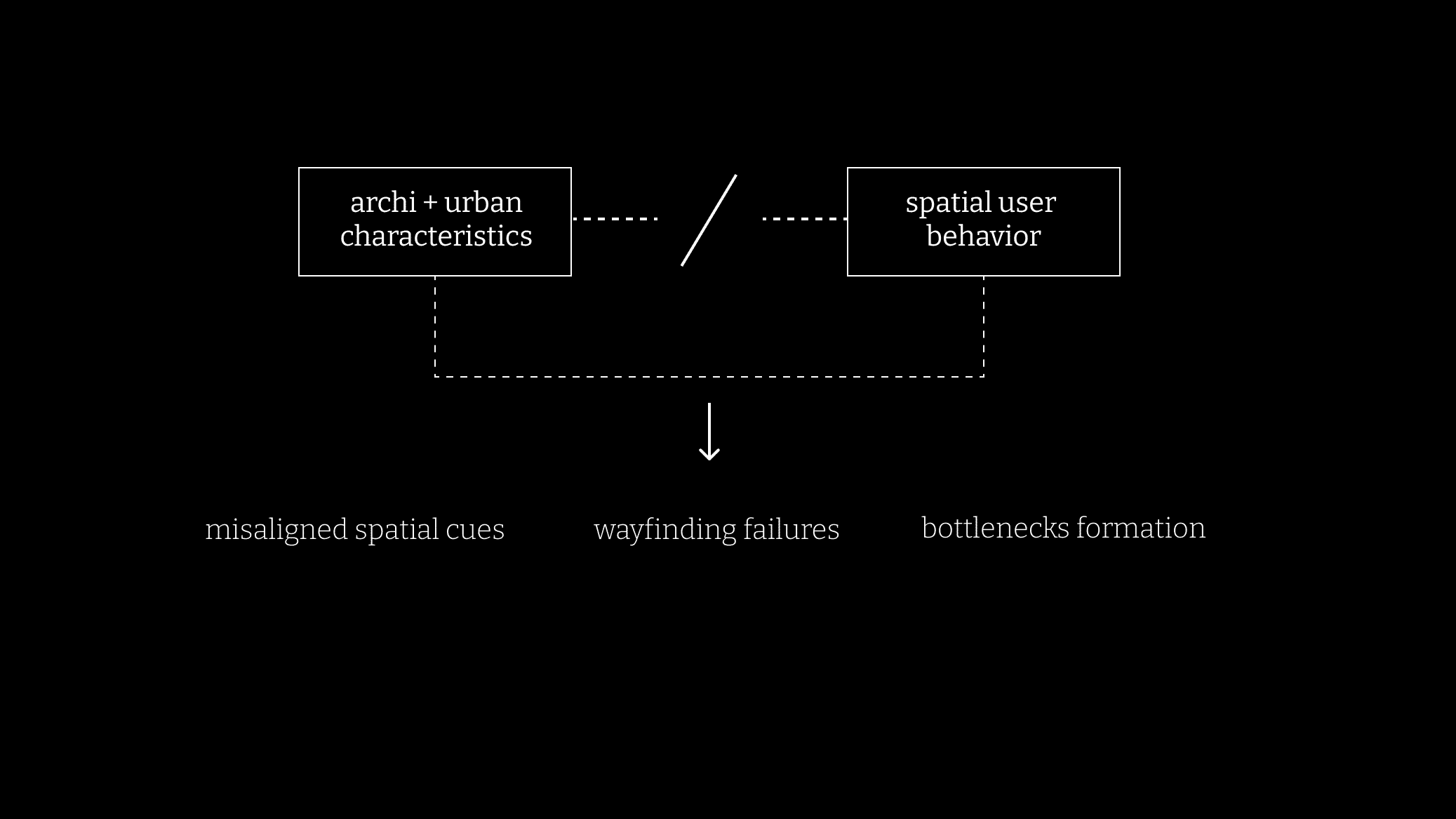
Architecture is often designed through drawings, diagrams, and planned circulation paths. Yet real human behavior rarely follows these intentions precisely.
Across cities, people continuously negotiate space. They create shortcuts through landscapes, occupy unexpected areas, and generate movement patterns that differ from those anticipated by designers.
These deviations reveal an important condition of the built environment: Spaces are designed, but behavior is negotiated.
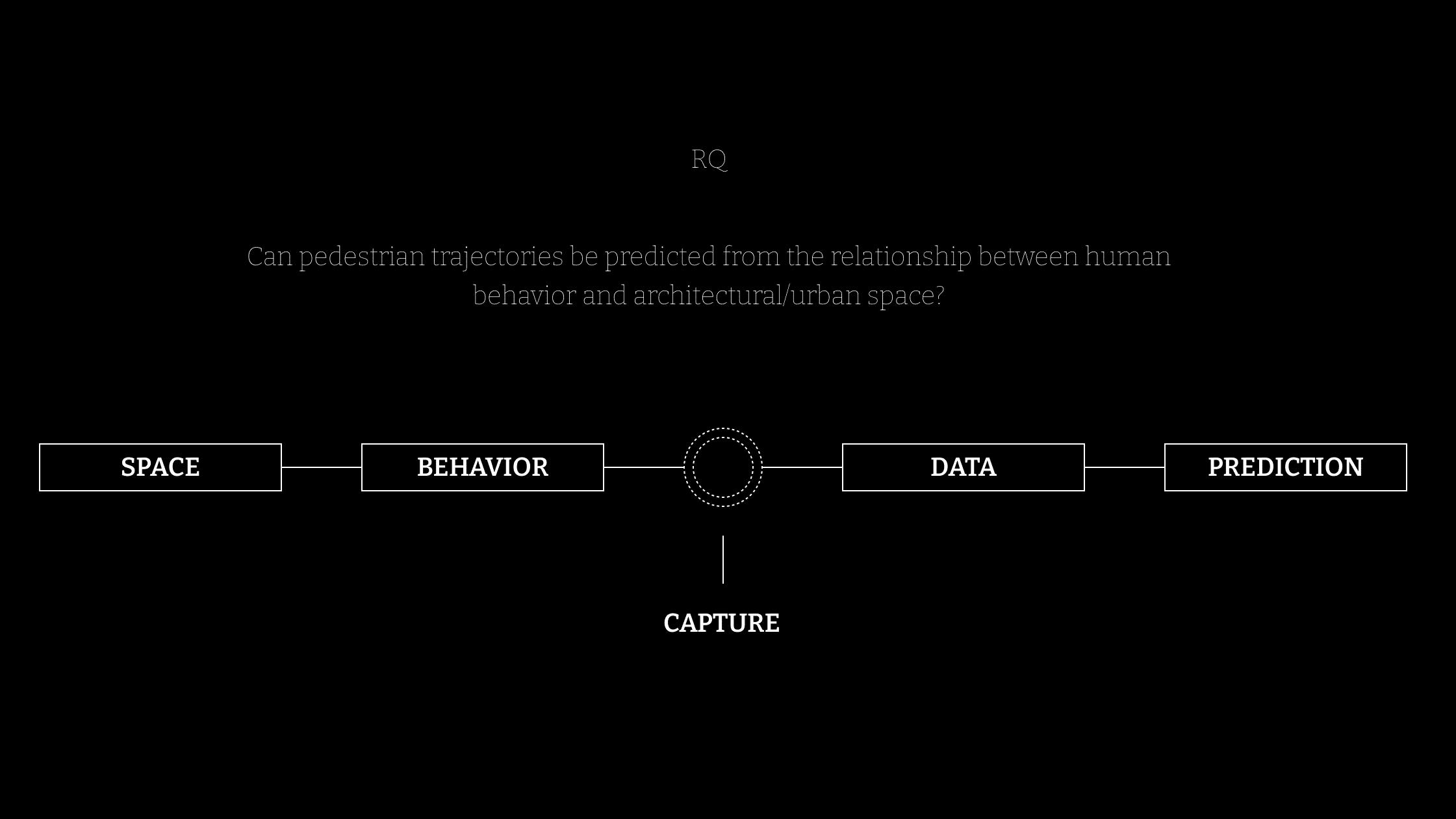
This observation became the starting point of Motion Pixels. The project investigates whether pedestrian movement can be systematically captured, analyzed, and translated into a new form of architectural representation capable of revealing the relationship between space and behavior.
Motion Pixels operates at the intersection of three domains:
- Space Syntax and spatial analysis
- Behavioral and trajectory research
- Simulation and infrastructure planning software
Existing approaches explain movement, measure movement, or simulate movement.
However, few systems establish a direct connection between observed pedestrian behavior, architectural representation, and predictive intelligence.
Motion Pixels positions itself within this gap by introducing a workflow capable of transforming real-world pedestrian footage into spatially meaningful predictions and visualizations.
Pipeline + Prototype
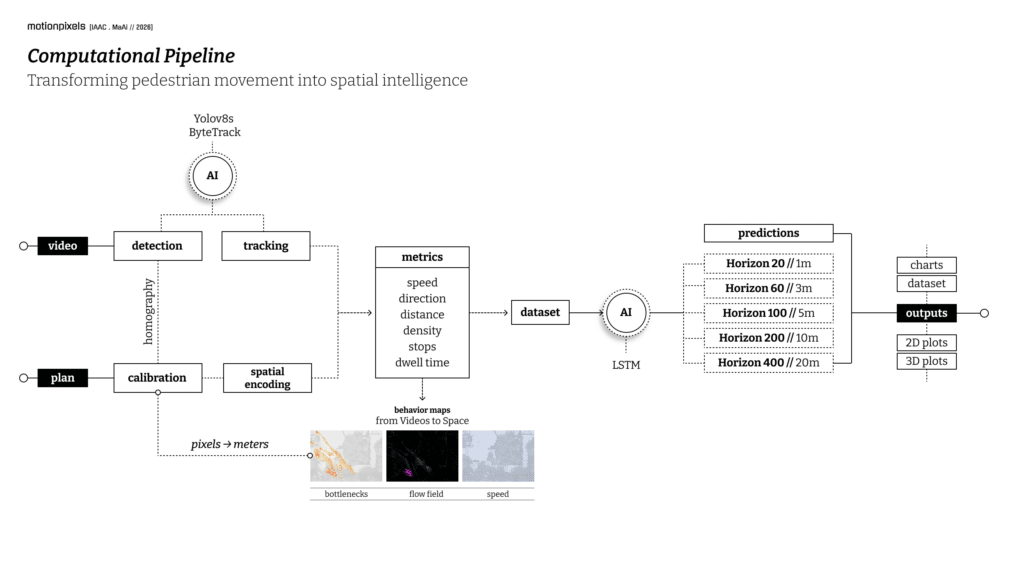
The project develops a complete computational pipeline that transforms pedestrian video footage into spatial intelligence.
The workflow begins with video capture and pedestrian detection using computer vision techniques. Individual trajectories are then extracted and calibrated into real-world coordinates through spatial mapping methods.
From these trajectories, a series of behavioral indicators are computed, including:
- Flow fields
- Speed distributions
- Density accumulation
- Bottlenecks
- Dwell zones
These datasets are subsequently used to train predictive models capable of forecasting future pedestrian movement.
The result is a system that connects spatial conditions to behavioral outcomes through measurable data.
The prototype integrates trajectory extraction, behavioral analysis, and prediction into a unified interface designed for architectural workflows.
Rather than requiring expertise in machine learning or data science, the platform aims to provide designers with direct access to behavioral insights derived from real-world observation.
Building the Dataset
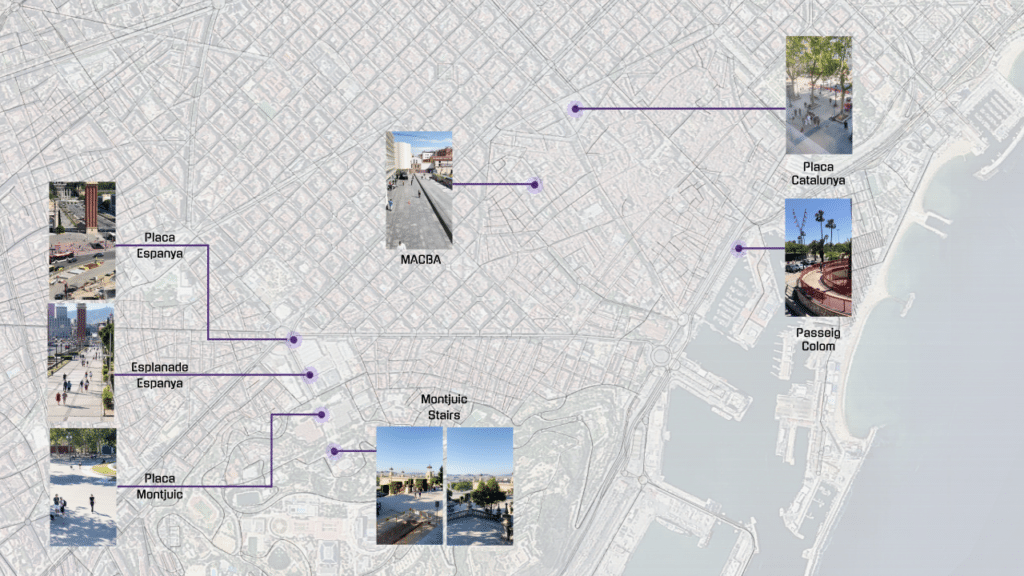
To construct the dataset, pedestrian activity was recorded across several public spaces in Barcelona. Video footage was collected and processed through a computer vision pipeline capable of detecting, tracking, and extracting pedestrian trajectories over time.
Each trajectory was transformed from image coordinates into real-world spatial coordinates through homography-based calibration. This step allowed movement to be analyzed not as pixels on a screen but as measurable behavior within architectural space.
The resulting dataset became a spatial archive of movement, capturing thousands of pedestrian observations across different urban conditions and scales.
MACBA: The Sandbox Experiment
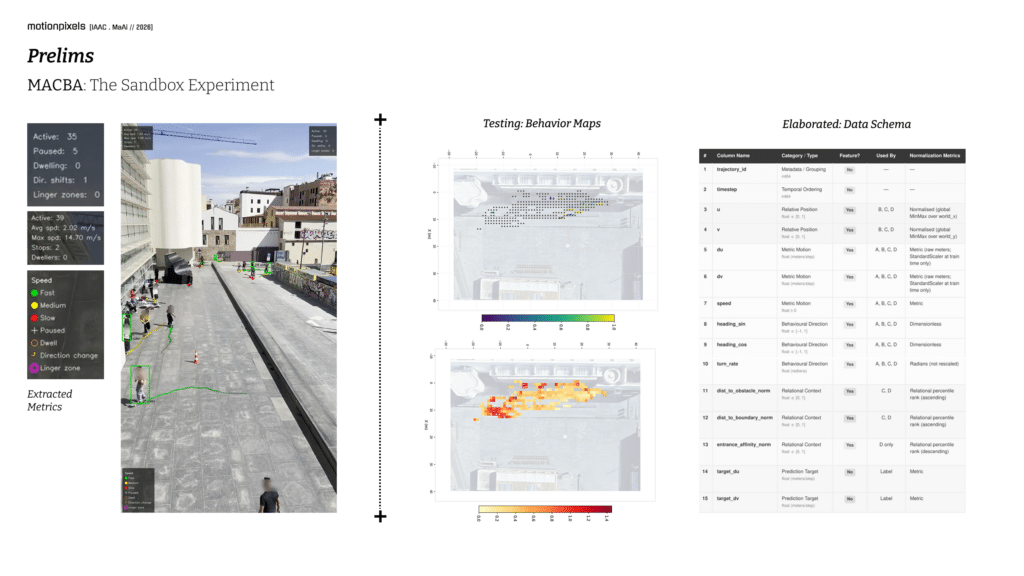
The first major testing ground for Motion Pixels was the MACBA plaza in Barcelona.
Selected for its open spatial configuration and continuous pedestrian activity namely skateboarding which offered variety in turning, flow and velocity. MACBA became the project’s sandbox environment. Here, the complete workflow was developed and validated: detection, tracking, calibration, trajectory extraction, behavioral analysis, and prediction. More than a site, MACBA became a controlled research environment through which the system’s assumptions could be tested and refined.
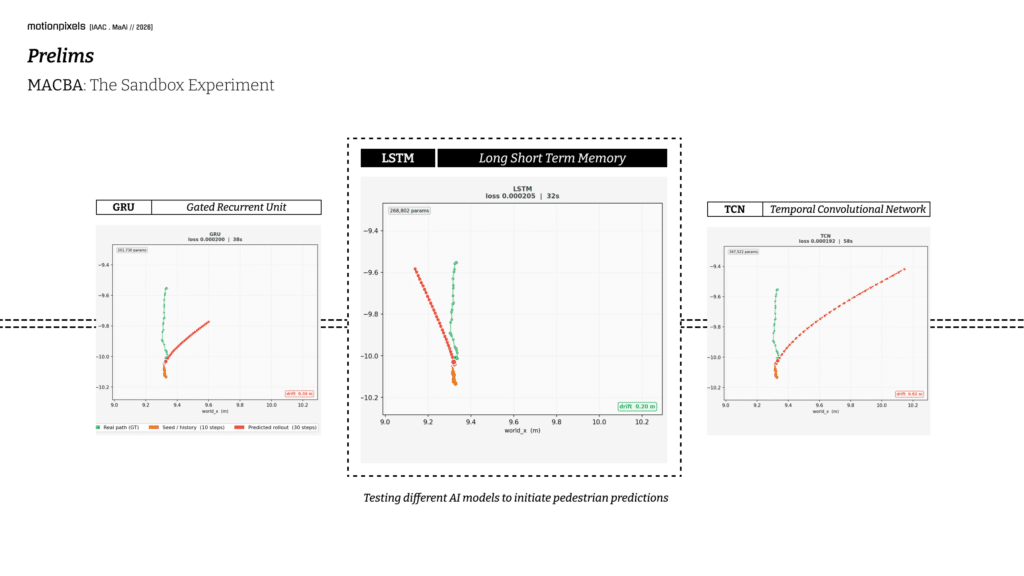
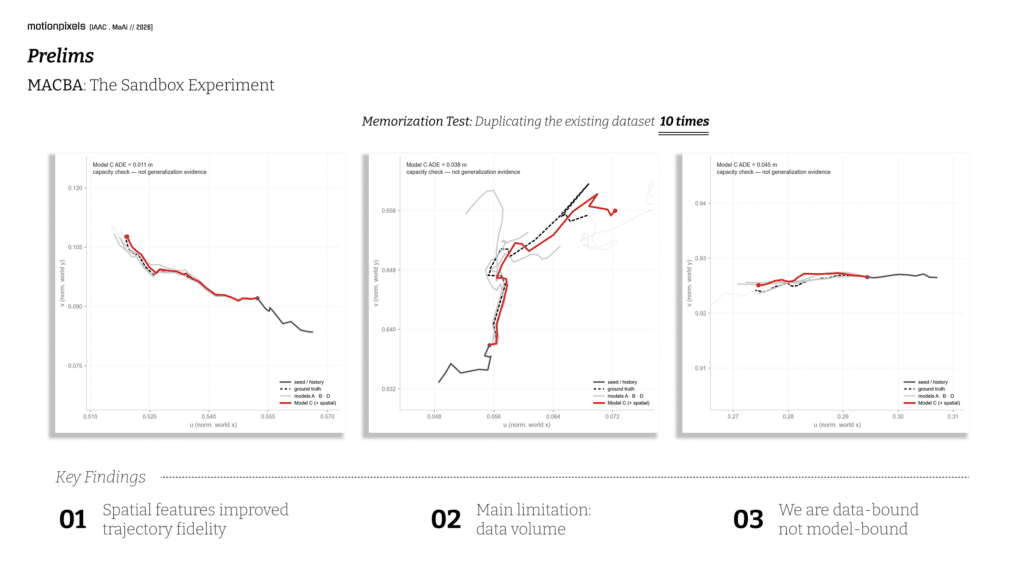
The experiments revealed an important insight. Prediction performance was not primarily constrained by model architecture, but by data availability. This finding redirected the research away from increasingly complex neural networks and toward richer spatial datasets and behavioral encoding strategies.
The sandbox phase ultimately established the foundation upon which the remainder of Motion Pixels was built.
Motion Pixels: Learning Movement from Barcelona
Collection of Dataset from Barcelona
Motion Pixels was developed through the construction of a growing behavioral dataset collected across Barcelona. Rather than relying on standardized benchmark datasets, the research focused on capturing movement within real urban environments characterized by different spatial configurations, scales, and circulation patterns.
Recordings were collected from a variety of public spaces, including plazas, open pedestrian corridors, and transitional urban environments. Each location presented distinct spatial conditions and behavioral dynamics, allowing the dataset to capture a broader spectrum of pedestrian movement than would be possible from a single site alone
Behavior Maps: Flow, Bottlenecks and Speed
Before prediction can occur, movement must first be understood. Motion Pixels generates a series of behavioral maps that translate raw trajectories into spatial patterns. These visualizations reveal how people occupy, traverse, and negotiate space.
Flow fields illustrate dominant movement directions across a site.
Speed maps identify areas of acceleration and deceleration. Bottleneck maps reveal spatial friction points where circulation becomes constrained.
Bottlenecks maps highlight locations associated with waiting, lingering, or social occupation.
Together, these layers create a behavioral reading of architecture that extends beyond geometry alone.
The maps reveal not only where people move, but how space influences movement.
Bottlenecks Mapping
The bottleneck map identifies areas where pedestrian movement experiences friction or compression. These zones emerge where circulation paths converge, spatial constraints reduce available movement space, or behavioral interactions create localized congestion. By visualizing these points of reduced mobility, the map highlights locations where the relationship between spatial configuration and movement becomes most evident, offering valuable insights into how design influences pedestrian flow.
Bottlenecks Map: Esplanade Espanya
Flow Fields Mappings
The flow field map reveals the dominant directions of pedestrian movement across the site. By aggregating thousands of trajectory vectors, the visualization exposes the underlying circulation structure of the space, highlighting preferred routes, directional convergence, and movement corridors. Rather than representing individual trajectories, the map captures collective behavioral tendencies, providing a spatial reading of how pedestrians navigate the urban environment.
Flow Fields Map: Placa Catalunya

Speed Population Mappings
The speed map illustrates variations in pedestrian velocity throughout the site. Areas of higher speed often correspond to direct circulation routes where movement is efficient and uninterrupted, while slower zones indicate locations where pedestrians pause, interact, observe their surroundings, or negotiate spatial complexity. The map transforms movement velocity into a spatial layer, revealing how different parts of the environment encourage different modes of occupation
Speed Population Map: Placa Espanya
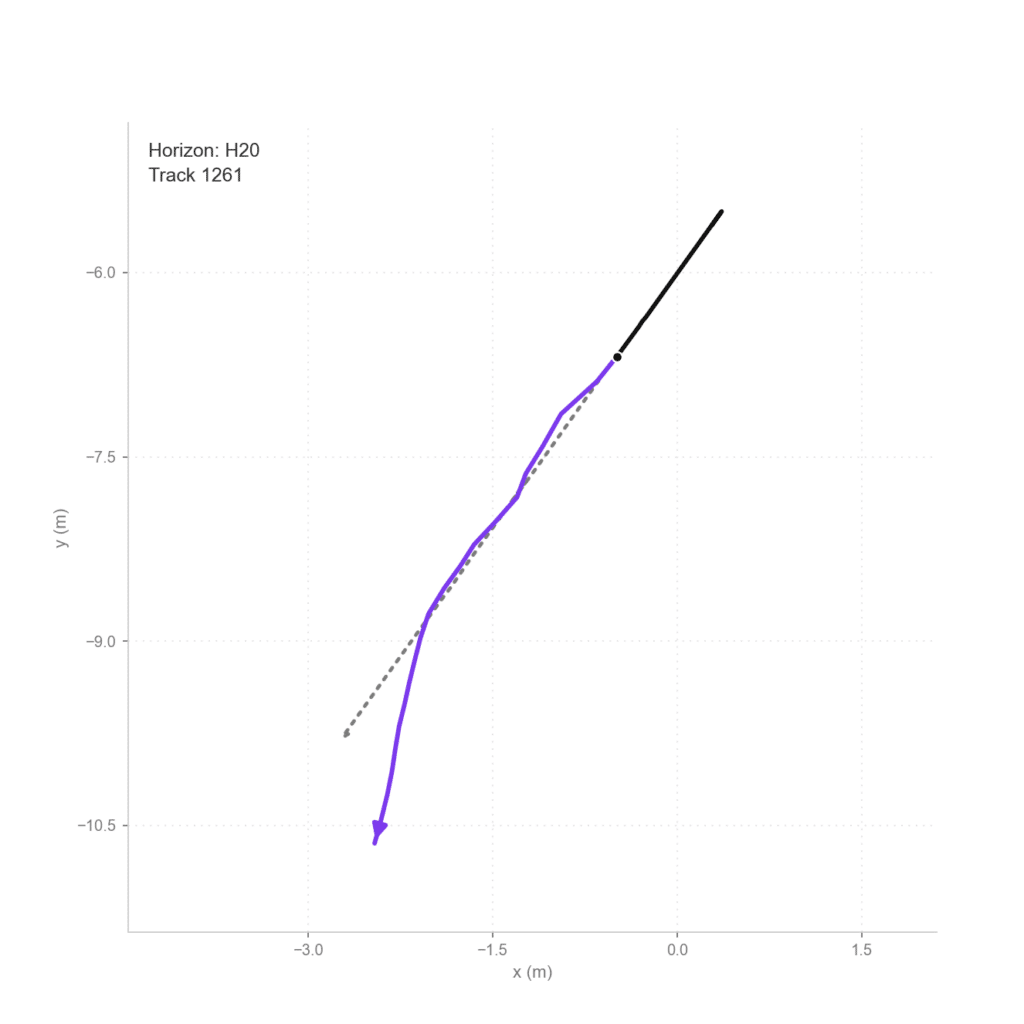
Prediction Rollout: Horizon Studies & Mapping

Horizon 20 : 1m
At Horizon 20, predictions remain closely aligned with the observed pedestrian trajectory. In both the strongest and weakest examples, the model successfully captures immediate movement direction and local path geometry, with only minor deviations emerging over the short forecasting window. At this scale, movement remains highly deterministic, allowing the model to extend observed behavior with a high degree of confidence.
Horizon 60 : 3m
At Horizon 60, the model begins projecting beyond immediate motion while still preserving overall directional intent. The strongest examples show predictions that remain nearly indistinguishable from the ground truth, following both trajectory direction and subtle curvature. Even in weaker cases, the model generally maintains the correct heading, suggesting that short-term movement patterns remain strongly predictable from recent observations.
Horizon 200 : 10m
At Horizon 200, a clear transition emerges between positional prediction and behavioral forecasting. While exact spatial alignment begins to drift, the model often continues following the dominant trajectory structure and directional tendency. The selected examples reveal that the model can maintain coherent movement patterns over extended distances, although accumulated errors gradually separate the prediction from the observed path.
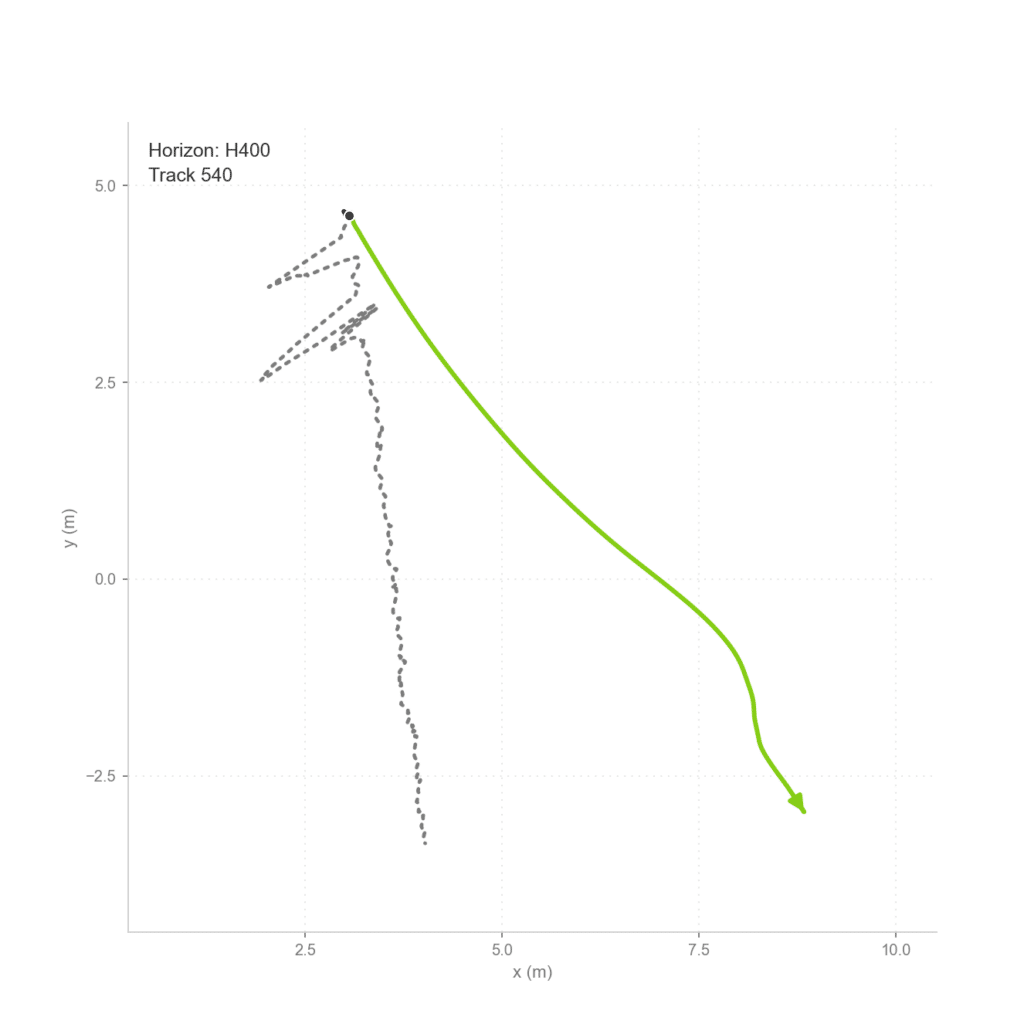
Horizon 400 : 20m
At Horizon 200, a clear transition emerges between positional prediction and behavioral forecasting. While exact spatial alignment begins to drift, the model often continues following the dominant trajectory structure and directional tendency. The selected examples reveal that the model can maintain coherent movement patterns over extended distances, although accumulated errors gradually separate the prediction from the observed path.
At Horizon 400, the model enters a regime where multiple future outcomes become plausible. The strongest examples still preserve the overall intent of movement, successfully anticipating long-range directional behavior despite increasing positional divergence. Rather than predicting exact future coordinates, the model demonstrates an ability to extrapolate probable movement tendencies across a significantly larger spatial and temporal horizon.
Prediction Rollout: Behavior Maps
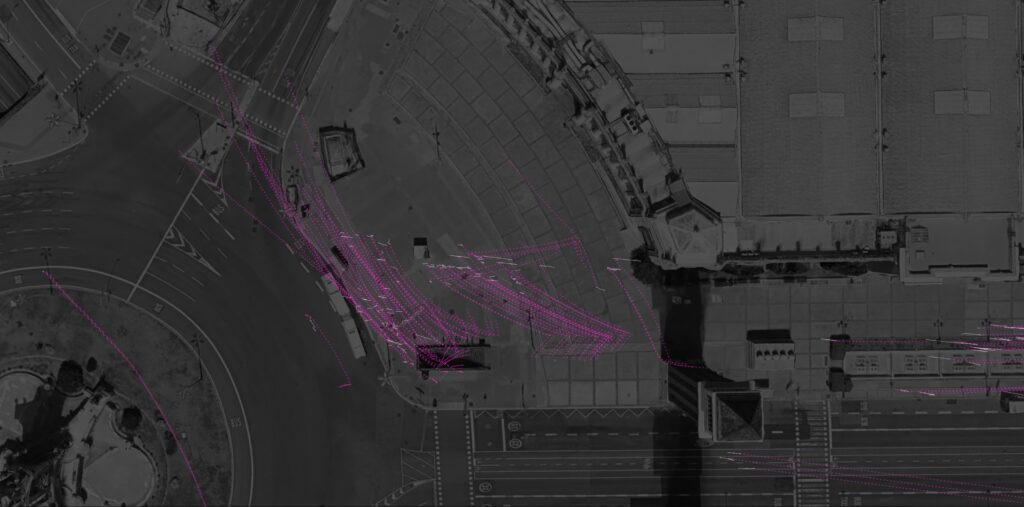
Prediction Rollout Mapping
To understand prediction not only as a numerical output but as a spatial phenomenon, the rollout trajectories were projected back onto the urban fabric of Plaça Espanya. Positioned within the architectural context that generated the data, each prediction becomes a dialogue between learned behavior and physical space. The grayscale aerial image provides a neutral reading of the site while highlighting the geometry, circulation routes, and spatial conditions that influence pedestrian movement. By overlaying predictions directly onto the city, Motion Pixels transforms abstract trajectory forecasting into a visual exploration of how people navigate, occupy, and respond to urban environments.
Research Limitations
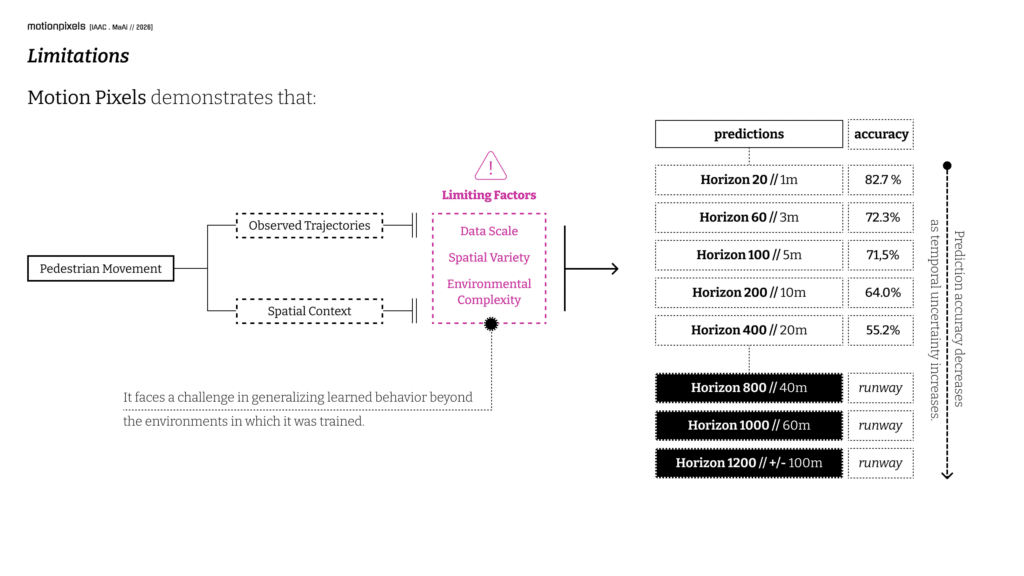
Motion Pixels remains an experimental research prototype, developed to explore whether pedestrian behavior can be learned directly from urban movement data. While the results demonstrate promising predictive capabilities, several limitations shaped the scope of the project. The dataset, although diverse and collected across multiple locations in Barcelona, remains relatively small compared to large-scale commercial systems.
Prediction quality is also dependent on video capture conditions and tracking accuracy, while social interactions between pedestrians are not yet explicitly modeled. As forecasting horizons increase, uncertainty compounds and prediction reliability naturally decreases. Furthermore, the current framework is calibrated to the spatial conditions represented within the dataset and would require adaptation when deployed in new environments.
These limitations do not diminish the findings; rather, they define the next stage of development and highlight opportunities for future research. Motion Pixels should therefore be understood not as a finished product, but as a proof of concept demonstrating the feasibility of learning, mapping, and forecasting urban behavior from movement data.
Outro // Beyond the Plan
Future developments could include integrating 3D environments into the workflow, projecting behavioral maps and predicted trajectories directly onto architectural models, expanding datasets, and further improving prediction accuracy.
Yet these technical advancements are secondary to the central motivation behind the research: spatial design. Throughout Motion Pixels, prediction was never the final objective. Instead, it served as a vehicle for exploring a broader question: how can the relationship between people and the spaces they inhabit be better understood? The research suggests that pedestrian movement is more than a byproduct of architecture; it is a continuous form of feedback. Every path taken, every shortcut formed, and every area avoided reveals something about how space is actually experienced. If architectural drawings represent intention, then behavior represents reality.
By transforming movement into spatial intelligence, Motion Pixels proposes a new layer of evidence for design—one derived not from assumptions of use, but from the observation of life as it unfolds in space. Ultimately, the ambition is not simply to predict movement, but to help push spatial design toward a future where it evolves into spatial intelligence.
