
Abstract
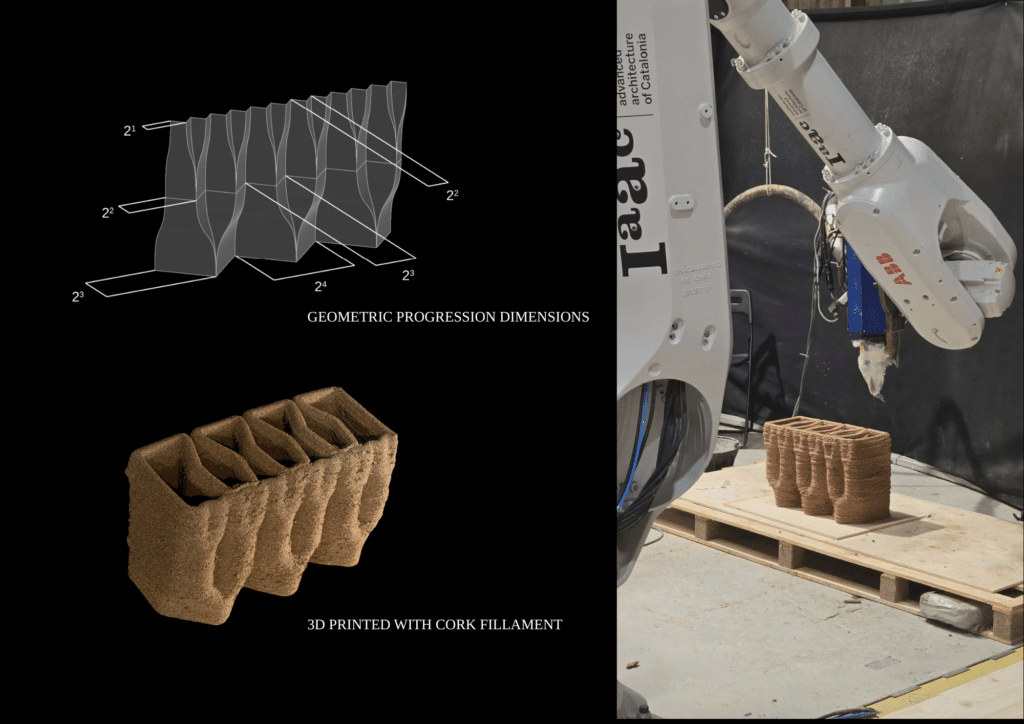
This project looks at turning waste cork materials into 3D printed acoustic panels, using design ideas taken from Gaudí’s work in the Sagrada Familia. The cork comes from reused bottle stoppers collected in Catalonia, then ground down and turned into a printable filament, so the whole process fits into a circular material workflow.
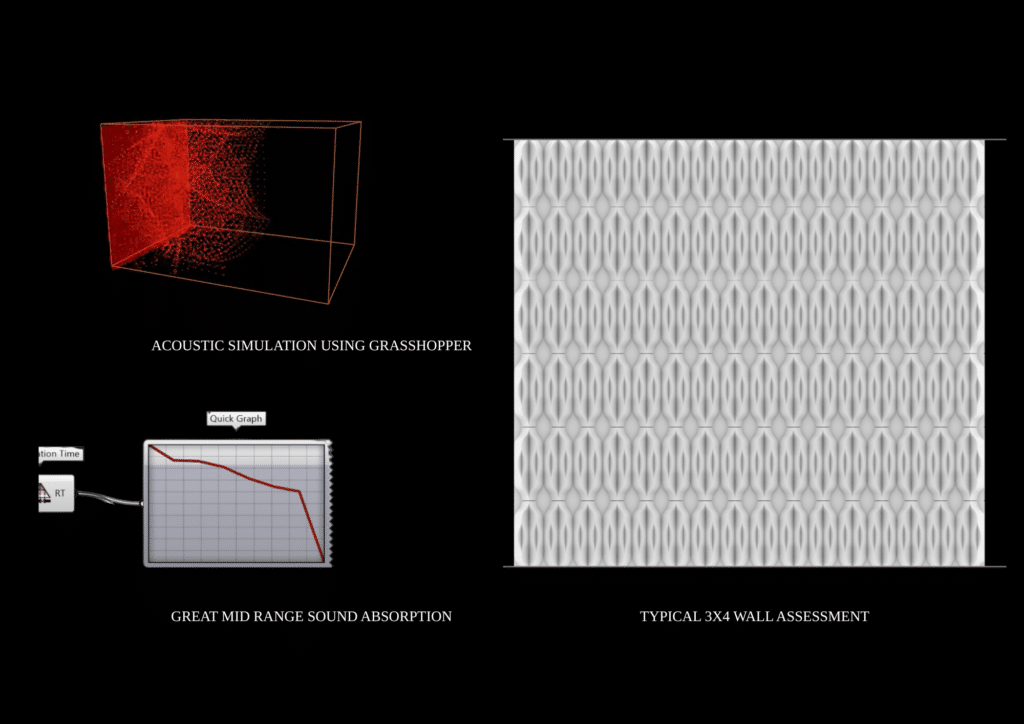
On the design side, we explored a column-based geometry inspired by Gaudí, using rotated polygon profiles to generate surface variation. This was then tested for printability and assembled into a repeating wall system. After running acoustic simulations, the final panel setup showed improved sound absorption, while also creating a textured spatial effect.
Project
This project combined materials originally harvested from the Iberian peninsula, and repurposed from bars in Catalonia into acoustic panels that are based on design motifs found in the Sagrada Familia in Barcelona and fabricated right here in IAAC’s laboratory.
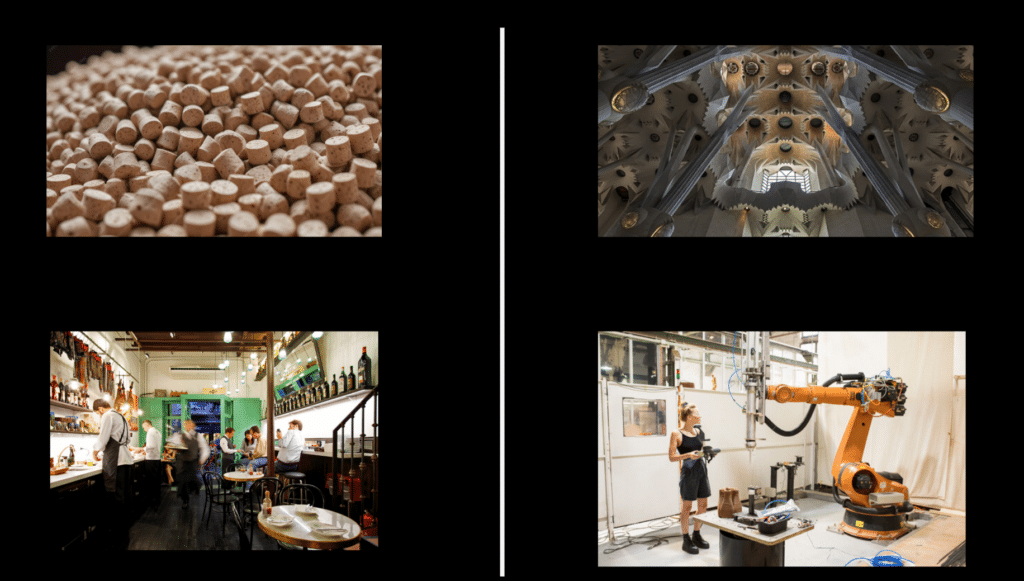
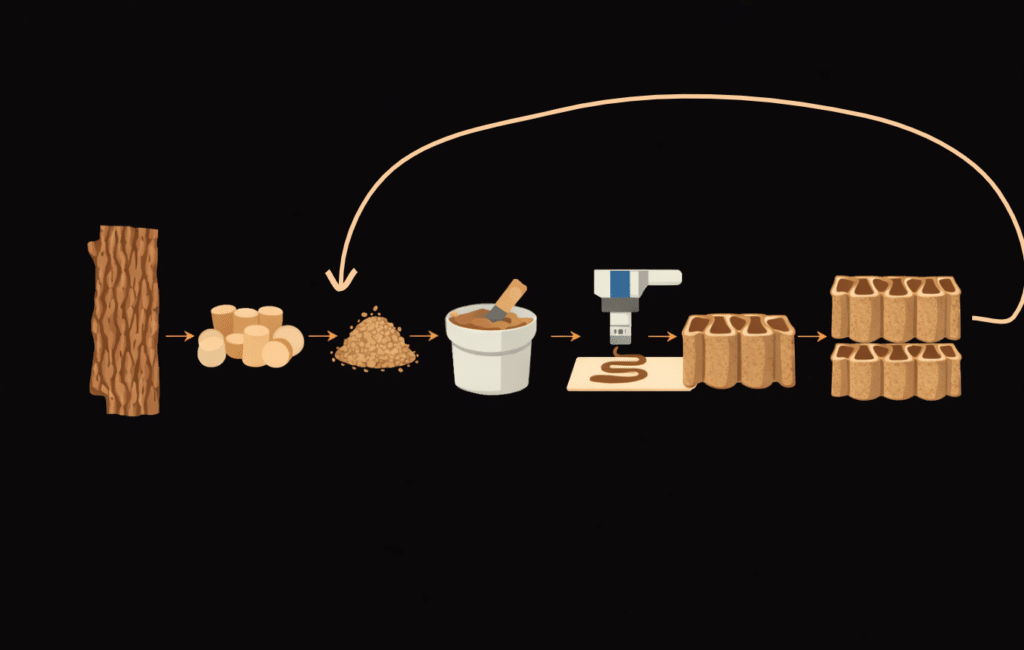
This project investigated how cork can be used within the framework of a circular economy; once the original product has reached the end of its lifecycle, the materials can be harvested and repurposed once more. In this instance, cork originally farmed from trees and used as bottle stoppers, are then ground and combined with other materials to create a filament for 3D printing additive manufacturing.
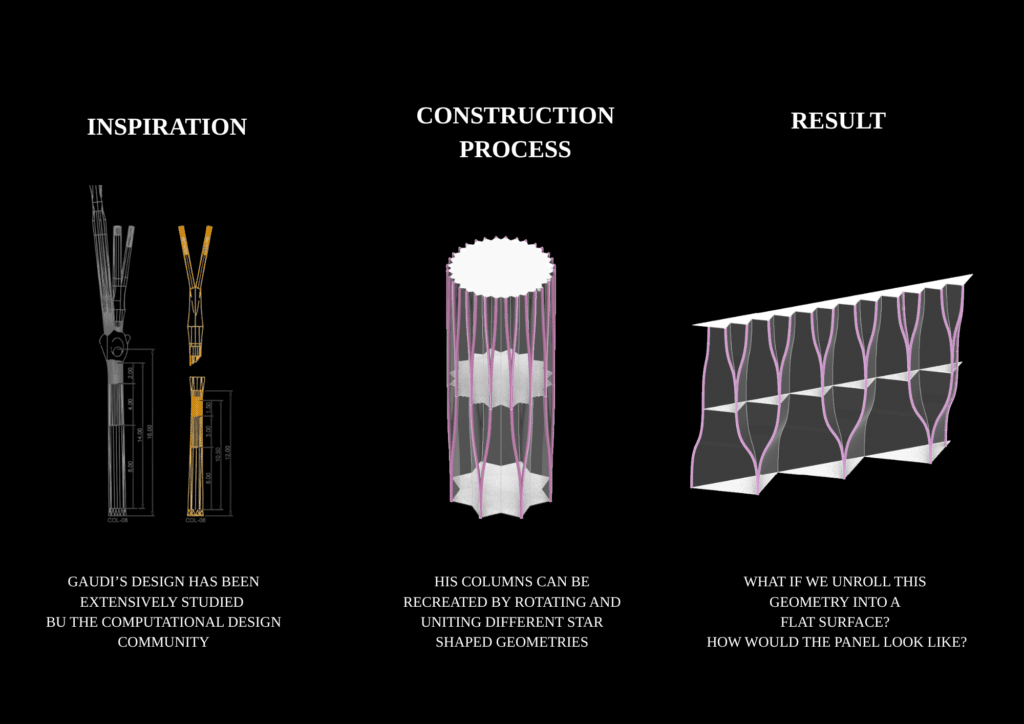
The formal exploration for the acoustic panels iterated on Gaudi’s column logic: polygonal profile geometry rotated out of phase and connected using strong vertical lines. When this logic is applied to a flat surface, it produces the geometry shown below on the right-hand side.
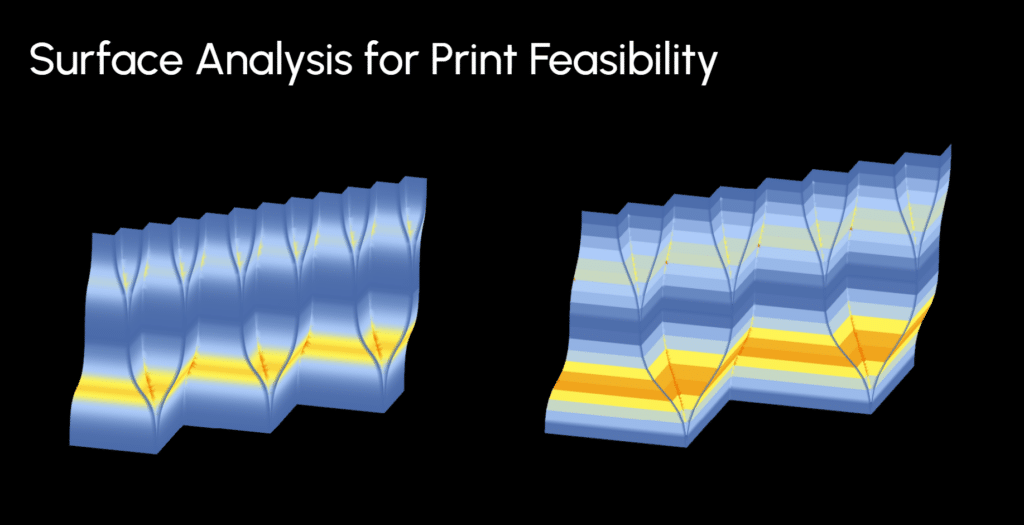
We applied a surface analysis to judge the feasibility of printing the geometry without collapse or printing errors.
We created a wall assembly by flipping, stacking, and repeating the same 30cm x 50cm wall panel. After, we applied an acoustic simulation in Pachyderm and observed a superior Sound Absorption Rate as a result of the acoustic tile assembly.
Below shows the final print, including dimensions for the design, and a view of the robot arm setup.
Final visualizations of the system applied in an interior:


