WORKSHOP 2.2 – Disassembly & Reassembly

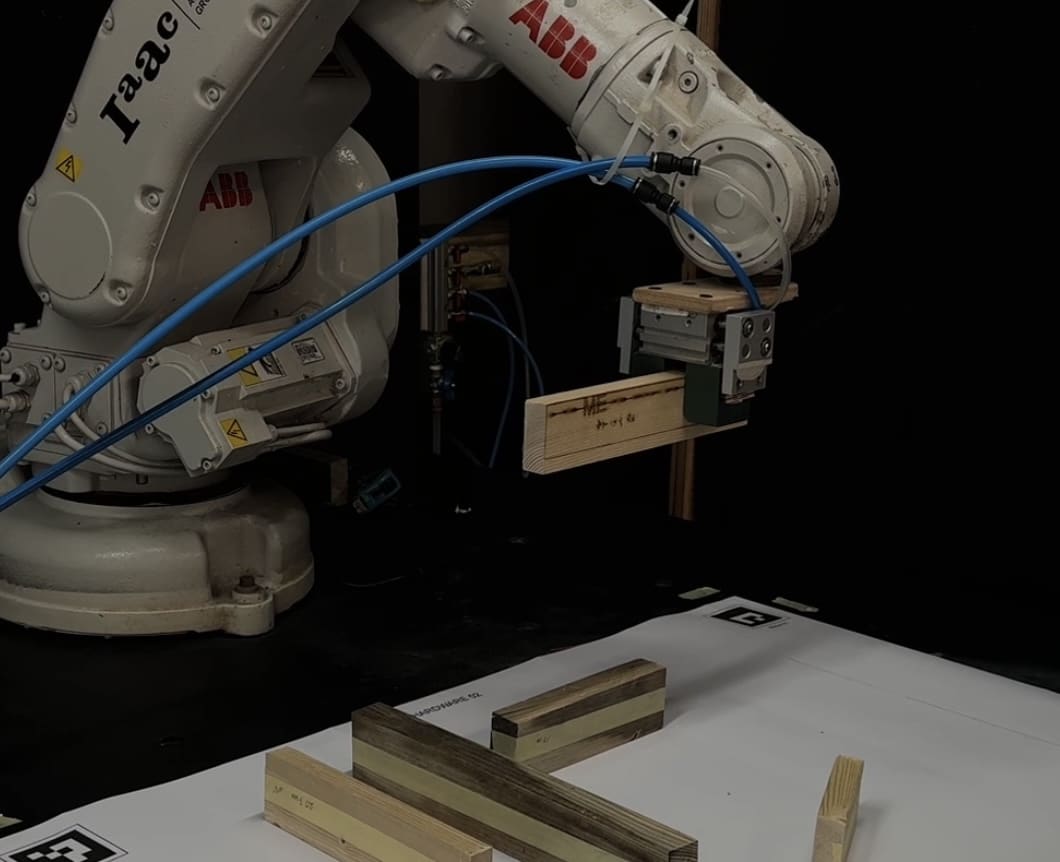
Robotic Brickwork Disassembly & Reassembly Enabled by Spatial Artificial Intelligence In this blog post, we’re sharing the project we built during the IAAC 2026 Workshop 2.2 with the Augmented Fabrication Lab. Our main goal was to move beyond just designing on a computer and actually work with robots and smart sensors in the real world. … Read more