
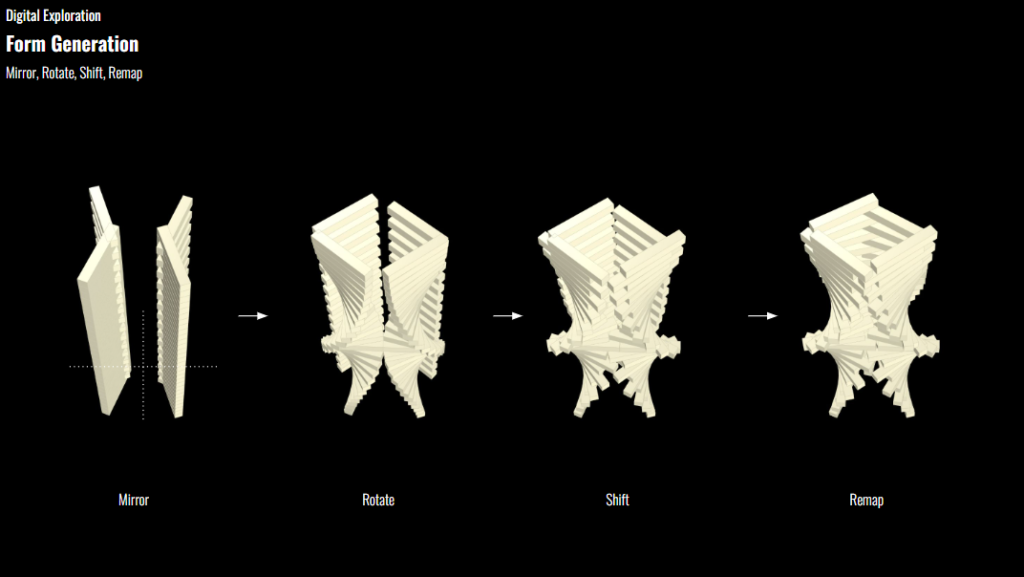
The goal of this project is to comprehend the pick-and-place robotic fabrication process using timber members and how to optimize the process using design choices. By experimenting with various twist, rotate, shift, mirror, and scale actions, column typologies that eventually took the form of a zipper-like column were created. The exercise helps us to understand the basics of robotics kinematics, simulation, and robot control integrating the limitations and opportunities of the robotic process for our design.

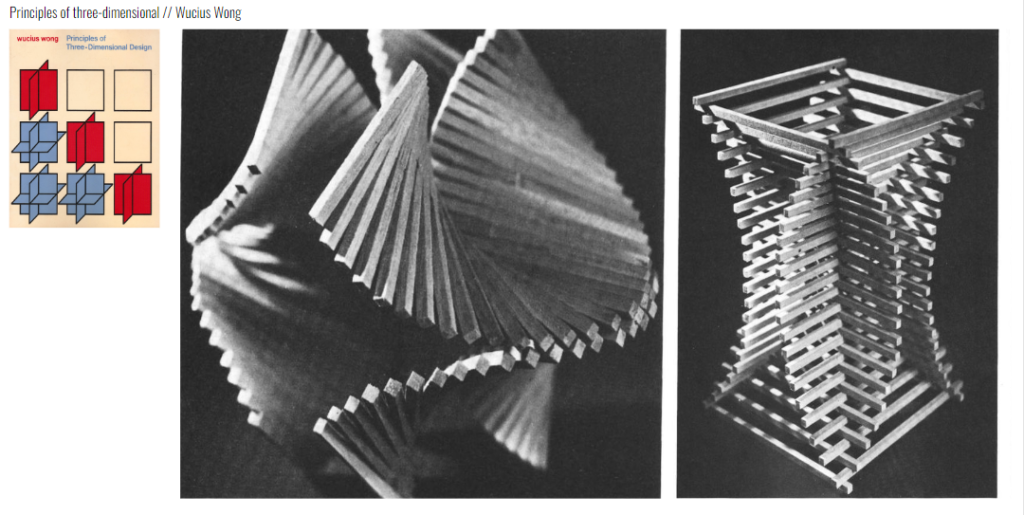
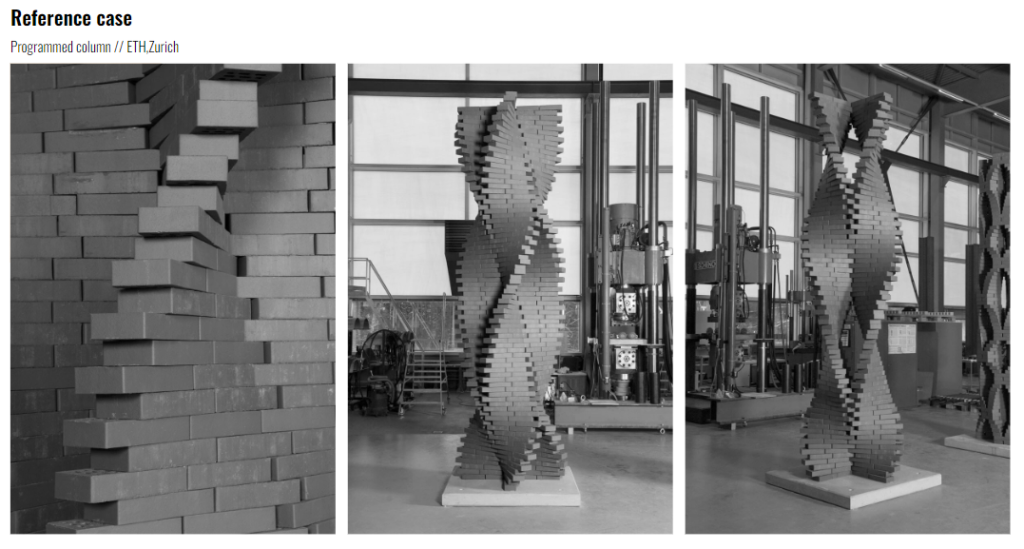
State of Art
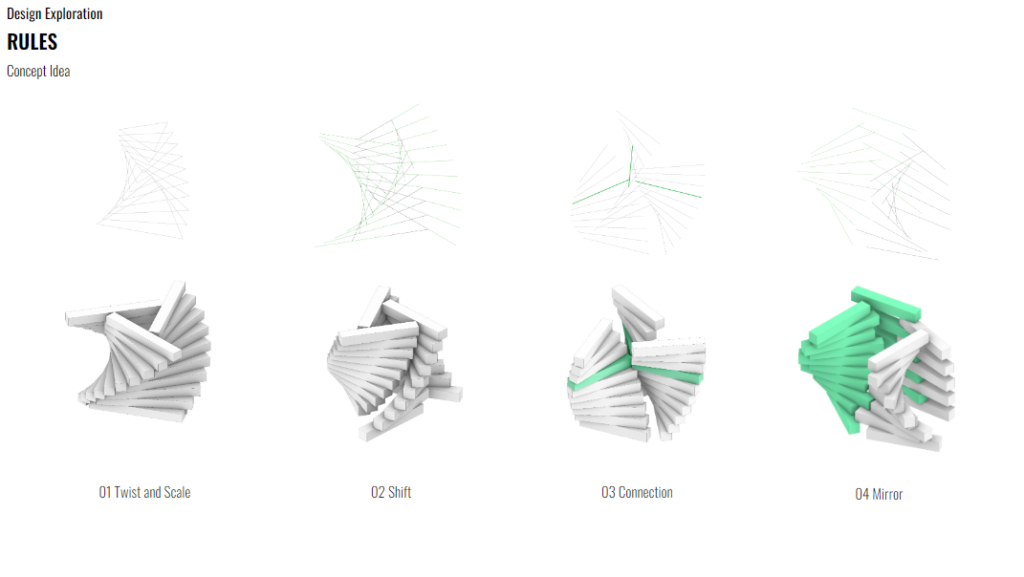
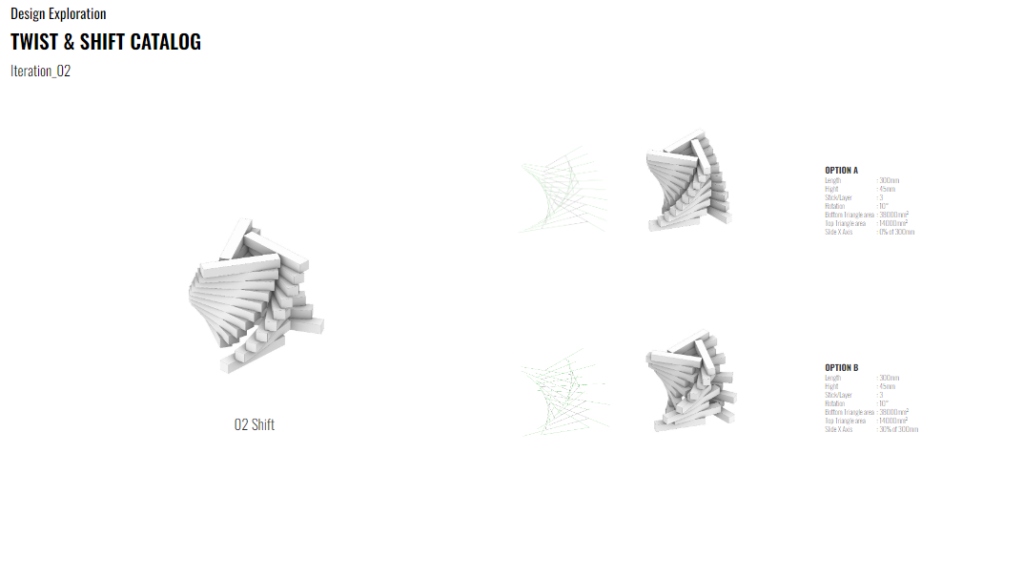
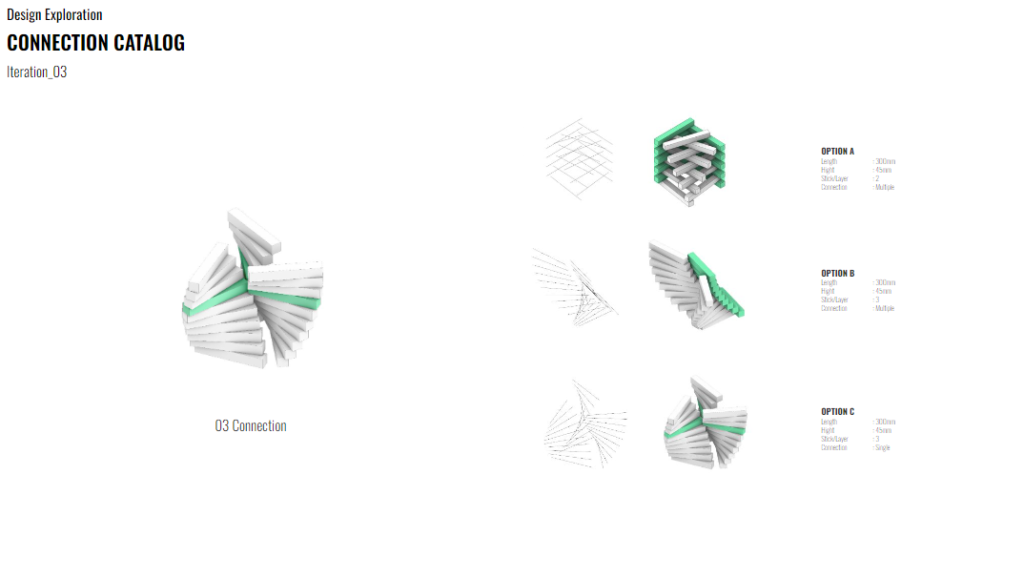
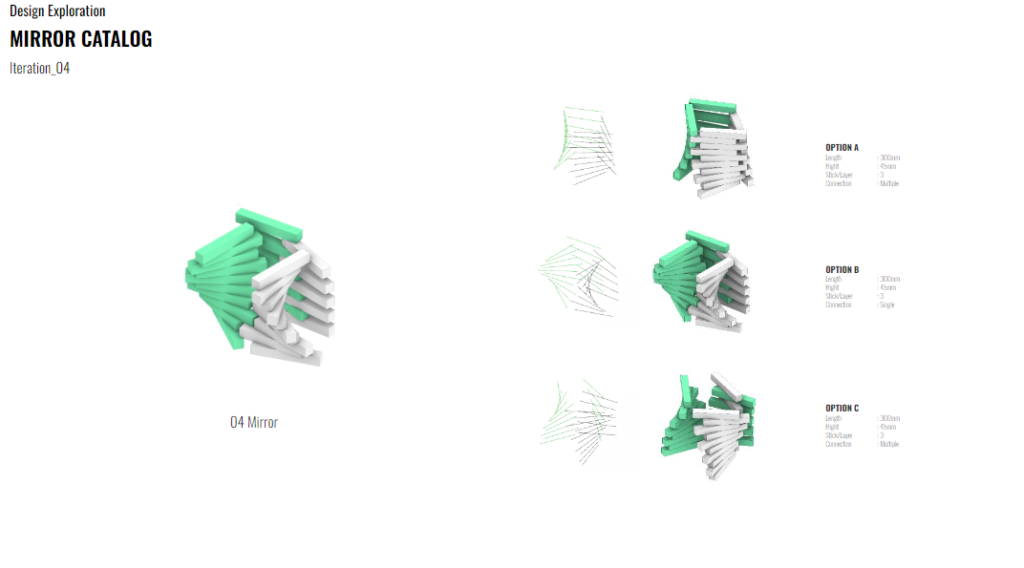
Design Exploration

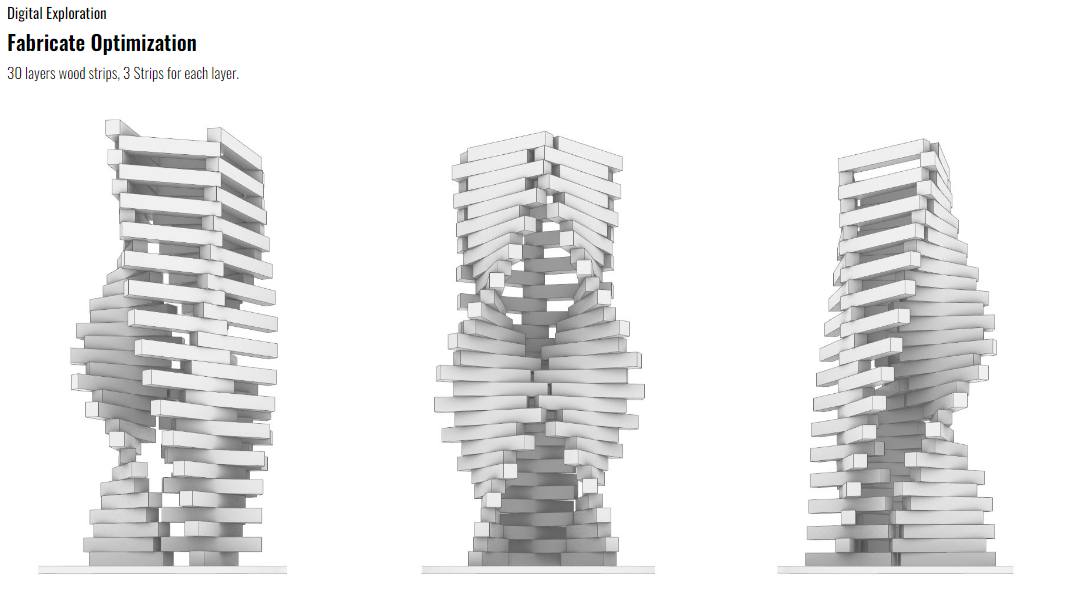
Digital Exploration
Digital Optimization
Fabricate Optimization

Robotic and Physx Simulation
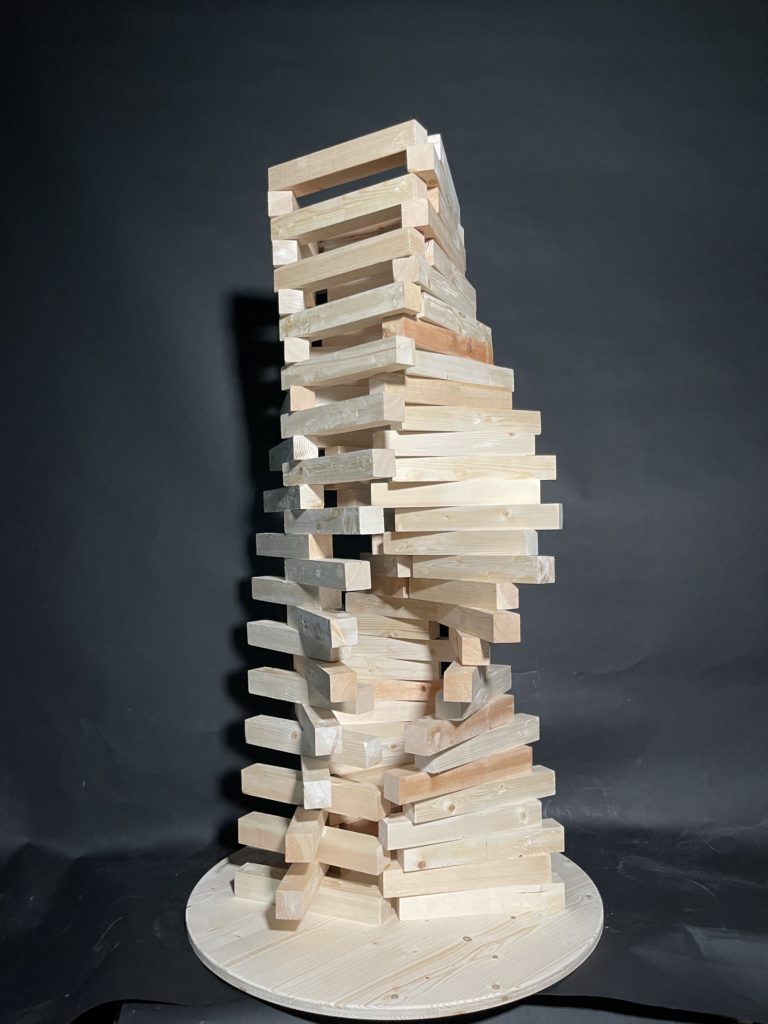
Wood Column Photos




Technical Drawings


TechnicalPossibilities Exploration Drawings


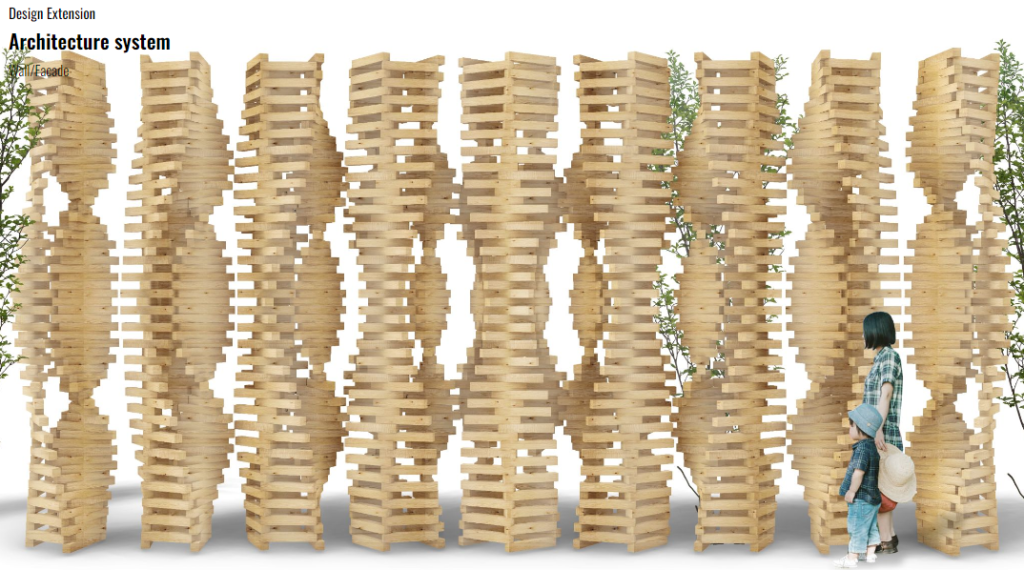
Final Renderings


