
The work presented in this blog post is an approach combining Robotics and Microcontrollers as preparation for a main Research Studio project focused on sustainable facades and environmental guidelines. This represents our first steps in exploring these fields and their connections with Artificial Intelligence in Architecture and the Built Environment.
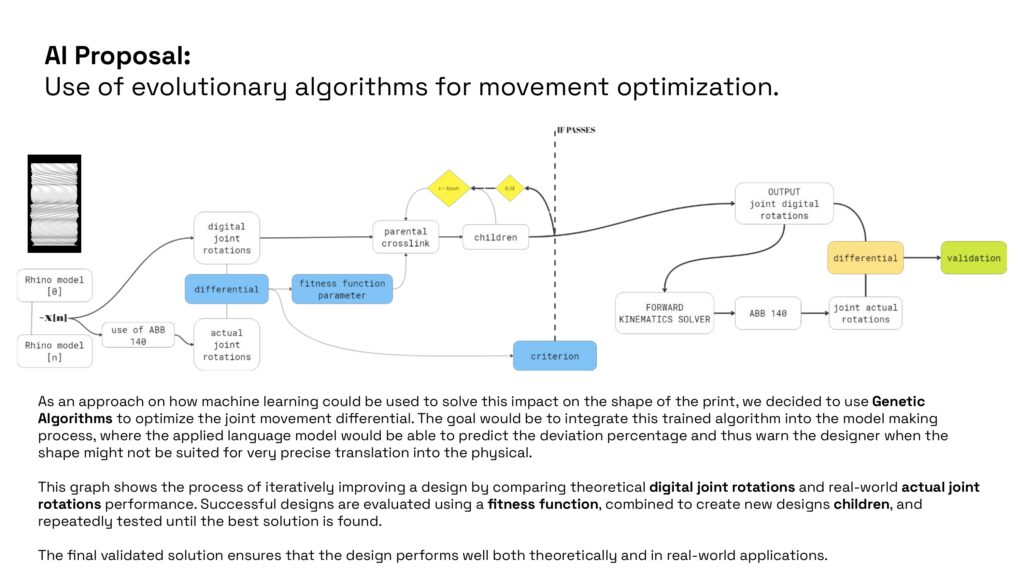
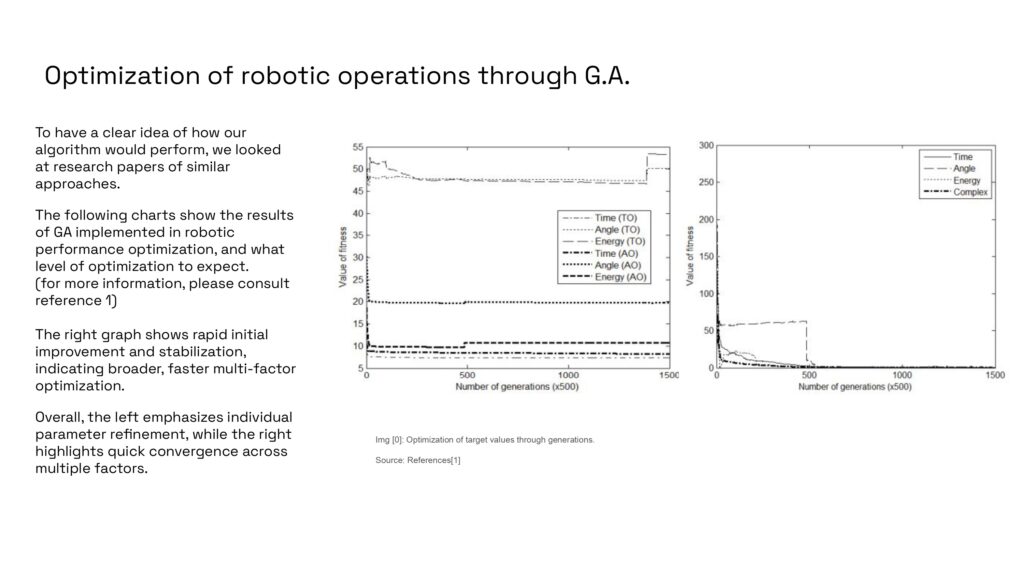
In the Robotics domain, the project explores 3D printing, movement analysis, trajectory planning, and model reconstruction using forward kinematics. It also includes an AI-based proposal: the use of evolutionary algorithms for optimizing movement.
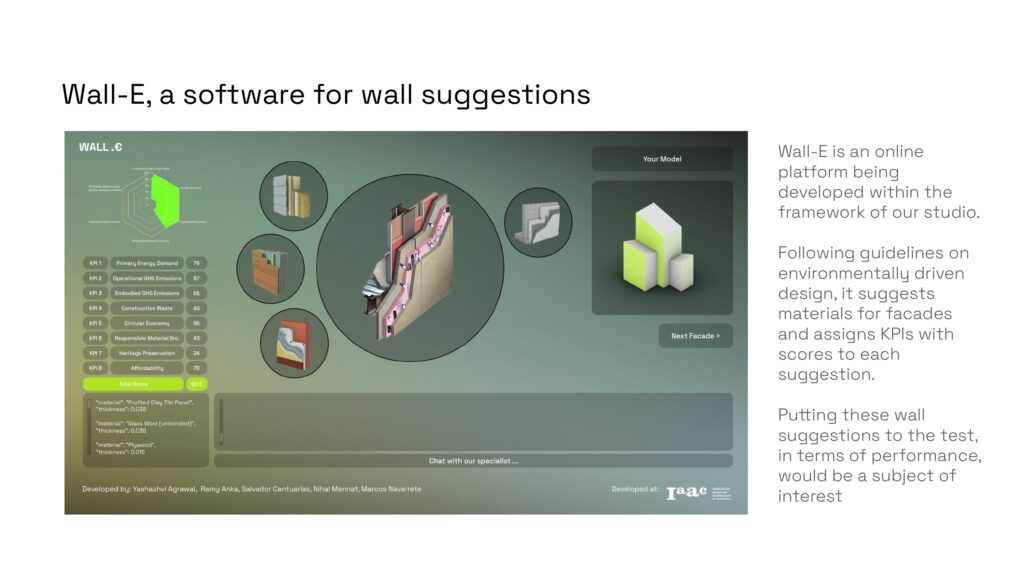
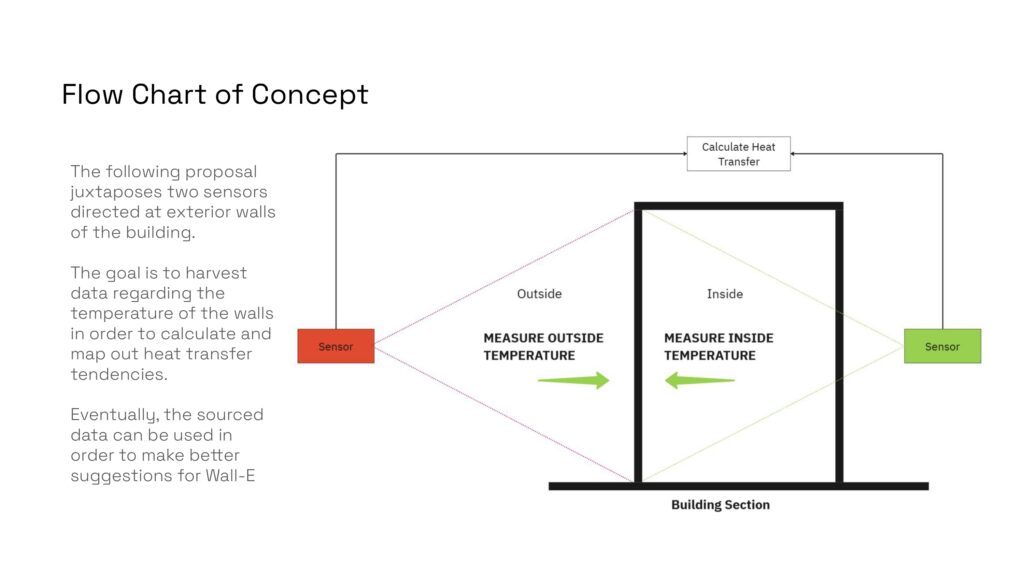
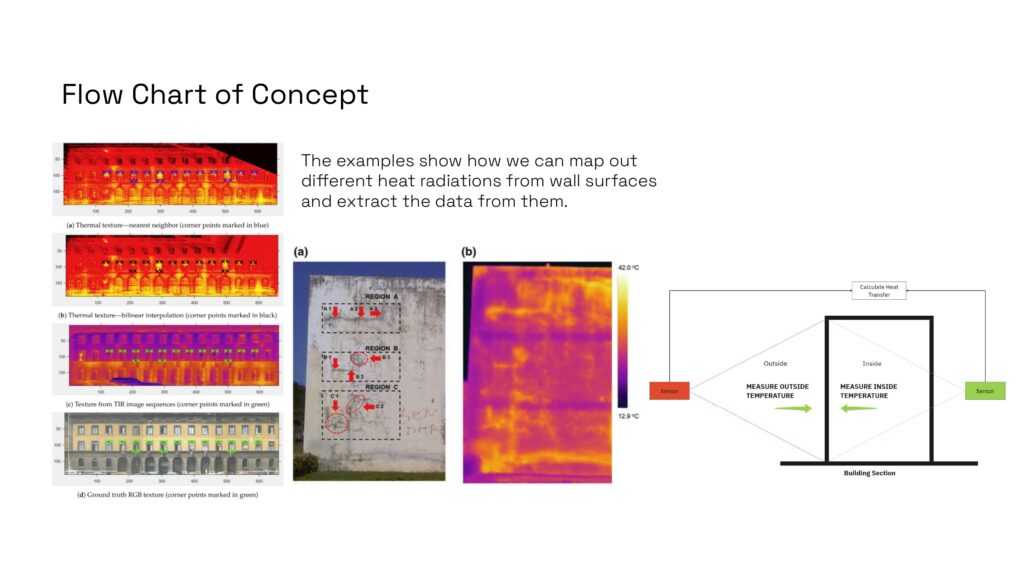
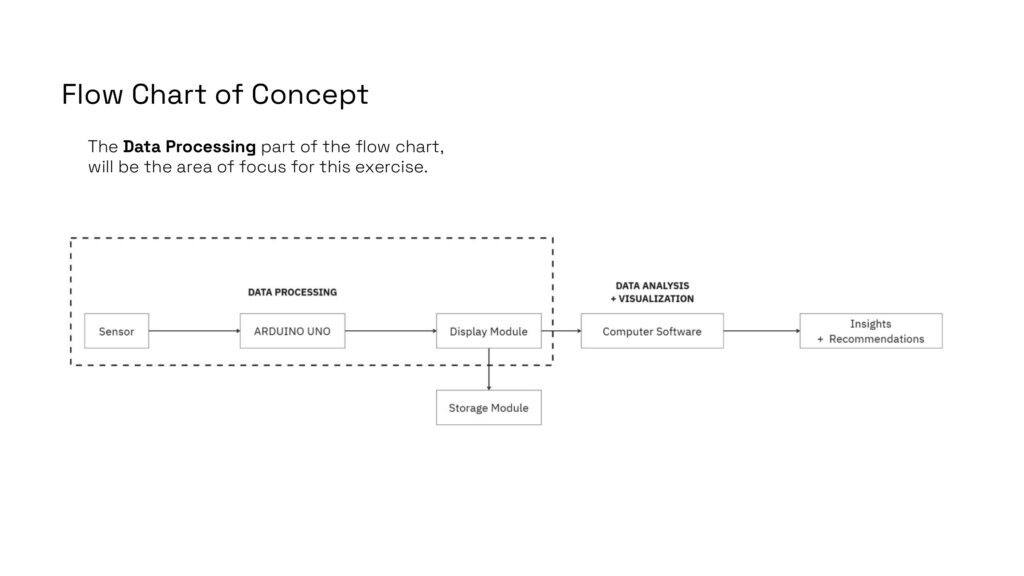
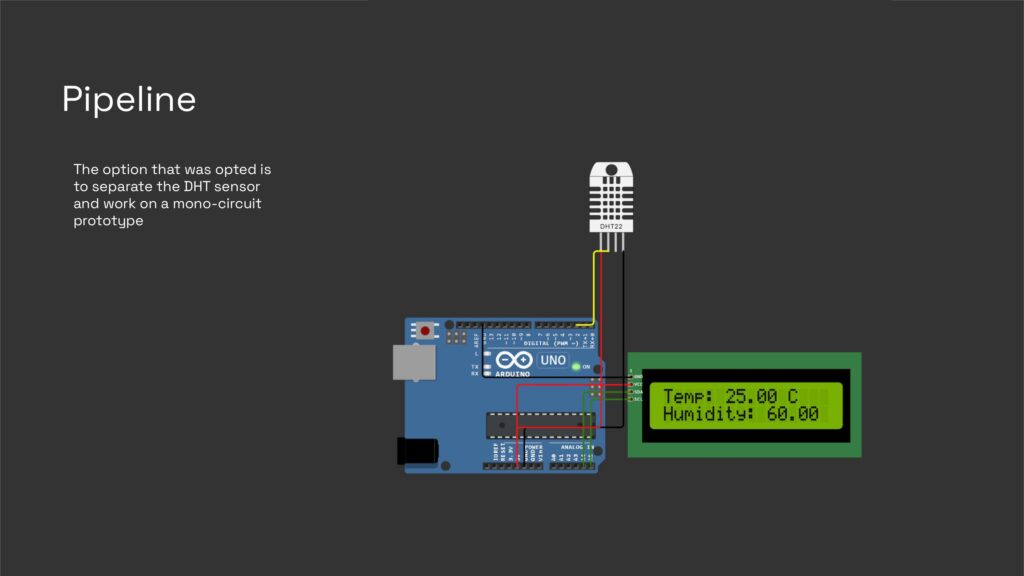
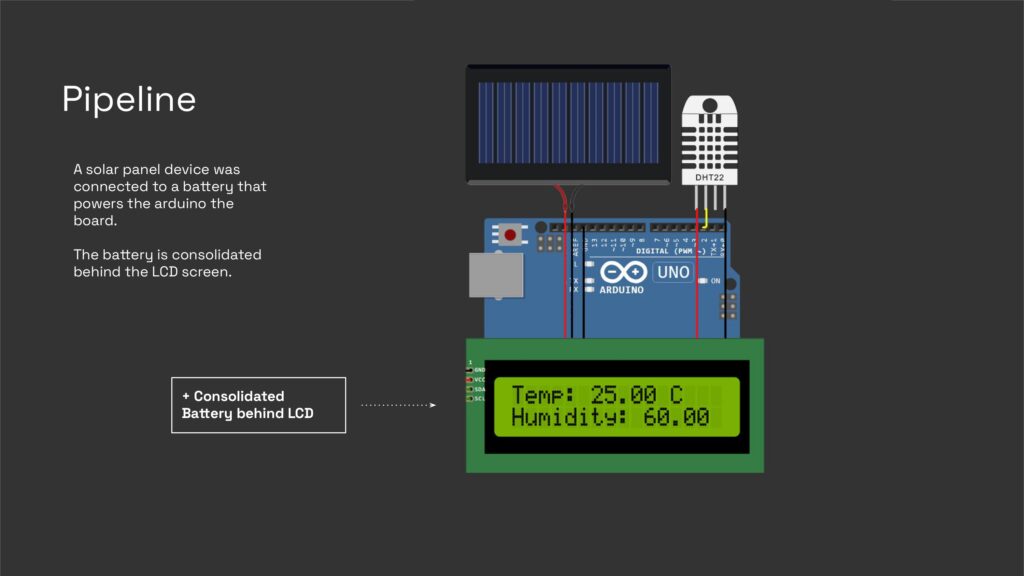
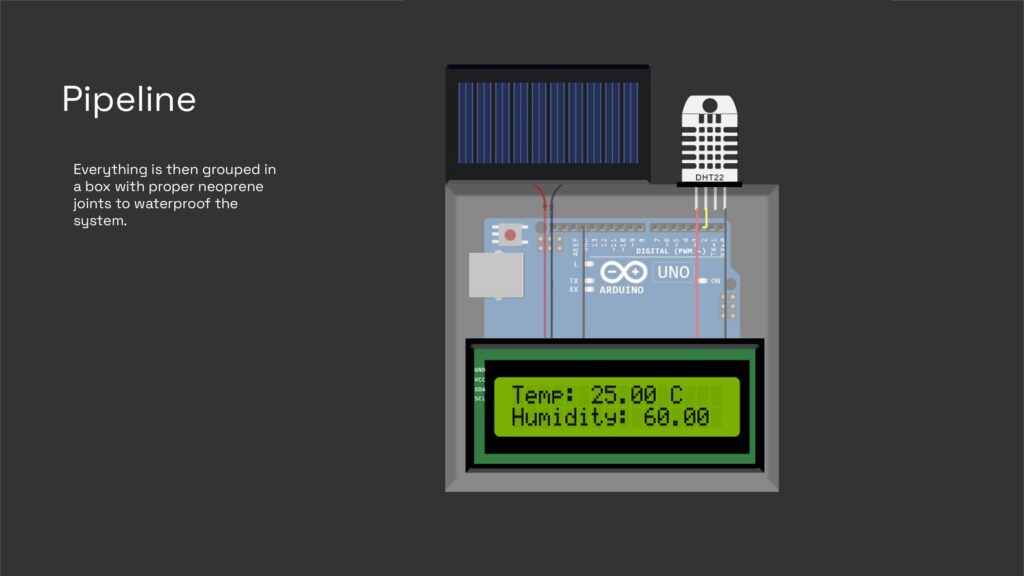
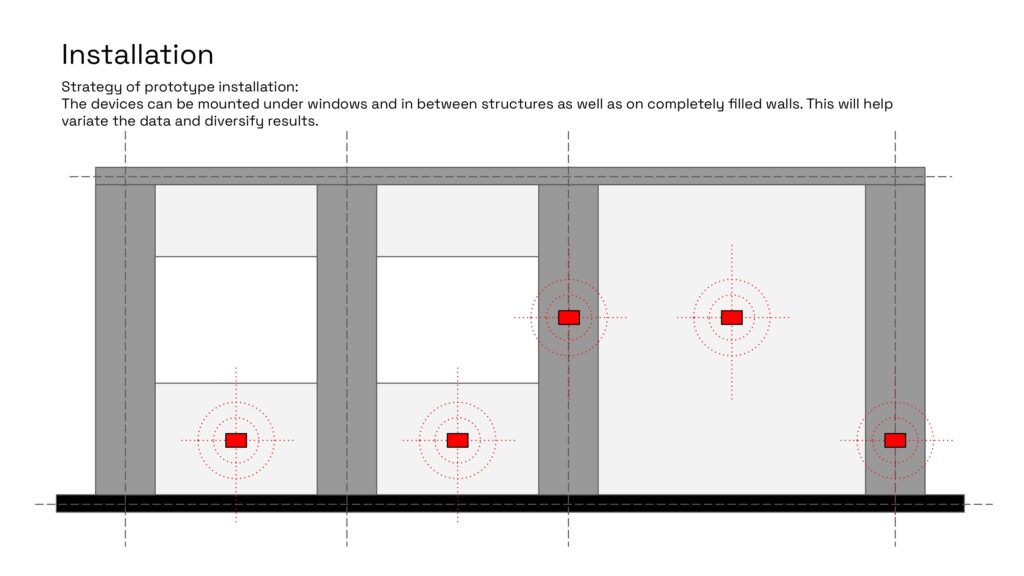
In the Micro-controllers domain, the project introduces a prototype for measuring facade temperatures. This device uses surface temperature measurements to gather information from building facades, which can inform future improvements, creating data for possible AI analysis. By measuring the temperature of a building’s walls from the interior and calculating heat transfer, the project aims to evaluate whether heat transfer is evenly distributed across the facade or if the materials used in the walls are causing thermal hotspots.
Kinematic Analysis
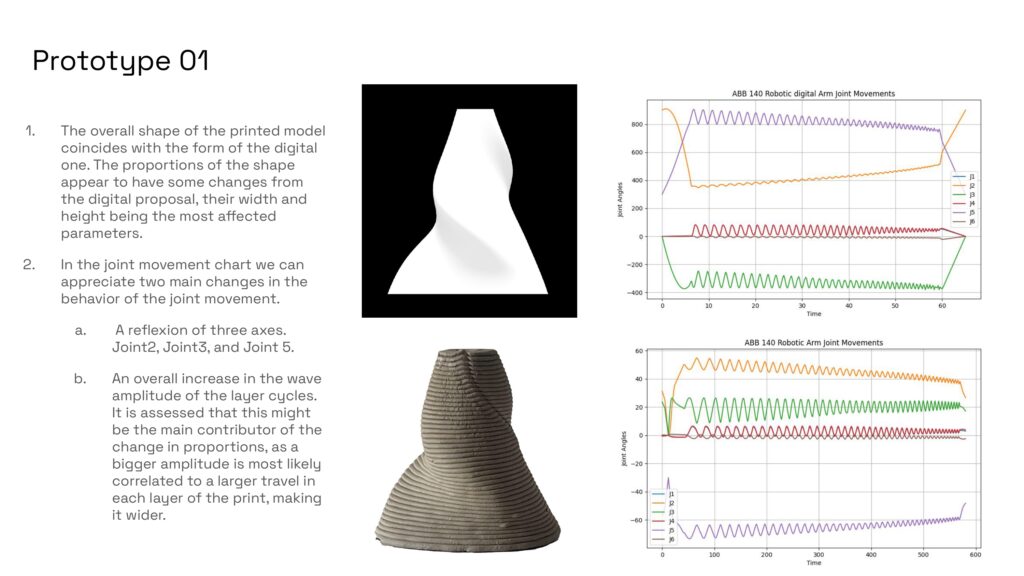
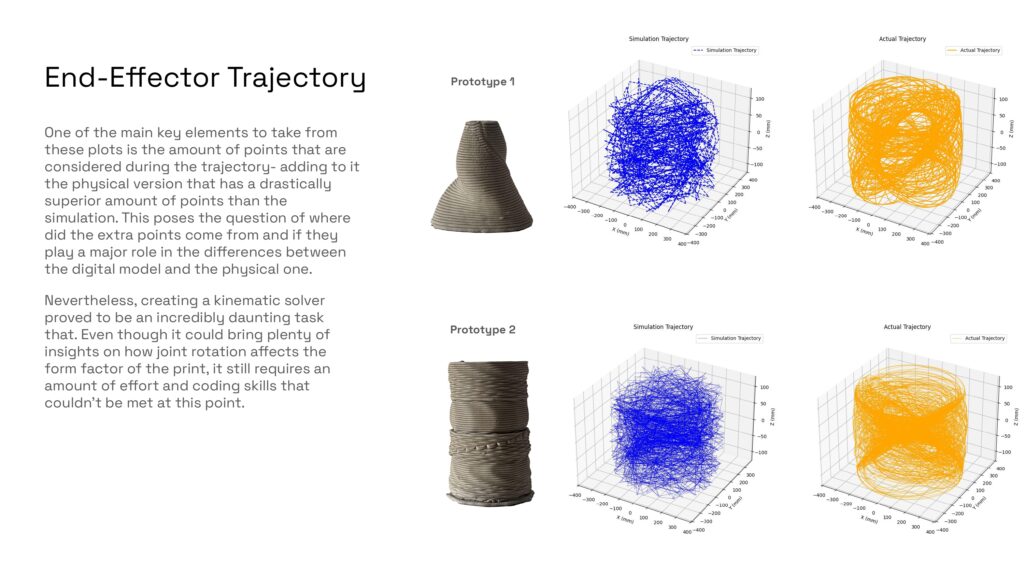
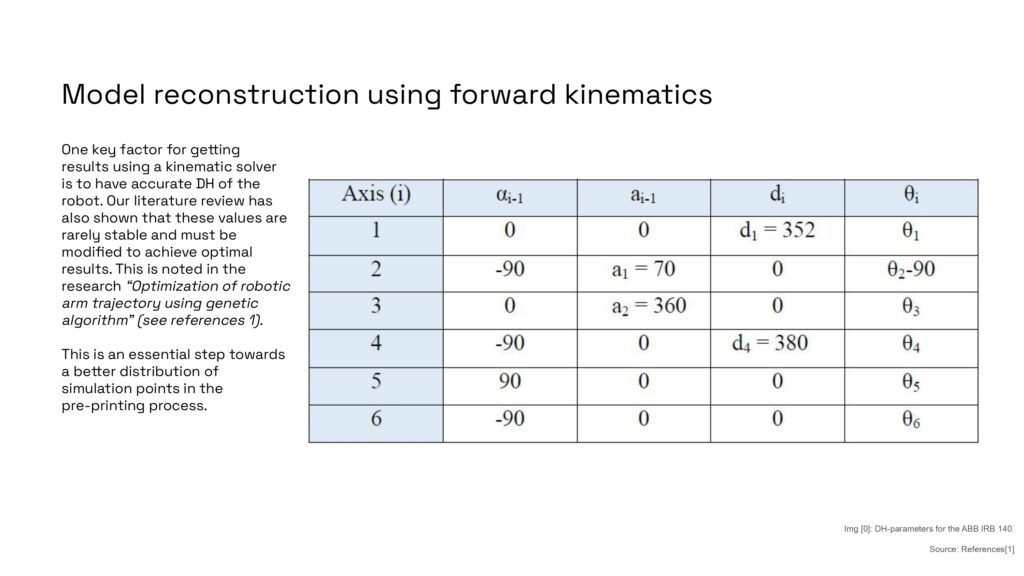
To expand on the visualization of the potential changes that joint rotation differentials had on the model, efforts were made to apply forward kinematic approaches through a solver.
The main objective was to obtain the trajectory of the end effector by only using the joint rotations as an input, getting a series of points in a cartesian space that in conjunction should resemble the shape of the model.
As a clear reference of how it should look, we had the grasshopper simulation, visualizing the points, lines and completion percentage.
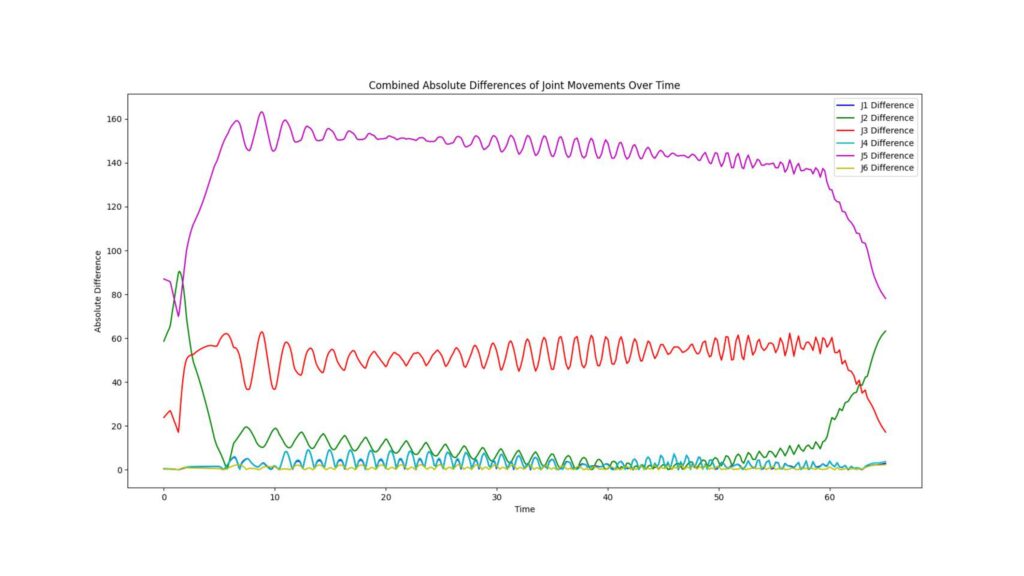
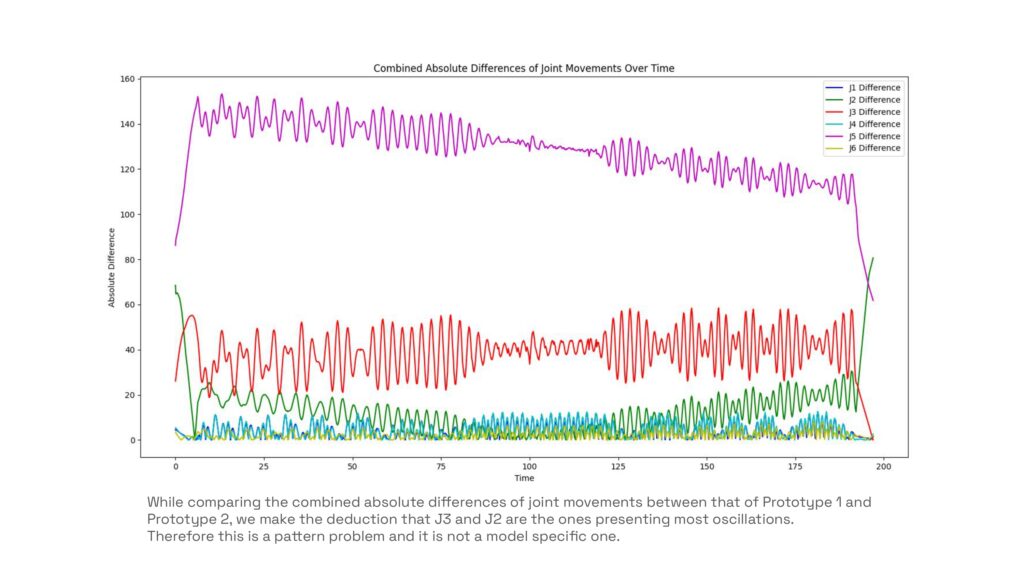
The task was first approached by trying to code a solver, from which we got the plots displayed on the following slide. These plots, even though they do not resemble the model shape, do give many insights on the differences between the parameters used to perform the print.
References:
- Števo, S., Sekaj, I., & Dekan, M. (2014). Optimization of robotic arm trajectory using genetic algorithm. IFAC Proceedings Volumes, 47(3), 1748–1753. https://doi.org/10.3182/20140824-6-za-1003.01073
- Almaged, M. (2017). Forward and inverse kinematic analysis and validation of the ABB IRB 140 Industrial Robot. International Journal of Electronics Mechanical and Mechatronics Engineering, 7(2), 1383–1401. https://doi.org/10.17932/iau.ijemme.21460604.2017.7/2.1383-1401


Product References:
- https://www.amazon.es/TECNOULAB-MLX90614-Temperatura-infrarrojo-MLX90614ESF
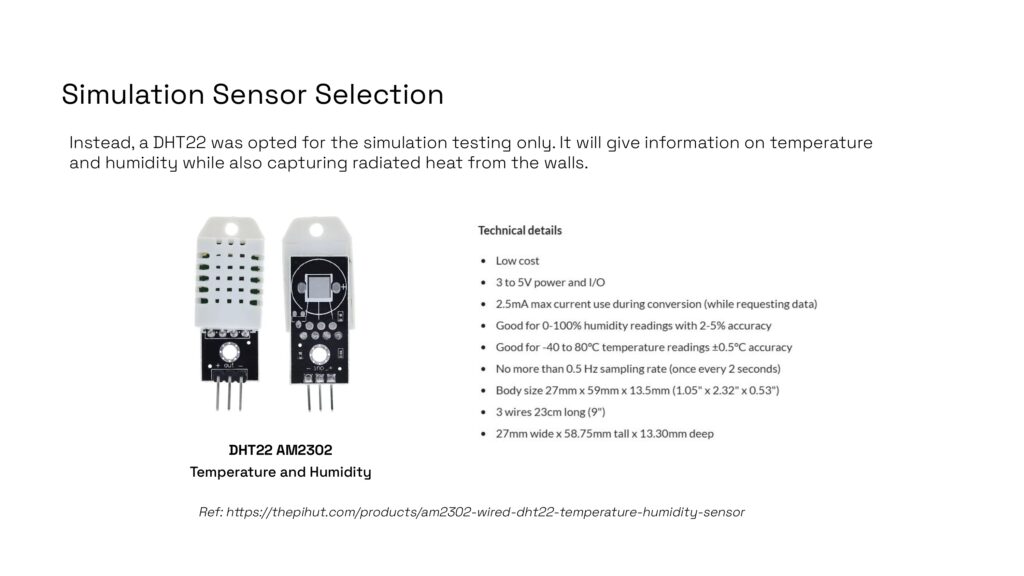
- https://thepihut.com/products/am2302-wired-dht22-temperature-humidity-sensor
