Studio Task 3: Shape

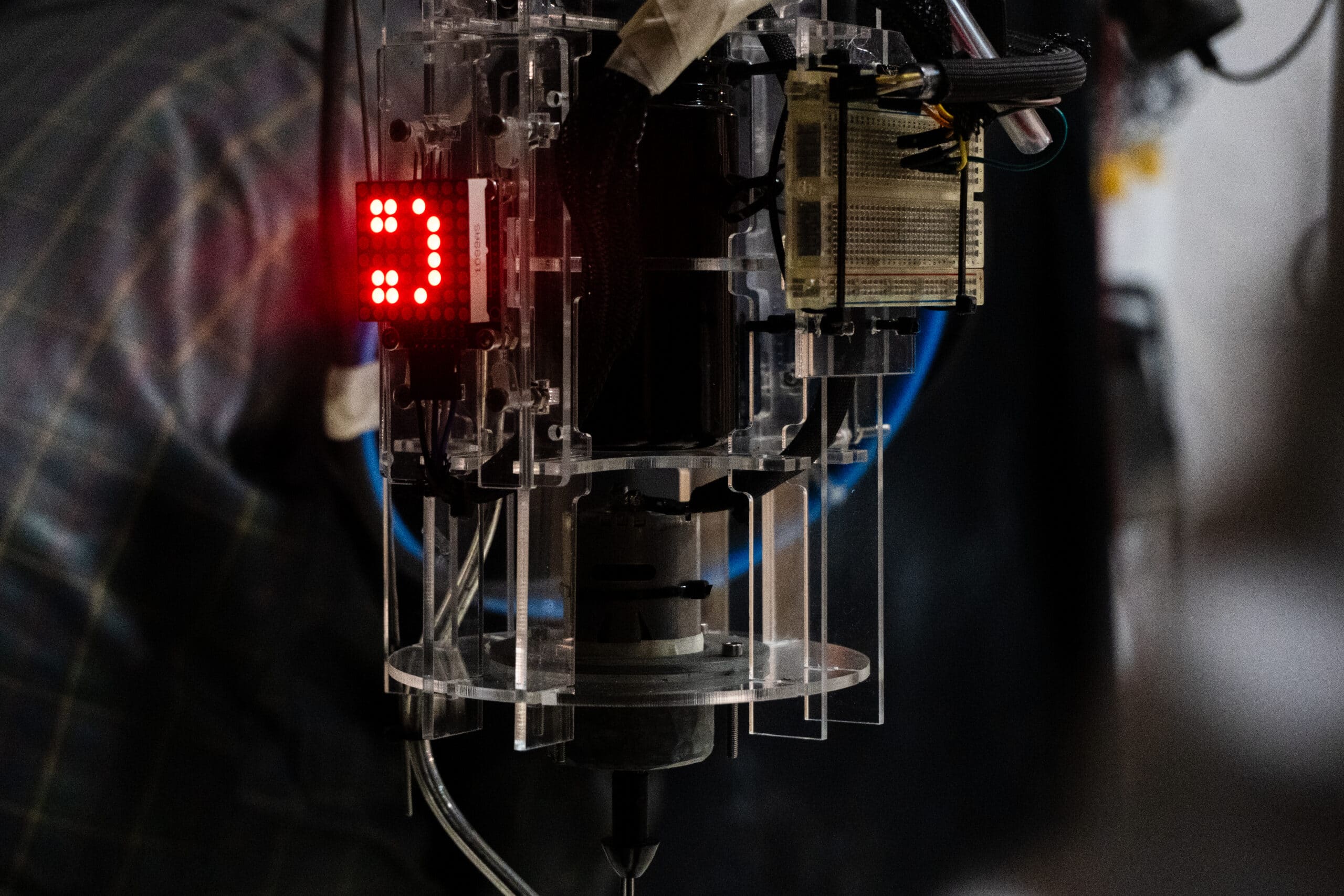
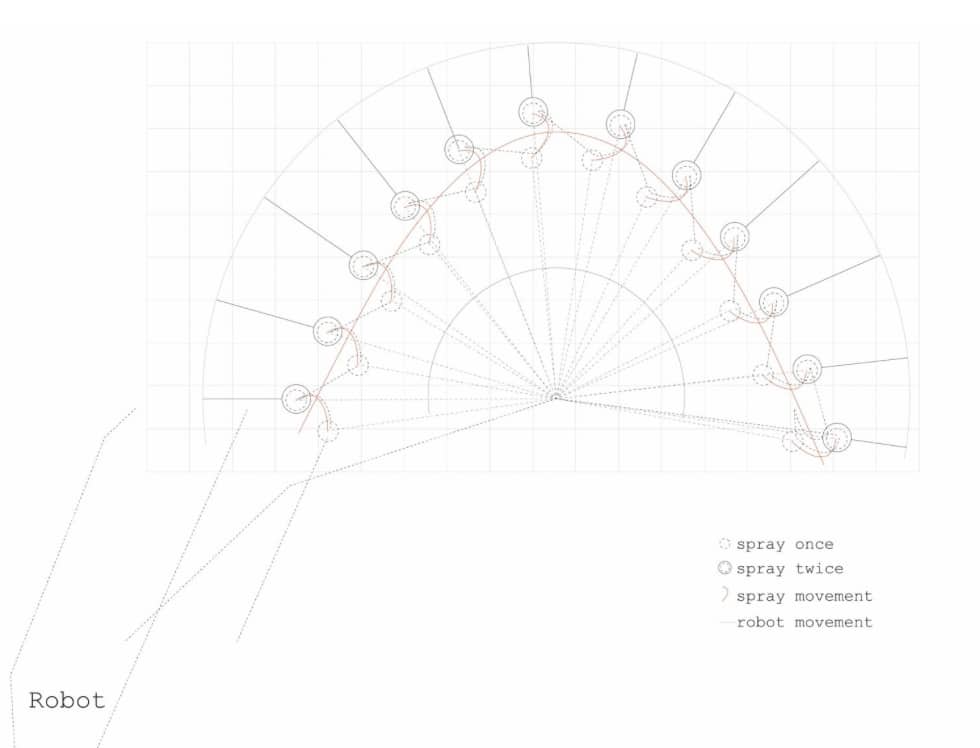
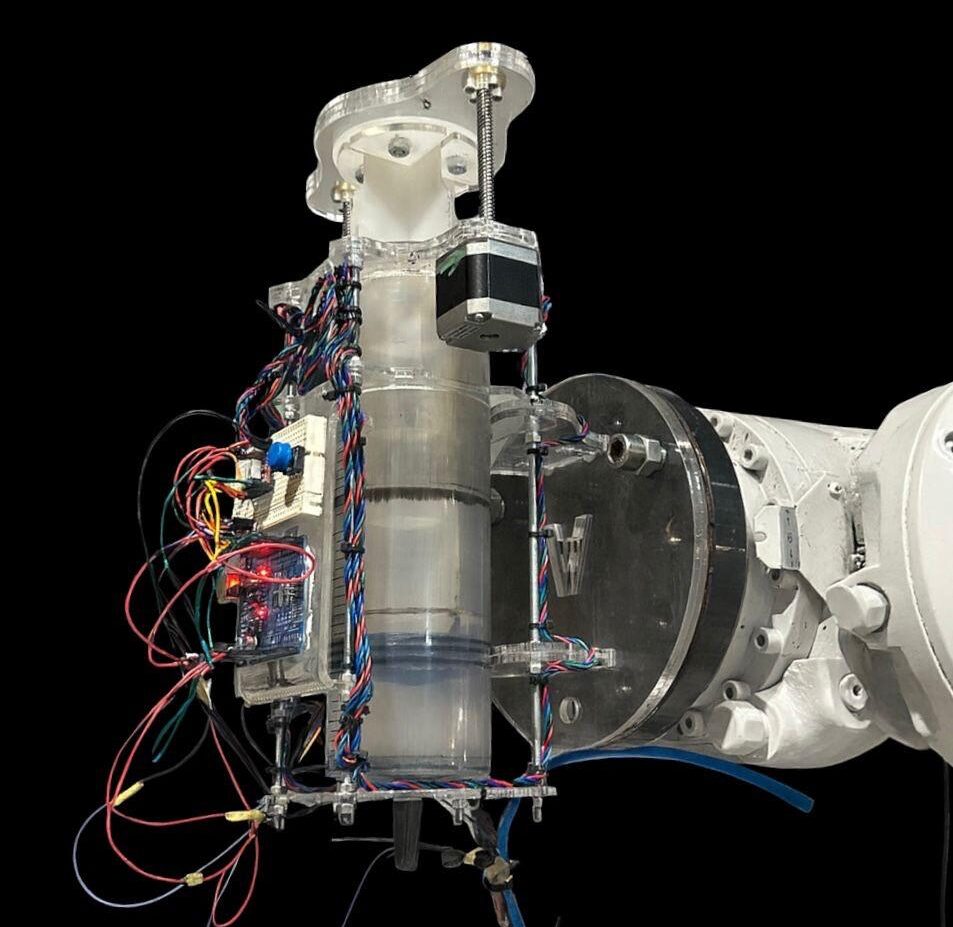
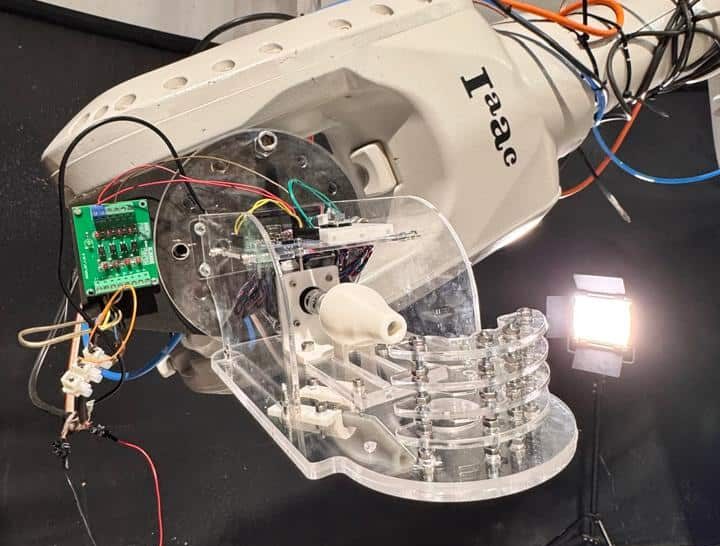
Anatomy of the Machine: Impact Printing abc What is Impact printing? Whilst clay has been used as a construction method for thousands of years, with evidence of buildings dating back to as early as 9000-10,000 BC in Mesopotamia, impact printing is a extremely modern take of the additive construction process. Research particuarly at ETH Zurich … Read more