Material Stories / Clay
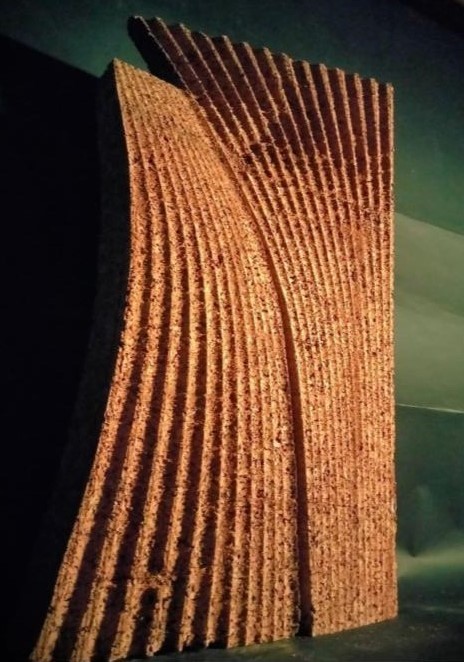
The analyzed material of our team in this class is clay, which is a fine/grained sediment primarily composed of small particles of minerals that are formed when rocks are exposed to different elements such as rain, wind and temperature changes. It can be considered as a natural material which is taken from the Earth, however … Read more